一种自动化调节力度的建筑智能桩机的制作方法
1.本发明涉及智能桩机技术领域,具体为一种自动化调节力度的建筑智能桩机。
背景技术:
2.地面建筑建造完成后,地面要承受很大的压力,为了保证地面有足够的抵抗压力的强度,所以就必须对承受建筑物的地面进行加固或者改善地面的承受方式,而在地基上打桩是最好的解决方式,打桩通常会使用到智能桩机,智能桩机可通过对周围土质、环境信息进行收集,自动确认适合的打桩深度,这能极大的提升打桩的便利度。
3.智能桩机在打桩过程中通常需要多次添加桩体以保证打桩深度,市场上常见的智能桩机加桩过程中,通常需要使用外部设备对桩体进行吊装至打桩地点,在吊装过程中会浪费大量时间,且吊装过程中容易造成桩体位置偏移,这对打桩的效率造成极大影响。
技术实现要素:
4.本发明的目的在于提供一种自动化调节力度的建筑智能桩机,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种自动化调节力度的建筑智能桩机,包括限位座、固定台和液压座,所述限位座的外端设置有调位组件,所述固定台安置于限位座的顶部外侧,所述固定台的外端设置有加桩箱,且加桩箱的顶部外侧安置有第一电机,所述第一电机的输出端设置有转动轴,所述转动轴的外端设置有卡接座,且卡接座的内侧开设有安置槽,所述加桩箱的顶部右侧开设有入桩口,且加桩箱的左部开设有贯通槽,所述液压座安置于固定台的顶部内侧,且液压座的底部外侧设置有推出杆,所述推出杆的内侧安置有震动电机,所述安置槽内部设置有桩体,且桩体的外部两侧开设有齿槽,所述限位座的顶部两侧安置有调力组件,所述固定台的右部外端设置有对接组件。
6.进一步的,所述调位组件包括连接环、第一转动轴、转动座、接触板、丝杠和钻头,所述连接环的外端设置有第一转动轴,且第一转动轴的外端安置有转动座,所述转动座的内侧设置有接触板,且接触板的外部两侧设置有丝杠,所述丝杠的前段安置有钻头。
7.进一步的,所述连接环与限位座套接连接,且第一转动轴在连接环外端呈环状分布。
8.进一步的,所述丝杠与接触板呈垂直状分布,且丝杠的竖直中心线与钻头的竖直中心线相互重合。
9.进一步的,所述第一电机通过转动轴与卡接座转动连接,且卡接座在转动轴外端呈环状分布。
10.进一步的,所述入桩口的竖直中心线与限位座的竖直中心线相互重合,且入桩口的直径大于桩体的直径。
11.进一步的,所述调力组件包括调力箱、第二电机和转动齿轮,所述调力箱的内侧安置有第二电机,且第二电机的输出端设置有转动齿轮。
12.进一步的,所述转动齿轮与齿槽相互啮合,且齿槽沿桩体的中心线开设有两道。
13.进一步的,所述对接组件包括衔接转座、连接板、第三电机、第二转动轴、调位转块、液压缸、对接座,所述衔接转座的外端设置有连接板,且连接板的外侧中端设置有第三电机,所述第三电机的输出端连接有第二转动轴,所述第三电机的外部两侧设置有调位转块,且调位转块的外端连接有液压缸,所述液压缸的后部外侧安置有对接座。
14.进一步的,所述第三电机通过第二转动轴与固定台转动连接,且第三电机通过螺栓与连接板转动连接,而且液压缸通过调位转块与连接板转动连接。
15.本发明提供了一种自动化调节力度的建筑智能桩机,具备以下有益效果:在桩体进入当前的卡接座内侧后,通过第一电机进行工作,能使旋位轴带动卡接座进行旋转,这使得卡接座能从入桩口底部移离,并能使新的卡接座移动至入桩口的底部,重复该操作,能使加桩箱内部安置复数的桩体,这使得设备在进行打桩加桩的过程中,无需暂停操作和吊装桩体便可完成加桩操作,通过调力箱内侧的第二电机进行工作,能使转动齿轮推动齿槽和桩体进行下移,这使得桩体在进行打桩的过程中,可通过液压座和第二电机的双重驱动提升打桩力度,这使得设备的打桩效率可进一步提升,此外这也使设备可自动、灵活的调节打桩力度。
16.1、本发明通过旋转第一转动轴,能使第一转动轴带动转动座和接触板进行水平转向,这使得转动座和接触板能朝向地面一侧,而通过拉动接触板,能使接触板通过转动座进行垂直角度的旋转,这使得接触板与地面的布置位点能够再次调节,通过对接触板进行转动角度的多次调节,能保证接触板能完整贴合在凹凸不平的施工地面上,这能保证接触板对限位座的支撑稳定性,从而保证限位座始终具有较好的定位和定向效果,而通过转动连接环,能使连接环带动第一转动轴进行旋转,这使得接触板的落点位置能进行更改,这能避免接触板落点位置存在坑洞或土质松软无法进行定位的情况发生,而通过拧动丝杠,能使钻头钻入土层内,这使得接触板的支撑稳定性进一步提升。
17.2、本发明桩体通过入桩口进入加桩箱内侧后,能进入卡接座内侧的安置槽中进行限位,卡接座在加桩箱内侧设置有复数个,在桩体进入当前的卡接座内侧后,通过第一电机进行工作,能使旋位轴带动卡接座进行旋转,这使得卡接座能从入桩口底部移离,并能使新的卡接座移动至入桩口的底部,重复该操作,能使加桩箱内部安置复数的桩体,这使得设备在进行打桩加桩的过程中,无需暂停操作和吊装桩体便可完成加桩操作,此外入桩口与液压座不处于同一直线,这使得设备亦可在打桩过程中继续进行加桩,这使得设备的施工效率能进一步提升。
18.3、本发明桩体的下移路线上存在石块影响桩体的正常下移时,液压座会从冲击打桩更改为挤压打桩,同时推出杆内侧的震动电机进行工作,这使得推出杆能向桩体上传递高频震动,通过高频震动配合持续挤压,能使石块快速破裂,这能极大的降低石块阻挡对打桩的影响,此外桩体进入限位座内侧后,其两端的齿槽会与转动齿轮进行啮合,若打桩的土层过硬或打桩过程中桩体被石块阻挡时,通过调力箱内侧的第二电机进行工作,能使转动齿轮推动齿槽和桩体进行下移,这使得桩体在进行打桩的过程中,可通过液压座和第二电机的双重驱动提升打桩力度,这使得设备的打桩效率可进一步提升,此外这也使设备可自动、灵活的调节打桩力度,这使得设备的工作灵活度可得到提升。
19.4、本发明车体处于凹凸不平的路面导致液压座和推出杆倾斜时,通过第三电机进
行工作,能使第二转动轴带动固定台进行水平旋转,这使得固定台的水平位点可进行更改,固定台与连接板之间安置的衔接转座在保证固定台可进行正常旋转的情况下,能提升固定台与连接板之间的衔接力度,这能有效避免固定台与连接板之间衔接力度较低造成设备零件在长时间使用后折断分离的情况发生,液压缸工作进行推出后,连接板和固定台能通过调位转块进行垂直转向,这让固定台能进行多角度的旋转调位,从而保证其在凹凸不平路面上的垂直放置,这能保证打桩过程稳定性和精准度。
附图说明
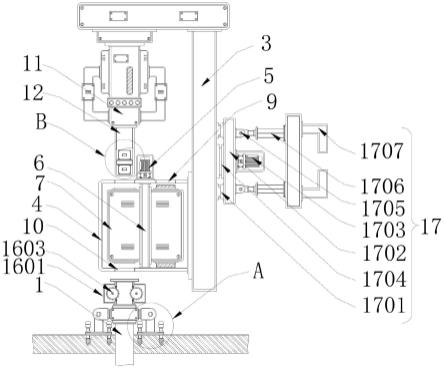
20.图1为本发明一种自动化调节力度的建筑智能桩机的正视整体结构示意图;
21.图2为本发明一种自动化调节力度的建筑智能桩机的图1中a处放大结构示意图;
22.图3为本发明一种自动化调节力度的建筑智能桩机的调位组件俯视结构示意图;
23.图4为本发明一种自动化调节力度的建筑智能桩机的加桩箱内部结构示意图;
24.图5为本发明一种自动化调节力度的建筑智能桩机的桩体结构示意图;
25.图6为本发明一种自动化调节力度的建筑智能桩机的调力组件结构示意图;
26.图7为本发明一种自动化调节力度的建筑智能桩机的图1中b处放大结构示意图。
27.图中:1、限位座;2、调位组件;201、连接环;202、第一转动轴;203、转动座;204、接触板;205、丝杠;206、钻头;3、固定台;4、加桩箱;5、第一电机;6、旋位轴;7、卡接座;8、安置槽;9、入桩口;10、贯通槽; 11、液压座;12、推出杆;13、震动电机;14、桩体;15、齿槽;16、调力组件;1601、调力箱;1602、第二电机;1603、转动齿轮;17、对接组件; 1701、衔接转座;1702、连接板;1703、第三电机;1704、第二转动轴;1705、调位转块;1706、液压缸;1707、对接座。
具体实施方式
28.请参阅图1-7,本发明提供技术方案:一种自动化调节力度的建筑智能桩机,包括限位座1、固定台3和液压座11,限位座1的外端设置有调位组件2,固定台3安置于限位座1的顶部外侧,固定台3的外端设置有加桩箱4,且加桩箱4的顶部外侧安置有第一电机5,第一电机5的输出端设置有旋位轴6,旋位轴6的外端设置有卡接座7,且卡接座7的内侧开设有安置槽8,加桩箱 4的顶部右侧开设有入桩口9,且加桩箱4的左部开设有贯通槽10,液压座 11安置于固定台3的顶部内侧,且液压座11的底部外侧设置有推出杆12,推出杆12的内侧安置有震动电机13,安置槽8内部设置有桩体14,且桩体 14的外部两侧开设有齿槽15,限位座1的顶部两侧安置有调力组件16,固定台3的右部外端设置有对接组件17。
29.请参阅图1-3,调位组件2包括连接环201、第一转动轴202、转动座203、接触板204、丝杠205和钻头206,连接环201的外端设置有第一转动轴202,且第一转动轴202的外端安置有转动座203,转动座203的内侧设置有接触板 204,且接触板204的外部两侧设置有丝杠205,丝杠205的前段安置有钻头 206,连接环201与限位座1套接连接,且第一转动轴202在连接环201外端呈环状分布,丝杠205与接触板204呈垂直状分布,且丝杠205的竖直中心线与钻头206的竖直中心线相互重合;
30.具体操作如下,限位座1能对打桩点进行定位,同时也可对桩体14的下移路线进行限位,将限位座1安置在需要进行打桩的位点后,通过旋转第一转动轴202,能使第一转动轴
202带动转动座203和接触板204进行水平转向,这使得转动座203和接触板204能朝向地面一侧,而通过拉动接触板204,能使接触板204通过转动座203进行垂直角度的旋转,这使得接触板204与地面的布置位点能够再次调节,通过对接触板204进行转动角度的多次调节,能保证接触板204能完整贴合在凹凸不平的施工地面上,这能保证接触板204 对限位座1的支撑稳定性,从而保证限位座1始终具有较好的定位和定向效果,而通过转动连接环201,能使连接环201带动第一转动轴202进行旋转,这使得接触板204的落点位置能进行更改,这能避免接触板204落点位置存在坑洞或土质松软无法进行定位的情况发生,而通过拧动丝杠205,能使钻头 206钻入土层内,这使得接触板204的支撑稳定性进一步提升。
31.请参阅图1、图4、图5、图6、图7,第一电机5通过旋位轴6与卡接座 7转动连接,且卡接座7在旋位轴6外端呈环状分布,入桩口9的竖直中心线与限位座1的竖直中心线相互重合,且入桩口9的直径大于桩体14的直径,调力组件16包括调力箱1601、第二电机1602和转动齿轮1603,调力箱1601 的内侧安置有第二电机1602,且第二电机1602的输出端设置有转动齿轮1603,转动齿轮1603与齿槽15相互啮合,且齿槽15沿桩体14的中心线开设有两道;
32.具体操作如下,将需要进行打桩的桩体14对准入桩口9后,能使桩体14 通过入桩口9进入加桩箱4内侧,而桩体14通过入桩口9进入加桩箱4内侧后,能进入卡接座7内侧的安置槽8中进行限位,卡接座7在加桩箱4内侧设置有复数个,在桩体14进入当前的卡接座7内侧后,通过第一电机5进行工作,能使旋位轴6带动卡接座7进行旋转,这使得卡接座7能从入桩口9 底部移离,并能使新的卡接座7移动至入桩口9的底部,重复该操作,能使加桩箱4内部安置复数的桩体14,这使得设备在进行打桩加桩的过程中,无需暂停操作和吊装桩体14便可完成加桩操作,此外入桩口9与液压座11不处于同一直线,这使得设备亦可在打桩过程中继续进行加桩,这使得设备的施工效率能进一步提升,在设备进行打桩的过程中,卡接座7能带动桩体14 移动至贯通槽10顶部,此时桩体14会通过贯通槽10移出加桩箱4,进入限位座1的内侧,而液压座11底端的推出杆12在进行推出的过程中,能穿过贯通槽10对桩体14进行施压,从而能实现设备的打桩,在打桩过程中,若桩体14的下移路线上存在石块影响桩体14的正常下移时,液压座11会从冲击打桩更改为挤压打桩,同时推出杆12内侧的震动电机13进行工作,这使得推出杆12能向桩体14上传递高频震动,通过高频震动配合持续挤压,能使石块快速破裂,这能极大的降低石块阻挡对打桩的影响,此外桩体14进入限位座1内侧后,其两端的齿槽15会与转动齿轮1603进行啮合,若打桩的土层过硬或打桩过程中桩体14被石块阻挡时,通过调力箱1601内侧的第二电机1602进行工作,能使转动齿轮1603推动齿槽15和桩体14进行下移,这使得桩体14在进行打桩的过程中,可通过液压座11和第二电机1602的双重驱动提升打桩力度,这使得设备的打桩效率可进一步提升,此外这也使设备可自动、灵活的调节打桩力度,这使得设备的工作灵活度可得到提升。
33.请参阅图1,对接组件17包括衔接转座1701、连接板1702、第三电机 1703、第二转动轴1704、调位转块1705、液压缸1706、对接座1707,衔接转座1701的外端设置有连接板1702,且连接板1702的外侧中端设置有第三电机1703,第三电机1703的输出端连接有第二转动轴1704,第三电机1703 的外部两侧设置有调位转块1705,且调位转块1705的外端连接有液压缸 1706,液压缸1706的后部外侧安置有对接座1707,第三电机1703通过第二转动轴1704与固定台3转动连接,且第三电机1703通过螺栓与连接板1702 转动连接,而且液压缸1706通过调位转块1705与连接板1702转动连接;
34.具体操作如下,对接座1707可与外界的移动车体进行对接,这使得设备可通过外界车体的位移进行灵活移动,从而能实现设备的移动打桩,设备在打桩过程中,若车体处于凹凸不平的路面导致液压座11和推出杆12倾斜时,通过第三电机1703进行工作,能使第二转动轴1704带动固定台3进行水平旋转,这使得固定台3的水平位点可进行更改,固定台3与连接板1702之间安置的衔接转座1701在保证固定台3可进行正常旋转的情况下,能提升固定台3与连接板1702之间的衔接力度,这能有效避免固定台3与连接板1702 之间衔接力度较低造成设备零件在长时间使用后折断分离的情况发生,液压缸1706工作进行推出后,连接板1702和固定台3能通过调位转块1705进行垂直转向,这让固定台3能进行多角度的旋转调位,从而保证其在凹凸不平路面上的垂直放置,这能保证打桩过程稳定性和精准度。
35.综上,该一种自动化调节力度的建筑智能桩机,使用时,首先限位座1 能对打桩点进行定位,同时也可对桩体14的下移路线进行限位,将限位座1 安置在需要进行打桩的位点后,通过旋转第一转动轴202,能使第一转动轴 202带动转动座203和接触板204进行水平转向,这使得转动座203和接触板 204能朝向地面一侧,而通过拉动接触板204,能使接触板204通过转动座203 进行垂直角度的旋转,这使得接触板204与地面的布置位点能够再次调节,通过对接触板204进行转动角度的多次调节,能保证接触板204能完整贴合在凹凸不平的施工地面上,这能保证接触板204对限位座1的支撑稳定性,从而保证限位座1始终具有较好的定位和定向效果;
36.然后通过转动连接环201,能使连接环201带动第一转动轴202进行旋转,这使得接触板204的落点位置能进行更改,这能避免接触板204落点位置存在坑洞或土质松软无法进行定位的情况发生,而通过拧动丝杠205,能使钻头 206钻入土层内,这使得接触板204的支撑稳定性进一步提升;
37.接着将需要进行打桩的桩体14对准入桩口9后,能使桩体14通过入桩口9进入加桩箱4内侧,而桩体14通过入桩口9进入加桩箱4内侧后,能进入卡接座7内侧的安置槽8中进行限位,卡接座7在加桩箱4内侧设置有复数个,在桩体14进入当前的卡接座7内侧后,通过第一电机5进行工作,能使旋位轴6带动卡接座7进行旋转,这使得卡接座7能从入桩口9底部移离,并能使新的卡接座7移动至入桩口9的底部,重复该操作,能使加桩箱4内部安置复数的桩体14,这使得设备在进行打桩加桩的过程中,无需暂停操作和吊装桩体14便可完成加桩操作,此外入桩口9与液压座11不处于同一直线,这使得设备亦可在打桩过程中继续进行加桩,这使得设备的施工效率能进一步提升;
38.随后在设备进行打桩的过程中,卡接座7能带动桩体14移动至贯通槽10 顶部,此时桩体14会通过贯通槽10移出加桩箱4,进入限位座1的内侧,而液压座11底端的推出杆12在进行推出的过程中,能穿过贯通槽10对桩体14 进行施压,从而能实现设备的打桩,在打桩过程中,若桩体14的下移路线上存在石块影响桩体14的正常下移时,液压座11会从冲击打桩更改为挤压打桩,同时推出杆12内侧的震动电机13进行工作,这使得推出杆12能向桩体 14上传递高频震动,通过高频震动配合持续挤压,能使石块快速破裂,这能极大的降低石块阻挡对打桩的影响,此外桩体14进入限位座1内侧后,其两端的齿槽15会与转动齿轮1603进行啮合,若打桩的土层过硬或打桩过程中桩体14被石块阻挡时,通过调力箱1601内侧的第二电机1602进行工作,能使转动齿轮1603推动齿槽15和桩体14进行下移,这使得桩体14在进行打桩的过程中,可通过液压座11和第二电机1602的双重驱动提升打桩力度,这
使得设备的打桩效率可进一步提升,此外这也使设备可自动、灵活的调节打桩力度,这使得设备的工作灵活度可得到提升;
39.最后设备在打桩过程中,若车体处于凹凸不平的路面导致液压座11和推出杆12倾斜时,通过第三电机1703进行工作,能使第二转动轴1704带动固定台3进行水平旋转,这使得固定台3的水平位点可进行更改,固定台3与连接板1702之间安置的衔接转座1701在保证固定台3可进行正常旋转的情况下,能提升固定台3与连接板1702之间的衔接力度,这能有效避免固定台 3与连接板1702之间衔接力度较低造成设备零件在长时间使用后折断分离的情况发生,液压缸1706工作进行推出后,连接板1702和固定台3能通过调位转块1705进行垂直转向,这让固定台3能进行多角度的旋转调位,从而保证其在凹凸不平路面上的垂直放置,这能保证打桩过程稳定性和精准度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1