一种挖掘机器人电驱流量匹配系统与控制方法
1.本发明涉及一种挖掘机器人电驱流量匹配系统与控制方法,属于智能挖掘机领域。
背景技术:
2.电动化、智能化是液压挖掘机的主要发展趋势。目前,挖掘机器人是基于传统液压挖掘机改造而成,仍然采用柴油发动机驱动以及传统的负载敏感、正流量、负流量等电液控制系统,存在系统效率低、污染大等突出问题。由于挖掘机器人通过工作装置的轨迹控制来实现铲斗的预定动作,难以像传统挖掘机那样通过驾驶员人为调节各执行器的流量来控制铲斗的动作,所以会出现流量不匹配的问题,尤其是流量饱和问题,导致各执行机构的运动不协调,无法准确完成预设的复合动作。
技术实现要素:
3.针对上述现有技术存在的问题,本发明提供一种挖掘机器人电驱流量匹配系统与控制方法,提高挖掘机器人作业的精准性、效率和节能性。
4.为了实现上述目的,本发明采用的一种挖掘机器人电驱流量匹配系统,包括变转速流量匹配系统、上位机控制器、执行器位置检测装置;
5.所述变转速流量匹配系统包括变速电机、液压泵、比例多路阀和液压执行器,所述变速电机和所述液压泵连接,变速电机接收上位机控制器的控制信号,驱动液压泵输出需求流量到液压系统;所述比例多路阀与对应的液压执行器连接,比例多路阀接收上位机控制器的控制信号,控制方向和开口大小,输出相应的液压油驱动对应的液压执行器,各液压执行器上安装有对应的执行器位置检测装置。
6.作为改进,所述液压执行器包括回转马达、动臂油缸、斗杆油缸以及铲斗油缸。
7.作为改进,所述上位机控制器分别与执行器位置检测装置、变速电机、比例多路阀连接,上位机控制器接收执行器位置检测装置检测到的各液压执行器的位置信号,并发送控制信号给变速电机和比例多路阀,控制变速电机的转速以控制流量输出,同时控制比例多路阀开口以驱动液压执行器。
8.作为改进,所述执行器位置检测装置包括马达转角传感器、动臂油缸位移传感器、斗杆油缸位移传感器、铲斗油缸位移传感器;
9.所述执行器位置检测装置与上位机控制器连接,将检测信号传输给上位机控制器。
10.作为改进,所述上位机控制器包含轨迹规划程序c1、流量匹配程序c2和轨迹控制程序c3;
11.所述轨迹规划程序c1规划所述液压执行器的位移目标曲线;
12.所述流量匹配程序c2根据轨迹规划程序c1规划的执行器目标位移计算液压系统需求流量,并输出控制信号给所述变速电机,实现泵的流量匹配;
13.所述轨迹控制程序c3以轨迹规划程序c1规划的执行器目标位移为输入信号,以所述执行器位置检测装置检测到的执行器位移为反馈信号,控制所述比例多路阀的开口,实现所述液压执行器的位置伺服。
14.另外,本发明还提供了一种采用所述挖掘机器人电驱流量匹配系统的控制方法,包括以下步骤;
15.(a)以液压泵输出的最大流量和比例多路阀的最大流量作为限制条件进行轨迹规划;
16.(b)液压泵根据规划轨迹进行流量匹配输出;
17.(c)采用闭环控制进行执行器轨迹跟踪。
18.作为改进,所述步骤(a)以所述液压泵的最大输出流量和所述比例多路阀的最大流量作为限制条件进行轨迹规划;
19.所述轨迹规划为求解挖掘机液压执行器的位置-时间函数,所述液压执行器的位置-时间函数对时间的微分为执行器的速度;所述轨迹规划不满足流量限制条件时重新规划,直至满足限制条件;
20.所述限制条件为通过各液压执行器规划速度计算各自需求流量,并且各液压执行器需求流量应小于与该执行器匹配的比例多路阀的最大流量;所有液压执行器需求流量之和应小于所述液压泵能够输出的最大流量。
21.作为改进,所述步骤(b)液压泵根据规划轨迹进行流量匹配输出;
22.所述轨迹规划计算得到的所有流量之和作为液压泵流量控制参考信号,通过改变驱动电机转速改变液压泵输出流量来进行流量匹配。
23.作为改进,所述步骤(c)采用闭环控制进行执行器轨迹跟踪;所述轨迹规划得到的各液压执行器目标位移为参考信号,所述执行器位置检测装置检测到的执行器位移为反馈信号,通过控制器控制所述比例多路阀开口,驱动所述液压执行器按照规划轨迹运动,实现位置伺服;此步骤实现了所述比例多路阀对液压泵输出流量的再分配。
24.与现有技术相比,本发明的有益效果是:
25.1)本发明的电驱流量匹配系统运用流量匹配控制方法,采用变速电机驱动,同时通过比例多路阀对流量进行分配,实现了单泵-多执行器的控制,具有结构简单、系统效率高等优点。
26.2)本发明以液压泵的最大输出流量和比例多路阀的最大流量作为限制条件进行各液压执行器轨迹规划,液压泵根据规划轨迹进行流量输出,实现了流量匹配,避免了流量饱和问题,可提高电液系统的响应和效率。
附图说明
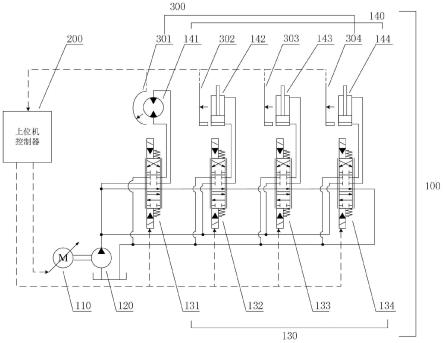
27.图1是挖掘机器人电驱流量匹配系统示意图;
28.图2是挖掘机器人电驱流量匹配系统的控制框图;
29.图3是挖掘机器人的机械结构示意图;
30.图中:100-变转速流量匹配系统,110-变速电机,120-液压泵,130-比例多路阀,131-液压马达比例多路阀,132-动臂油缸比例多路阀,133-斗杆油缸比例多路阀,134-铲斗油缸比例多路阀,140-液压执行器,141-回转马达,142-动臂油缸,143-斗杆油缸,144-铲斗
油缸,200-上位机控制器,300-执行器位置检测装置,301-马达转角传感器,302-动臂油缸位移传感器,303-斗杆油缸位移传感器,304-铲斗油缸位移传感器。
具体实施方式
31.为使本发明的目的、技术方案和优点更加清楚明了,下面对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
32.如图1所示,一种挖掘机器人电驱流量匹配系统,包括变转速流量匹配系统100、上位机控制器200、执行器位置检测装置300;
33.所述变转速流量匹配系统100包括变速电机110、液压泵120、比例多路阀130、液压执行器140,所述变速电机110和液压泵120连接,变速电机110接收上位机控制器200的控制信号,驱动液压泵120输出需求流量到液压系统;所述比例多路阀130分别与对应的液压执行器140连接,比例多路阀130接收上位机控制器200的控制信号,控制方向和开口大小,输出相应的液压油驱动对应的液压执行器140;所述液压执行器140包括回转马达141、动臂油缸142、斗杆油缸143、铲斗油缸144,各液压执行器上安装有对应的位置检测装置300。
34.作为实施例的改进,所述上位机控制器200分别与执行器位置检测装置300、变速电机110、比例多路阀130连接;上位机控制器200接收执行器位置检测装置300检测到的各液压执行器的位置信号;所述上位机控制器200发送控制信号给变速电机110,控制变速电机110转速以控制流量输出;上位机控制器200发送控制信号给比例多路阀130,控制比例多路阀130开口以驱动液压执行器140。
35.作为实施例的改进,所述执行器位置检测装置300包括马达转角传感器301、动臂油缸位移传感器302、斗杆油缸位移传感器303、铲斗油缸位移传感器304,所述执行器位置检测装置300与上位机控制器200连接,将检测信号传输给上位机控制器200。
36.作为实施例的改进,所述上位机控制器200包含轨迹规划程序c1、流量匹配程序c2、轨迹控制程序c3;
37.所述轨迹规划程序c1的功能为规划液压执行器140的位移目标曲线;流量匹配程序c2根据轨迹规划程序c1规划的执行器目标位移计算液压系统需求流量,并输出控制信号给变速电机110,实现泵的流量匹配;轨迹控制程序c3以轨迹规划程序c1规划的执行器目标位移为输入信号,以执行器位置检测装置300检测到的执行器位移为反馈信号,控制比例多路阀130的开口,实现液压执行器140的位置伺服。
38.如图3所示挖掘机器人的机械结构,通过对液压执行器140的控制,最终实现挖掘机器人整体的规划运动。
39.如图2所示,挖掘机器人电驱流量匹配系统的控制方法,包括以下步骤:
40.(a)以液压泵的最大输出流量和比例多路阀的最大流量作为限制条件进行轨迹规划;
41.(b)液压泵根据规划轨迹进行流量匹配输出;
42.(c)采用闭环控制进行执行器轨迹跟踪。
43.作为实施例的改进,所述步骤(a)以液压泵的最大输出流量和比例多路阀的最大流量作为限制条件进行轨迹规划:
44.在上位机控制器200中以液压泵120的最大输出流量和比例多路阀130的最大流量作为限制条件进行轨迹规划;轨迹规划为求解挖掘机器人执行器140的位置-时间函数li(t),i为执行器序号;执行器140的位置—时间函数对时间的微分为执行器的速度所述轨迹规划不满足流量限制条件时重新规划,如增加规划时间t、延长加速区间等,直至满足限制条件;
45.轨迹规划限制条件:
46.(1)执行器需求流量小于与该执行器匹配的比例多路阀的最大流量;
47.(2)所有执行器需求流量之和小于液压泵能够输出的最大流量。
48.已知执行器速度vi,可求得执行器需求流量qi:
49.液压缸:q=av,a为液压缸活塞有效作用面积,v为液压缸速度;
50.液压马达:q=nv,n为马达转速,v为马达排量。
51.执行器需求流量qi需要小于对应的阀的最大流量,避免阀的流量饱和问题发生;所有执行器总需求流量∑qi需要小于对应的泵的最大流量,避免泵的流量饱和问题发生。
52.作为实施例的改进,所述步骤(b)液压泵根据规划轨迹进行流量匹配输出:
53.在上位机控制器200中根据执行器需求流量计算液压泵120输出流量,并控制液压泵流量变化;
54.q
总
=∑qi+q
其他
=nv;
55.式中,n为驱动电机转速,v为液压泵排量。
56.上位机控制器200输出控制信号给变速电机110,通过改变转速来改变液压泵120输出流量以进行流量匹配。
57.作为实施例的改进,所述步骤(c)采用闭环控制进行各执行器的轨迹跟踪:
58.轨迹规划得到的各液压执行器140目标位移为参考信号,执行器位置检测装置300检测到的执行器位移为反馈信号,通过控制器控制所述比例多路阀130开口,驱动所述液压执行器140按照规划轨迹运动,实现位置伺服;此步骤实现了比例多路阀130对液压泵120输出流量的再分配。
59.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1