一种具有多自由度管路系统的智能水泥浇筑轨道车
1.本发明涉及机械制造技术领域和智能建造技术应用领域,尤其涉及一种具有多自由度管路系统的智能水泥浇筑轨道车。
背景技术:
2.传统意义的水泥车是没有浇筑功能的,一般的水泥车水泥车是专供油气井进行循环、冲洗的特种车辆,是重要的循环设备,压井、固井作业时,可以用来搅拌水泥浆,向井中注入水泥浆,以达到封固套管、井壁的作用,采油时可以向井内挤入清蜡剂、杀菌剂等,以达到清蜡、杀菌的目的;在井下作业时,可以用来洗井、冲砂、清蜡、套管试压、找窜、堵水、打水泥塞、替油、低压酸化压裂等;
3.目前的工程建设中,需要进行大量的水泥浇筑作业,水泥浇筑一般用于楼房、水泥大坝等建筑结构建造,油气井的压井、固井作业等。一般是水泥输送泵将搅拌好的水泥浆通过管路输送至预定浇筑点附近,由人工通过拖动浇筑管路完成浇筑,其工作环境恶劣、劳动强度大、效率低,狭窄场合有一定的危险性,因此本发明提出一种具有多自由度管路系统的智能水泥浇筑轨道车以解决现有技术中存在的问题。
技术实现要素:
4.本发明的目的在于提出一种具有多自由度管路系统的智能水泥浇筑轨道车,该水泥浇筑轨道车的智能多自由度管路系统具有节省人力资源及时间成本的优点,解决现有技术中人力资源及时间成本较高的问题。
5.为实现本发明的目的,本发明通过以下技术方案实现:一种具有多自由度管路系统的智能水泥浇筑轨道车,包括轨道车本体和控制系统,所述轨道车本体与控制系统连接,所述轨道车本体上安装有支撑立柱,且轨道车体通过行车电机驱动,所述支撑立柱的一侧在轨道车体上安装有砼箱,且砼箱内安装有砼泵,所述砼箱的上方设有水泥输送管路,且水泥输送管路通过辅助支撑架与支撑立柱铰接,所述水泥输送管路的两端分别转动安装有第一连接管和第二连接管,并均通过旋转机构驱动,所述第一连接管与砼泵的输出端连接,所述第二连接管远离水泥输送管路的一端通过第一回转接头安装有第三连接管,并通过第一伺服电机驱动,所述第三连接管远离第二连接管的一端通过第二回转接头安装有浇筑管,且第三连接管的上方设有平行连杆,所述平行连杆分别与第一回转接头和第二回转接头连接。
6.进一步改进在于:所述旋转机构包括第二伺服电机,所述第二伺服电机的输出端安装有行星减速器,所述行星减速器上安装有可解锁双向逆止器,且可解锁双向逆止器的上方设有主动齿轮,且主动齿轮与行星减速器的输出端连接。
7.进一步改进在于:所述水泥输送管路和第二连接管上均安装有被动齿轮,所述被动齿轮与其对应位置的主动齿轮啮合,搜书主动齿轮的外侧设有防护罩,且防护罩与行星减速器连接。
8.进一步改进在于:所述辅助支撑架的上方在支撑立柱上安装有承重连接板,所述承重连接板上通过铰接件与辅助支撑架连接,所述辅助支撑架的下方在支撑立柱上安装有固定架,且固定架与第一连接管连接。
9.进一步改进在于:所述控制系统包括工控机、数据采集卡、信号调理模块,所述工控机与数据采集卡连接,所述数据采集卡与信号调理模块连接,所述信号调理模块与第一伺服电机、第二伺服电机、行车电机电连接,并用于输送对应的驱动信号,所述控制系统内还设有软件驱动模块。
10.进一步改进在于:所述软件驱动模块包括人机交互单元、处理单元、数据采集单元、传感器单元,所述人机交互单元与处理单元连接,且人机交互单元用于人机交互,所述处理单元与数据采集单元连接,且处理单元用于系统模式识别及算法实现,所述数据采集单元与传感器单元连接,且数据采集单元用于采集数据,所述传感器单元用于检测数据。
11.进一步改进在于:所述控制系统内还包括有传感器模块和相机模块,所述传感器模块和相机模块均与信号调理模块电连接。
12.进一步改进在于:所述软件驱动模块内还设有驱动输出信号单元和报警及故障保护单元,所述驱动输出信号单元和报警及故障保护单元均与处理单元连接。
13.本发明的有益效果为:该种具有多自由度管路系统的智能水泥浇筑轨道车通过由水泥输送管路、第一连接管、第二连接管、第一回转接头、第二回转接头、第一伺服电机以及旋转机构组成一个多自由度运动的管路系统,依靠该多自由度运动的管路系统可以使本装置能够完成一些复杂的浇筑任务,解决了过去所需要的大量的人力资源,仅仅只需几个人就可以完成以往要许多人才能完成的工作,而且节省了大量的时间与成本,而且是有计算机控制的浇筑,所以可以对水泥的用量进行精妙的控制,同时,采用多自由度运动管路系统,使得本装置有着更好的适用性,可以解决在复杂环境下的工程问题。最后手动解锁双向逆止器的情况下,浇筑管路还可以手动拖动,实现应急手动,在一些不能通电的情况下,或者是机械发生故障的情况的下依然可以正常工作。
附图说明
14.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
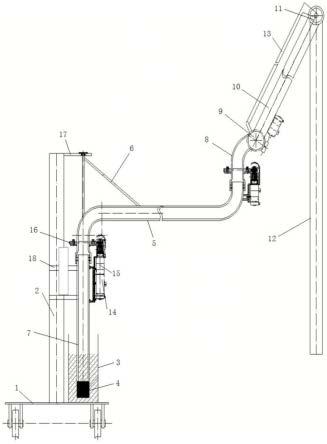
15.图1是本发明的结构示意图。
16.图2是本发明的控制系统结构示意图。
17.图3是本发明的软件驱动模块结构示意图。
18.图4是本发明的浇筑工作流程示意图。
19.其中:1、轨道车本体;2、支撑立柱;3、砼箱;4、砼泵;5、水泥输送管路;6、辅助支撑架;7、第一连接管;8、第二连接管;9、第一回转接头;10、第三连接管;11、第二回转接头;12、浇筑管;13、平行连杆;14、第二伺服电机;15、行星减速器;16、被动齿轮;17、承重连接板;18、固定架。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.根据图1-图4所示,本实施例提出了一种具有多自由度管路系统的智能水泥浇筑轨道车,包括轨道车本体1和控制系统,轨道车本体1与控制系统连接,轨道车本体1上安装有支撑立柱2,且轨道车体通过行车电机驱动,支撑立柱2的一侧在轨道车体上安装有砼箱3,且砼箱3内安装有砼泵4,砼箱3的上方设有水泥输送管路5,且水泥输送管路5通过辅助支撑架6与支撑立柱2铰接,水泥输送管路5的两端分别转动安装有第一连接管7和第二连接管8,并均通过旋转机构驱动,第一连接管7与砼泵4的输出端连接,第二连接管8远离水泥输送管路5的一端通过第一回转接头9安装有第三连接管10,并通过第一伺服电机驱动,第三连接管10远离第二连接管8的一端通过第二回转接头11安装有浇筑管12,且第三连接管10的上方设有平行连杆13,平行连杆13分别与第一回转接头9和第二回转接头11连接。
22.其中,由水泥输送管路5、第一连接管7、第二连接管8、第一回转接头9、第二回转接头11、第一伺服电机以及旋转机构组成一个多自由度运动的管路系统,依靠该多自由度运动的管路系统可以使本装置能够完成一些复杂的浇筑任务,正常工作时,轨道车在控制器控制下启动、按预定轨迹运动寻找、识别浇筑位置开始浇筑,浇筑过程中自动按照需要浇筑的路径和速度运行保证浇筑均匀,浇筑结束管路恢复到初始位置;停电或故障时,手动解锁可解锁双向逆止器的情况下,浇筑管12路还可以手动拖动,实现应急手动。
23.旋转机构包括第二伺服电机14,第二伺服电机14的输出端安装有行星减速器15,行星减速器15上安装有可解锁双向逆止器,且可解锁双向逆止器的上方设有主动齿轮,且主动齿轮与行星减速器15的输出端连接。
24.水泥输送管路5和第二连接管8上均安装有被动齿轮16,被动齿轮16与其对应位置的主动齿轮啮合,所述主动齿轮的外侧设有防护罩,且防护罩与行星减速器15连接。
25.辅助支撑架6的上方在支撑立柱2上安装有承重连接板17,承重连接板17上通过铰接件与辅助支撑架6连接,辅助支撑架6的下方在支撑立柱2上安装有固定架18,且固定架18与第一连接管7连接。
26.控制系统包括工控机、数据采集卡、信号调理模块,工控机与数据采集卡连接,数据采集卡与信号调理模块连接,信号调理模块与第一伺服电机、第二伺服电机14、行车电机电连接,并用于输送对应的驱动信号,控制系统内还设有软件驱动模块,其中,工控机通过数据采集卡对各类采集信号进行实时采集,并通过人机界面进行显示和监视,该人机界面是设置在工控机上的,同时控制系统的核心是浇筑管12路的定位识别准确性和伺服机构的实现。
27.软件驱动模块包括人机交互单元、处理单元、数据采集单元、传感器单元,人机交互单元与处理单元连接,且人机交互单元用于人机交互,处理单元与数据采集单元连接,且处理单元用于系统模式识别及算法实现,数据采集单元与传感器单元连接,且数据采集单元用于采集数据,传感器单元用于检测数据,其中,处理单元是软件驱动模块的核心,负责调配其它子控制单元的协调动作,从而通过工控机对各个电机输送驱动信号,确保轨道车
在浇筑时,能够进行精准的控制。
28.控制系统内还包括有传感器模块和相机模块,传感器模块和相机模块均与信号调理模块电连接,传感器模块主要是对轨道车上进行多个传感器的布置,由传感器模块及相机模块能够采集当前轨道车的工作数据,并且便于数据采集卡进行采集。
29.软件驱动模块内还设有驱动输出信号单元和报警及故障保护单元,驱动输出信号单元和报警及故障保护单元均与处理单元连接。
30.本实施例中如图4所示,在工作中,通过铺设轨道来使轨道车进行移动,以此达到具体的施工地点,在砼箱3中注入混凝土一般是与水泥搅拌车配合使用,打开在支撑立柱2上的伺候电机,使砼泵4进入工作状态,随后将立柱支撑上的可解锁双向逆止器关闭,同样将平行连杆13下方的可解锁双向逆止器也关闭,随后打开工控机利用视觉系统对工作目标的位置进行定位计算目标位置坐标,计算完毕反馈与计算机进行检验,检验完成开始工作,在面对停电等突发情况时,则打开防护罩,打开双向逆止器可以进行手动操作,其中,视觉系统是通过传感器模块和相机模块组成的,并依靠相机模块和传感器模块收集的数据,对工作目标的位置进行定位。
31.多自由度运动的管路系统主要是借鉴了机器人关节的工作原理,即采用多个自由度的设计,在本实施例中,是采用多个自由度机械臂的设计,来进行水泥浇筑,在此过程中,需要构建机械臂运动的物理模型,为了使机械臂末端到达指定位置,即已知末端执行器的工作空间位姿,就需要驱动机械臂各关节由当前位置运动到与机械臂末端位姿相对应的位置,也就是获取各个关节的关节变量,首先要求出正向的运动学规律,根据d-h法则首先要求出关节角也就是相应的机械臂连杆参数,其次不断地采用相应的逆变换矩阵相乘相消的过程,这样可以把各个关节变量求解出来,最后求出逆向运动学的相关参数,即可得出可以机械臂运动的物理模型;
32.在建模中,假设机械臂的关节都是单自由度,机械臂拥有n个这样的关节,连杆被分别标注为0到n,用编号0来表示基座,用编号n来表示执行机构。对于n个连杆的机器人,前向运动学被表示为:
33.t
0n
(θ1,...,θn)=t
01
(θ1)t
12
(θ2)...t
n-1,n
(θn)
34.一旦参考坐标系之间的转换矩阵的d-h参数被确定,前向运动学就可以通过将这些旋转矩阵相乘得到,即通过如下形式的旋转矩阵表示相邻坐标在连杆之间的变换:
[0035][0036][0037]
依据具体情况在平衡机器的大小下开发了一系列机械臂的布局计划,并依据各连接杠杆的重量,运用静力学方法约摸估计出各个关节的力矩大小,因而采取与之配合的电机。选用一种基于总线的控制方案,可将总线上的计算机和联合控制器挂在一起。工控机基本作用是对各关节控制器施行监视,与此同一时间也进行机械臂行为学、轨迹规划方面的算法控制,关节控制器选用ti工厂的tms320lf2407 dsp,最重要的功能是完成位移,速率和力矩伺服把持算法的实现。
[0038]
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1