附属装置及电动挖掘机的制作方法
1.本说明书中公开的技术涉及一种附属装置及电动挖掘机。
背景技术:
2.在与电动挖掘机相关的技术领域中,已知有:像专利文献1中公开那样的使挖坑机钻头旋转而挖掘地面的电动工具。专利文献1中公开的电动工具在由作业者保持的状态下,使挖坑机钻头旋转而在地面形成出孔。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2020-196098号公报
技术实现要素:
6.电动挖掘机在由作业者保持的状态下实施挖掘对象的挖掘作业的情况下,有可能很难在挖掘对象处形成出目标孔。希望有能够辅助挖掘作业以使得能够在挖掘对象处形成出目标孔的技术。
7.本说明书中公开的技术的目的在于,在利用便携式电动挖掘机对挖掘对象进行挖掘的情况下,辅助挖掘作业以在挖掘对象处形成出目标孔。
8.本说明书公开一种装配于电动挖掘机的附属装置。电动挖掘机可以具备:马达外壳,该马达外壳对马达进行收纳;手柄外壳,该手柄外壳配置于所述马达外壳的后侧,且具有设置有用于启动马达的触发开关的握把部;齿轮外壳,该齿轮外壳配置于马达外壳的前侧,用于对齿轮进行收纳;以及旋转输出部,该旋转输出部自齿轮外壳向下方突出,且供钻头安装。附属装置可以具备辅助杆,该辅助杆在与钻头相邻的位置沿着上下方向配置。
9.发明效果
10.根据本说明书中公开的技术,辅助挖掘作业以在挖掘对象处形成出目标孔。
附图说明
11.图1是表示从前方观察第一实施方式的电动挖掘机的立体图。
12.图2是表示从后方观察第一实施方式的电动挖掘机的立体图。
13.图3是表示第一实施方式的电动挖掘机的侧视图。
14.图4是表示第一实施方式的电动挖掘机的截面图。
15.图5是表示从前方观察第一实施方式的附属装置的一部分的分解立体图。
16.图6是表示从后方观察第一实施方式的附属装置的一部分的分解立体图。
17.图7是表示从前方观察第一实施方式的附属装置的一部分的立体图。
18.图8是表示从后方观察第一实施方式的附属装置的一部分的立体图。
19.图9是表示从前方观察装配有第一实施方式的附属装置的一部分的电动挖掘机的立体图。
20.图10是表示从后方观察装配有第一实施方式的附属装置的一部分的电动挖掘机的立体图。
21.图11是表示从前方观察装配有第一实施方式的附属装置的一部分的电动挖掘机的立体图。
22.图12是表示从后方观察装配有第一实施方式的附属装置的一部分的电动挖掘机的立体图。
23.图13是表示从前方观察装配有第一实施方式的附属装置的电动挖掘机的立体图。
24.图14是表示从后方观察装配有第一实施方式的附属装置的电动挖掘机的立体图。
25.图15是表示装配有第一实施方式的附属装置的电动挖掘机的左视图。
26.图16是表示装配有第一实施方式的附属装置的电动挖掘机的右视图。
27.图17是表示装配有第一实施方式的附属装置的电动挖掘机的俯视图。
28.图18是表示装配有第一实施方式的附属装置的电动挖掘机的仰视图。
29.图19是表示装配有第一实施方式的附属装置的电动挖掘机的后视图。
30.图20是表示装配有第一实施方式的附属装置的电动挖掘机的主视图。
31.图21是表示第一实施方式的辅助杆的分解立体图。
32.图22是表示第一实施方式的辅助杆及保持部件的立体图。
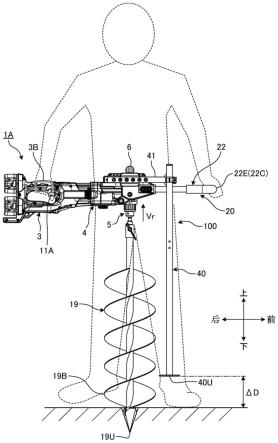
33.图23是用于说明装配有第一实施方式的附属装置的电动挖掘机的使用方法的侧视图。
34.图24是用于说明装配有第一实施方式的附属装置的电动挖掘机的使用方法的俯视图。
35.图25是表示从前方观察装配有第二实施方式的附属装置的电动挖掘机的立体图。
36.图26是表示从后方观察装配有第二实施方式的附属装置的电动挖掘机的立体图。
37.图27是表示装配有第二实施方式的附属装置的电动挖掘机的左视图。
38.图28是表示装配有第二实施方式的附属装置的电动挖掘机的右视图。
39.图29是表示装配有第二实施方式的附属装置的电动挖掘机的俯视图。
40.图30是表示装配有第二实施方式的附属装置的电动挖掘机的仰视图。
41.图31是表示装配有第二实施方式的附属装置的电动挖掘机的后视图。
42.图32是表示装配有第二实施方式的附属装置的电动挖掘机的主视图。
43.图33是表示第二实施方式的辅助杆及保持部件的立体图。
44.图34是表示第二实施方式的辅助杆及保持部件的截面图。
45.图35是表示从前方观察第二实施方式的附属装置及电动挖掘机的立体图。
46.图36是表示第二实施方式的附属装置及电动挖掘机的右视图。
47.图37是表示从前方观察第二实施方式的辅助杆及保持部件的变形例的立体图。
48.图38是表示从前方观察装配有第三实施方式的附属装置的电动挖掘机的立体图。
49.图39是表示从后方观察装配有第三实施方式的附属装置的电动挖掘机的立体图。
50.图40是表示装配有第三实施方式的附属装置的电动挖掘机的左视图。
51.图41是表示装配有第三实施方式的附属装置的电动挖掘机的右视图。
52.图42是表示装配有第三实施方式的附属装置的电动挖掘机的俯视图。
53.图43是表示装配有第三实施方式的附属装置的电动挖掘机的仰视图。
54.图44是表示装配有第三实施方式的附属装置的电动挖掘机的后视图。
55.图45是表示装配有第三实施方式的附属装置的电动挖掘机的主视图。
56.图46是用于说明第三实施方式的电动挖掘机的使用方法的侧视图。
57.图47是用于说明第三实施方式的电动挖掘机的使用方法的主视图。
58.图48是表示从前方观察第四实施方式的电动挖掘机的立体图。
59.图49是表示从前方观察第五实施方式的电动挖掘机的立体图。
60.符号说明
61.1a
…
电动挖掘机、1b
…
电动挖掘机、2
…
马达外壳、2e
…
排气口、3
…
手柄外壳、3a
…
前部、3b
…
握把部、3c
…
控制器收纳部、3d
…
蓄电池连接部、4
…
齿轮外壳、4a
…
盖、5
…
旋转输出部、5a
…
转接器、5b
…
固定件、6
…
前握把、6c
…
螺钉开口、6h
…
桥接部、6l
…
左臂部、6r
…
右臂部、7
…
蓄电池装配部、8
…
马达、9
…
正反转切换杆、10
…
主开关、11
…
触发开关、11a
…
触发器杆、11b
…
开关电路、13
…
控制器、14
…
减速机构、15
…
速度切换杆、16
…
螺孔、17
…
蓄电池组、17c
…
解除按钮、18
…
螺孔、19
…
钻头、19a
…
挖掘转轴、19b
…
挖掘刃、19c
…
前端钻、19d
…
切削钻、19u
…
下端部、20
…
辅助手柄、21
…
手柄接头、21a
…
主体部、21b
…
螺钉凸台部、21c
…
螺钉凸台部、21l
…
左手柄接头、21r
…
右手柄接头、22
…
手柄、22l
…
左棒部、22r
…
右棒部、22c
…
连结棒部、22e
…
盖、23
…
反作用力接受部件、23a
…
固定棒部、23b
…
伸出棒部、23c
…
盖、23d
…
盖、23e
…
螺钉开口、24
…
手柄孔、25
…
内侧凹部、26
…
外侧凹部、27
…
螺孔、28
…
螺钉开口、29
…
螺钉开口、30
…
螺钉开口、31
…
螺钉、32
…
螺钉、33
…
螺钉、34
…
螺钉、35
…
螺钉、36
…
螺钉、37
…
螺钉、40
…
辅助杆、40a
…
管部、40b
…
脚部、40c
…
帽部、40d
…
螺钉开口、40e
…
插塞部、40f
…
凸缘部、40u
…
下端部、41
…
保持部件、42
…
螺钉开口、43
…
保持机构、44
…
夹紧部、44a
…
圆弧部、44b
…
板部、44c
…
板部、45
…
铰链、46
…
杆、47
…
螺钉、51
…
主轴、52
…
钻头卡盘、52a
…
插入孔、53
…
滚针轴承、54
…
滚珠轴承、55
…
锥齿轮、60
…
保持部件、61
…
第一保持部件、61a
…
上表面、61b
…
下表面、61h
…
保持孔、61l
…
凹部、61r
…
凹部、62
…
第二保持部件、62a
…
上表面、62b
…
下表面、62h
…
保持孔、62l
…
凹部、62r
…
凹部、63
…
螺钉开口、64
…
螺孔、65
…
螺钉、65a
…
螺钉、65b
…
螺钉、65c
…
螺钉、65d
…
螺钉、65e
…
螺钉、66
…
盖、67
…
螺钉开口、73
…
保持机构、74
…
夹紧部、74a
…
圆弧部、74b
…
板部、74c
…
板部、75
…
铰链、76
…
杆、77
…
螺钉、81
…
定子、81a
…
定子铁芯、81b
…
前侧绝缘子、81c
…
后侧绝缘子、81d
…
线圈、81e
…
传感器电路基板、81f
…
接线部件、82
…
转子、82a
…
转子转轴、82b
…
转子铁芯、82c
…
永久磁铁、83
…
轴承、84
…
轴承、85
…
离心风扇、90
…
辅助板、90a
…
前端部、91
…
螺钉开口、92
…
开口、93
…
狭缝开口、94
…
开口、100
…
附属装置、101
…
附属装置、102
…
附属装置、141
…
第一行星齿轮机构、141c
…
第一齿轮架、141p
…
行星齿轮、141r
…
内齿轮、141s
…
小齿轮、142
…
第二行星齿轮机构、142c
…
第二齿轮架、142p
…
行星齿轮、142r
…
内齿轮、142s
…
太阳轮、143
…
中间转轴、144
…
输出转轴、145
…
支撑销、146
…
支撑销、147
…
轴承、148
…
锥齿轮、150
…
切换部件、150h
…
孔、151
…
连接部件、151h
…
孔、202
…
马达外壳、203l
…
第一握把部、203r
…
第二握把部、204
…
齿轮外壳、205
…
旋转输出部、211
…
触发开关、217
…
蓄电池、219
…
钻头、240
…
辅助杆、290
…
辅助板、ax
…
旋转轴、bx
…
旋转轴、gr
…
反作用力、hr
…
反作用力、ra
…
规定方向、vr
…
反作用力、ya
…
紧固方向、yb
…
松弛方向、yc
…
紧固方向、yd
…
松弛方向、δd
…
距离。
具体实施方式
62.1个或1个以上的实施方式中,附属装置装配于电动挖掘机。电动挖掘机可以具备:马达外壳,该马达外壳对马达进行收纳;手柄外壳,该手柄外壳配置于马达外壳的后侧,且具有设置有用于启动马达的触发开关的握把部;齿轮外壳,该齿轮外壳配置于马达外壳的前侧,用于对齿轮进行收纳;以及旋转输出部,该旋转输出部自齿轮外壳向下方突出,且供钻头安装。附属装置可以具备辅助杆,该辅助杆在与钻头相邻的位置沿着上下方向配置。
63.上述构成中,辅助杆能够辅助挖掘作业,以便在挖掘对象处形成出目标孔。通过钻头旋转,从而在挖掘对象处形成出孔。通过辅助杆与由钻头形成的孔的周围的挖掘对象表面接触,从而在挖掘对象处形成出目标孔。
64.1个或1个以上的实施方式中,辅助杆的下端部可以配置成:比钻头的下端部更靠上方。
65.上述构成中,通过辅助杆的下端部配置成:比钻头的下端部更靠上方,从而在挖掘对象处形成出目标深度的孔。辅助杆的下端部与钻头的挖掘刃的下端部之间的上下方向上的距离由孔的目标深度决定,通过实施挖掘作业,直至辅助杆的下端部与由钻头形成的孔的周围的挖掘对象表面接触,从而在挖掘对象处形成出目标深度的孔。
66.1个或1个以上的实施方式中,附属装置可以具备:辅助手柄,该辅助手柄相对于齿轮外壳而进行拆装;以及保持部件,该保持部件相对于辅助手柄的至少一部分而进行拆装。辅助杆可以保持于保持部件。
67.上述构成中,辅助手柄由作业者的手把握,由此能够顺利地实施挖掘作业。辅助杆借助保持部件而被支撑于辅助手柄,因此,作业者能够用手握着辅助手柄而在挖掘对象处形成出目标深度的孔。
68.1个或1个以上的实施方式中,保持部件可以具有以能够拆装的方式对辅助杆进行保持的保持机构。保持机构可以具有:夹紧部,该夹紧部配置于辅助杆的周围的至少一部分;以及杆,该杆借助铰链而与夹紧部连结。通过杆沿着紧固方向转动,可以使得辅助杆固定于夹紧部。通过杆沿着松弛方向转动,可以使得夹紧部对辅助杆的固定得以解除。
69.上述构成中,通过杆沿着紧固方向转动,使得辅助杆相对于保持部件的上下方向上的位置得以固定。通过杆沿着松弛方向转动,使得辅助杆相对于保持部件的上下方向上的位置得以调整。
70.1个或1个以上的实施方式中,辅助手柄可以具有:固定于齿轮外壳的手柄接头、以及固定于手柄接头的手柄。保持部件可以固定于手柄接头。
71.上述构成中,保持部件借助手柄接头而被固定于齿轮外壳。作业者能够用手握着手柄。
72.1个或1个以上的实施方式中,手柄接头可以包括:固定于齿轮外壳的左部的左手柄接头、以及固定于齿轮外壳的右部的右手柄接头。可以在左手柄接头及右手柄接头中的一个手柄接头固定有保持部件,可以在另一个手柄接头固定有反作用力接受部件。
73.上述构成中,作业者能够借助反作用力接受部件而接受从旋转输出部向齿轮外壳传递的反作用力(日语:反力)。据此,电动挖掘机的姿态不稳定、或者保持电动挖掘机的作业者被摇晃的情形得以抑制。因此,在挖掘对象处形成出目标孔。另外,由于辅助杆与反作用力接受部件之间的干扰得以抑制,所以,能够顺利地实施挖掘作业。
74.1个或1个以上的实施方式中,手柄接头可以具有螺孔。保持部件可以具有:沿着前后方向空开间隔设置的多个螺钉开口。通过螺钉经由螺钉开口而被插入于螺孔,可以使得手柄接头和保持部件被固定。通过对供螺钉插入的螺钉开口进行选择,可以使得辅助杆的前后方向上的位置被调整。
75.上述构成中,辅助杆的前后方向上的位置得以简单调整。根据作业现场的状况,能够适当地调整钻头与辅助杆之间的前后方向上的距离。
76.1个或1个以上的实施方式中,辅助手柄可以具有:固定于齿轮外壳的手柄接头、以及固定于手柄接头的手柄。保持部件可以固定于手柄。
77.上述构成中,保持部件借助手柄及手柄接头而被固定于齿轮外壳。
78.1个或1个以上的实施方式中,保持部件可以包括:第一保持部件、以及配置成比第一保持部件更靠下方的第二保持部件。第一保持部件和第二保持部件可以配置成:将手柄从上下方向夹持。
79.上述构成中,第一保持部件和第二保持部件配置成:将手柄从上下方向夹持,因此,保持部件与手柄之间的固定得以稳定。
80.1个或1个以上的实施方式中,第一保持部件及第二保持部件中的一个保持部件可以具有螺钉开口。第一保持部件及第二保持部件中的另一个保持部件可以具有螺孔。通过螺钉经由螺钉开口而被插入于螺孔,可以使得第一保持部件、第二保持部件以及手柄被固定。
81.上述构成中,利用螺钉,将第一保持部件、第二保持部件以及手柄进行固定。
82.1个或1个以上的实施方式中,手柄可以配置成:从手柄接头向前方延伸。通过利用螺钉实现的第一保持部件和第二保持部件相对于手柄的固定予以解除,可以调整前后方向上的辅助杆的位置。
83.上述构成中,辅助杆的前后方向上的位置得以简单调整。根据作业现场的状况,能够适当地调整钻头与辅助杆之间的前后方向上的距离。
84.1个或1个以上的实施方式中,手柄接头可以包括:固定于齿轮外壳的左部的左手柄接头、以及固定于齿轮外壳的右部的右手柄接头。手柄可以包括:从左手柄接头向前方延伸的左棒部、从右手柄接头向前方延伸的右棒部、以及将左棒部的前端部和右棒部的前端部连结的连结棒部。保持部件可以分别固定于左棒部及右棒部。在左右方向上,可以在比左手柄接头及右手柄接头中的一个手柄接头更靠外侧的位置配置有辅助杆,在另一个手柄接头固定有反作用力接受部件。
85.上述构成中,保持部件分别固定于左棒部及右棒部,因此,保持部件与手柄之间的固定得以稳定。作业者能够借助反作用力接受部件而接受从旋转输出部向齿轮外壳传递的反作用力。据此,电动挖掘机的姿态不稳定、或者保持电动挖掘机的作业者被摇晃的情形得以抑制。因此,在挖掘对象处形成出目标孔。另外,辅助杆与反作用力接受部件之间的干扰得以抑制,所以,能够顺利地实施挖掘作业。
86.1个或1个以上的实施方式中,附属装置装配于电动挖掘机。电动挖掘机可以具备:马达外壳,该马达外壳对马达进行收纳;手柄外壳,该手柄外壳配置于马达外壳的后侧,且具有设置有用于启动马达的触发开关的握把部;齿轮外壳,该齿轮外壳配置于马达外壳的前侧,用于对齿轮进行收纳;以及旋转输出部,该旋转输出部自齿轮外壳向下方突出,且供
钻头安装。附属装置可以具备辅助板,该辅助板配置于齿轮外壳的左侧及右侧中的至少一者,能够接受从旋转输出部向齿轮外壳传递的反作用力。
87.上述构成中,辅助板能够辅助挖掘作业,以便在挖掘对象处形成出目标孔。作业者能够借助辅助板而接受从旋转输出部向齿轮外壳传递的反作用力。据此,电动挖掘机的姿态不稳定、或者保持电动挖掘机的作业者被摇晃的情形得以抑制。因此,在挖掘对象处形成出目标孔。
88.1个或1个以上的实施方式中,辅助板的前端部可以配置成:比齿轮外壳的前端部更靠前方。
89.上述构成中,由于辅助板的外形大于齿轮外壳的外形,所以,作业者能够借助辅助板而接受从旋转输出部向齿轮外壳传递的反作用力。
90.1个或1个以上的实施方式中,附属装置可以具备辅助手柄,该辅助手柄相对于齿轮外壳而进行拆装。辅助板可以固定于辅助手柄的至少一部分。辅助手柄可以具有:包括固定于齿轮外壳的左部的左手柄接头及固定于齿轮外壳的右部的右手柄接头在内的手柄接头、以及固定于手柄接头的手柄。辅助板可以固定于左手柄接头及右手柄接头中的一个手柄接头。
91.上述构成中,辅助手柄由作业者的手把握,由此能够顺利地实施挖掘作业。辅助手柄能够辅助挖掘作业,以便形成出目标孔。辅助板固定于左手柄接头及右手柄接头中的一个手柄接头,因此,作业者能够借助辅助手柄及辅助板而接受从旋转输出部向齿轮外壳传递的反作用力。
92.1个或1个以上的实施方式中,电动挖掘机可以具备:马达外壳,该马达外壳对马达进行收纳;手柄外壳,该手柄外壳配置于马达外壳的后侧,且具有设置有触发开关的握把部;齿轮外壳,该齿轮外壳配置于马达外壳的前侧,用于对齿轮进行收纳;旋转输出部,该旋转输出部自齿轮外壳向下方突出,且供钻头安装;以及上述的附属装置。
93.上述构成中,由与利用附属装置辅助挖掘作业,所以,在挖掘对象处形成出目标孔。
94.1个或1个以上的实施方式中,电动挖掘机可以具备:马达外壳,该马达外壳对马达进行收纳;第一握把部,该第一握把部配置于马达外壳的左侧;第二握把部,该第二握把部配置于所述马达外壳的右侧;触发开关,该触发开关用于启动马达;齿轮外壳,该齿轮外壳与马达外壳连接,用于对齿轮进行收纳;旋转输出部,该旋转输出部自齿轮外壳向下方突出,且供钻头安装;以及辅助杆,该辅助杆在与钻头相邻的位置沿着上下方向配置。
95.上述构成中,辅助杆能够辅助挖掘作业,以便在挖掘对象处形成出目标孔。通过钻头旋转,从而在挖掘对象处形成出孔。通过辅助杆与由钻头形成的孔的周围的挖掘对象表面接触,从而在挖掘对象处形成出目标孔。
96.1个或1个以上的实施方式中,辅助杆的下端部可以配置成:比钻头的下端部更靠上方。
97.上述构成中,通过辅助杆的下端部配置成:比钻头的下端部更靠上方,从而在挖掘对象处形成出目标深度的孔。辅助杆的下端部与钻头的挖掘刃的下端部之间的上下方向上的距离由孔的目标深度决定,通过实施挖掘作业,直至辅助杆的下端部与由钻头形成的孔的周围的挖掘对象表面接触为止,从而在挖掘对象处形成出目标深度的孔。
98.1个或1个以上的实施方式中,辅助杆可以配置于旋转输出部的左侧或右侧,能够在上下方向上移动,并在上下方向上的规定位置被固定。
99.上述构成中,由于辅助杆配置于旋转输出部的左侧或右侧,所以,能够抑制辅助杆妨碍挖掘作业的情形。另外,由于辅助杆的上下方向上的位置能够调整,所以,在挖掘对象处形成出目标深度的孔。
100.1个或1个以上的实施方式中,辅助杆可以安装于马达外壳及齿轮外壳中的至少一者。
101.上述构成中,由于辅助杆安装于电动挖掘机的适当部位,所以,能够抑制辅助杆妨碍挖掘作业的情形。
102.1个或1个以上的实施方式中,电动挖掘机可以具备:马达外壳,该马达外壳对马达进行收纳;第一握把部,该第一握把部配置于马达外壳的左侧;第二握把部,该第二握把部配置于马达外壳的右侧;触发开关,该触发开关用于启动马达;齿轮外壳,该齿轮外壳与马达外壳连接,用于对齿轮进行收纳;旋转输出部,该旋转输出部自齿轮外壳向下方突出,且供钻头安装;以及辅助板,该辅助板安装于马达外壳及齿轮外壳中的至少一者,以作业者的身体接受由旋转输出部的旋转所产生的反作用力。
103.上述构成中,辅助板能够辅助挖掘作业以在挖掘对象处形成出目标孔。作业者能够借助辅助板而接受从旋转输出部向齿轮外壳传递的反作用力。据此,电动挖掘机的姿态不稳定、或者保持电动挖掘机的作业者被摇晃的情形得以抑制。因此,在挖掘对象处形成出目标孔。
104.以下,参照附图,对本发明的实施方式进行说明,不过,本发明不限定于实施方式。以下说明的实施方式的构成要素可以适当组合。另外,也有时不采用一部分构成要素。
105.实施方式中,采用“左”、“右”、“前”、“后”、“上”以及“下”的术语,对各部分的位置关系进行说明。这些术语表示以电动挖掘机的中心为基准的相对位置或方向。
106.[第一实施方式]
[0107]
<电动挖掘机>
[0108]
图1是表示从前方观察本实施方式的电动挖掘机1a的立体图。图2是表示从后方观察本实施方式的电动挖掘机1a的立体图。图3是表示本实施方式的电动挖掘机1a的侧视图。图4是表示本实施方式的电动挖掘机1a的截面图。
[0109]
电动挖掘机1a为:在由作业者保持的状态下对挖掘对象进行挖掘而在挖掘对象处形成出孔的便携式电动挖掘机。本实施方式中,挖掘对象为地面。
[0110]
电动挖掘机1a具备:马达外壳2、手柄外壳3、齿轮外壳4、前握把6、蓄电池装配部7、控制器13、主开关10、触发开关11、正反转切换杆9、速度切换杆15、马达8、减速机构14、以及旋转输出部5。
[0111]
马达外壳2对马达8进行收纳。马达外壳2呈筒状。马达外壳2由合成树脂制成。马达外壳2具有:将马达外壳2的内部空间和外部空间连接的排气口2e。在马达外壳2的左部、右部及下部分别设置有排气口2e。马达外壳2的内部空间的空气经由排气口2e而向外部空间排出。
[0112]
手柄外壳3配置于马达外壳2的后侧。手柄外壳3的前部与马达外壳2的后部连接。手柄外壳3呈前后方向较长的环状。手柄外壳3由合成树脂制成。手柄外壳3具有:前部3a,其
与马达外壳2的后部连接;握把部3b,其从前部3a的上部向后方延伸;控制器收纳部3c,其从前部3a的下部向后方延伸;以及蓄电池连接部3d,其将握把部3b的后端部和控制器收纳部3c的后端部连结起来。握把部3b配置成:比控制器收纳部3c更靠上方。握把部3b配置于马达外壳2的后侧。作业者能够用手握住握把部3b。
[0113]
齿轮外壳4对减速机构14进行收纳。齿轮外壳4呈筒状。齿轮外壳4配置于马达外壳2的前侧。齿轮外壳4的后部与马达外壳2的前部连接。齿轮外壳4由铝制成。齿轮外壳4的表面的至少一部分由盖4a覆盖。实施方式中,盖4a为:合成树脂与弹性体的双层结构。
[0114]
前握把6固定于齿轮外壳4。前握把6具有:左臂部6l,其固定于齿轮外壳4的左部;右臂部6r,其固定于齿轮外壳4的右部;以及桥接部6h,其将左臂部6l的上端部和右臂部6r的上端部连接。桥接部6h配置成:比齿轮外壳4的上表面更靠上方。桥接部6h和齿轮外壳4隔着间隙而对置。前握把6配置于马达外壳2的前侧。作业者能够握住前握把6。
[0115]
在左臂部6l的下端部及右臂部6r的下端部分别设置有螺钉开口6c。在齿轮外壳4的左部及右部分别设置有螺孔16。在前后方向上,螺孔16的位置和旋转输出部5的位置实质上相同。
[0116]
在齿轮外壳4的左部及右部分别设置有螺孔18。螺孔18设置于螺孔16的后方且设置于其下方。
[0117]
蓄电池装配部7配置于手柄外壳3的后部。在蓄电池装配部7装配有蓄电池组17。蓄电池装配部7设置于手柄外壳3的蓄电池连接部3d。本实施方式中,蓄电池装配部7沿着上下方向设置有2个。通过在2个蓄电池装配部7分别装配有蓄电池组17,使得蓄电池组17沿着上下方向配置有2个。蓄电池组17能够相对于蓄电池装配部7而进行拆装。通过装配于蓄电池装配部7,蓄电池组17能够向电动挖掘机1a供电。
[0118]
蓄电池组17包括二次电池。本实施方式中,蓄电池组17包括充电式锂离子电池。蓄电池组17具有解除按钮17c。对解除按钮17c进行操作,能够解除蓄电池装配部7与蓄电池组17之间的固定。解除按钮17c设置于蓄电池组17的左表面。
[0119]
控制器13输出对电动挖掘机1a进行控制的控制信号。控制器收纳部3c具有:能够对控制器13进行收纳的内部空间。控制器13收纳于控制器收纳部3c。
[0120]
主开关10由作业者进行操作,以便启动电动挖掘机1a。主开关10设置于前部3a的上部。通过对主开关10进行操作,从蓄电池组17向控制器13供电,使得电动挖掘机1a启动。通过对主开关10进行操作,从而对电动挖掘机1a的启动和停止进行切换。
[0121]
触发开关11由作业者进行操作,以便启动马达8。触发开关11设置于握把部3b。触发开关11包括触发器杆11a和开关电路11b。触发器杆11a自握把部3b的前部的下部向下方突出。作业者在用左右一只手握住握把部3b的状态下,能够用手指以使得触发器杆11a向上方移动的方式对触发器杆11a进行操作。握把部3b具有:能够对开关电路11b进行收纳的内部空间。开关电路11b收纳于握把部3b。通过对触发器杆11a进行操作,使得开关电路11b输出操作信号。在电动挖掘机1a启动的状态下,对触发器杆11a进行操作而将其向上方拉动,由此从蓄电池组17向马达8供电,马达8启动。马达8基于从开关电路11b输出的操作信号而进行驱动。通过对触发器杆11a的操作和操作解除进行切换,从而对马达8的驱动和停止进行切换。
[0122]
正反转切换杆9由作业者进行操作,以便对马达8的旋转方向进行切换。正反转切
换杆9设置于前部3a。通过在左右方向上对正反转切换杆9进行操作,使得马达8的旋转方向在正转方向和反转方向之间进行切换。通过马达8的旋转方向进行切换,使得旋转输出部5的旋转方向在正转方向和反转方向之间进行切换。
[0123]
速度切换杆15由作业者进行操作,以便对旋转输出部5的旋转速度进行切换。速度切换杆15设置于齿轮外壳4的下部。通过在前后方向上对速度切换杆15进行操作,使得旋转输出部5的旋转速度在第一速度和比第一速度高的第二速度之间进行切换。
[0124]
马达8产生:用于使旋转输出部5旋转的旋转力。马达8基于从蓄电池组17供给来的电力而进行驱动。马达8为内转子型的无刷马达。马达8具有:筒状的定子81、以及配置于定子81的内侧的转子82。转子82的旋转轴ax在前后方向上延伸。
[0125]
定子81具有:定子铁芯81a,其包括层叠着的多个钢板;前侧绝缘子81b,其配置于定子铁芯81a的前部;后侧绝缘子81c,其配置于定子铁芯81a的后部;多个线圈81d,它们经由前侧绝缘子81b及后侧绝缘子81c而被卷绕于定子铁芯81a;传感器电路基板81e,其安装于后侧绝缘子81c;以及接线部件81f,其支撑于后侧绝缘子81c。传感器电路基板81e具有对转子82的旋转进行检测的多个旋转检测元件。
[0126]
转子82具有:转子转轴82a;筒状的转子铁芯82b,其配置于转子转轴82a的周围;以及多个永久磁铁82c,它们保持于转子铁芯82b。转子转轴82a的前部以能够旋转的方式被支撑于轴承83。转子转轴82a的后部以能够旋转的方式被支撑于轴承84。
[0127]
在轴承83与定子81之间的转子转轴82a安装有离心风扇85。马达外壳2的排气口2e配置于离心风扇85周围的一部分。通过转子转轴82a旋转,使得离心风扇85旋转,从而马达外壳2的内部空间的空气经由排气口2e而向马达外壳2的外部空间排出。
[0128]
在转子转轴82a的前端部设置有小齿轮141s。小齿轮141s配置于齿轮外壳4的内部空间。转子转轴82a借助小齿轮141s而与减速机构14连结。
[0129]
减速机构14将马达8产生的旋转力向旋转输出部5传递。减速机构14从转子转轴82a向旋转输出部5传递旋转力。减速机构14包括多个齿轮。减速机构14具有:第一行星齿轮机构141、第二行星齿轮机构142、中间转轴143以及输出转轴144。
[0130]
第一行星齿轮机构141配置于转子转轴82a的前方。中间转轴143配置于第一行星齿轮机构141的前方。第二行星齿轮机构142配置于中间转轴143的前方。输出转轴144配置于第二行星齿轮机构142的前方。
[0131]
第一行星齿轮机构141具有:小齿轮141s,其作为太阳轮发挥作用;多个行星齿轮141p,它们配置于小齿轮141s的周围;第一齿轮架141c,其将多个行星齿轮141p支撑为能够旋转;内齿轮141r,其配置于多个行星齿轮141p的周围;以及支撑销145,其保持于第一齿轮架141c。
[0132]
小齿轮141s设置于转子转轴82a的前端部。多个行星齿轮141p与小齿轮141s及内齿轮141r分别啮合。第一齿轮架141c对支撑销145进行保持。支撑销145在前后方向上延伸。支撑销145与行星齿轮141p连结。第一齿轮架141c借助支撑销145而将行星齿轮141p支撑为能够旋转。
[0133]
第二行星齿轮机构142具有:太阳轮142s;多个行星齿轮142p,它们配置于太阳轮142s的周围;第二齿轮架142c,其将多个行星齿轮142p支撑为能够旋转;内齿轮142r,其配置于多个行星齿轮142p的周围;以及支撑销146,其保持于第二齿轮架142c。
[0134]
太阳轮142s设置于中间转轴143的前端部。多个行星齿轮142p与太阳轮142s及内齿轮142r分别啮合。第二齿轮架142c对支撑销146进行保持。支撑销146在前后方向上延伸。支撑销146从第二齿轮架142c向后方突出。支撑销146将行星齿轮142p支撑为能够旋转。支撑销146的后端部从行星齿轮142p向后方突出。第二齿轮架142c借助支撑销146而将行星齿轮142p支撑为能够旋转。
[0135]
第一行星齿轮机构141的内齿轮141r固定于齿轮外壳4。内齿轮141r不旋转。第二行星齿轮机构142的内齿轮142r能够旋转。
[0136]
输出转轴144以能够旋转的方式被支撑于轴承147。输出转轴144的后端部固定于第二齿轮架142c。在输出转轴144的前端部设置有锥齿轮148。输出转轴144的前端部经由锥齿轮148而与旋转输出部5连结。在第二齿轮架142c进行旋转时,第二齿轮架142c和输出转轴144一起旋转。
[0137]
转子转轴82a的旋转轴ax、第一齿轮架141c的旋转轴、中间转轴143的旋转轴、第二齿轮架142c的旋转轴、以及输出转轴144的旋转轴一致。
[0138]
减速机构14具有:在第一行星齿轮机构141与第二行星齿轮机构142之间能够在前后方向上移动的切换部件150。切换部件150配置于中间转轴143的周围。切换部件150与速度切换杆15连接。通过对速度切换杆15进行操作,使得切换部件150在前后方向上移动。作业者能够对速度切换杆15进行操作而使得切换部件150在前后方向上移动。
[0139]
切换部件150配置于第一齿轮架141c的前方。支撑销145的前部从第一齿轮架141c向前方突出。切换部件150具有:供从第一齿轮架141c向前方突出的支撑销145插入的孔150h。切换部件150能够由支撑销145引导而在前后方向上移动。通过切换部件150在前后方向上移动,从而对旋转输出部5的旋转速度进行切换。
[0140]
另外,减速机构14具有:在行星齿轮142p的后部设置的连接部件151。连接部件151具有:供从行星齿轮142p向后方突出的支撑销146插入的孔151h。连接部件151借助支撑销146而与第二齿轮架142c连结。
[0141]
切换部件150能够在第一位置与比第一位置更靠前方的第二位置之间进行移动。切换部件150能够由支撑销145引导而在第一位置与第二位置之间进行移动。
[0142]
在切换部件150被配置于第一位置的状态下,切换部件150与第一齿轮架141c及中间转轴143分别连结。另外,在切换部件150被配置于第一位置的状态下,切换部件150远离连接部件151。在切换部件150配置于第一位置的状态下,第一齿轮架141c、中间转轴143的后端部以及切换部件150成为一体。在切换部件150被配置于第一位置的状态下,第一齿轮架141c进行旋转时,第一齿轮架141c、中间转轴143以及切换部件150一起旋转。
[0143]
在切换部件150被配置于第二位置的状态下,切换部件150与连接部件151连结。另外,在切换部件150被配置于第二位置的状态下,切换部件150远离第一齿轮架141c及中间转轴143。在切换部件150配置于第二位置的状态下,中间转轴143的后端部和第一齿轮架141c分离。在切换部件150被配置于第二位置的状态下,连接部件151和切换部件150成为一体。支撑销145被配置于切换部件150的孔150h。另外,支撑销145与行星齿轮141p连结。在切换部件150被配置于第二位置的状态下,行星齿轮141p进行公转时,连接部件151和切换部件150一起旋转。
[0144]
在切换部件150被配置于第一位置的状态下,切换部件150和中间转轴143借助花
键连接进行连接。在切换部件150被配置于第二位置的状态下,花键连接解除,切换部件150与中间转轴143的连接得以解除。
[0145]
在切换部件150被配置于第一位置的状态下,当转子转轴82a因马达8的驱动而旋转时,小齿轮141s进行旋转,行星齿轮141p在小齿轮141s的周围进行公转。在切换部件150被配置于第一位置的状态下,第一齿轮架141c、中间转轴143的后端部以及切换部件150成为一体。通过行星齿轮141p的公转,第一齿轮架141c、中间转轴143以及切换部件150以比转子转轴82a的旋转速度低的旋转速度一起旋转。通过中间转轴143的旋转,使得太阳轮142s进行旋转。当太阳轮142s进行旋转时,行星齿轮142p在太阳轮142s的周围进行公转。通过行星齿轮142p的公转,第二齿轮架142c和输出转轴144以比中间转轴143的旋转速度低的旋转速度进行旋转。这样,在切换部件150被配置于第一位置的状态下,当马达8驱动时,同时发挥出第一行星齿轮机构141的减速功能及第二行星齿轮机构142的减速功能,输出转轴144以第一速度进行旋转。
[0146]
在切换部件150被配置于第二位置的状态下,当转子转轴82a因马达8的驱动而进行旋转时,小齿轮141s进行旋转,行星齿轮141p在小齿轮141s的周围进行公转。通过行星齿轮141p的公转,第一齿轮架141c以比转子转轴82a的旋转速度低的旋转速度一起旋转。在切换部件150被配置于第二位置的状态下,切换部件150远离第一齿轮架141c及中间转轴143。在切换部件150被配置于第二位置的状态下,中间转轴143的后端部和第一齿轮架141c分离。在切换部件150被配置于第二位置的状态下,连接部件151和切换部件150呈一体。在切换部件150被配置于第二位置的状态下,支撑销145配置于切换部件150的孔150h。通过行星齿轮141p的公转,连接部件151和切换部件150以与第一齿轮架141c的旋转速度相同的旋转速度进行旋转。通过连接部件151的旋转,行星齿轮142p以与连接部件151的旋转速度相同的公转速度进行公转。通过行星齿轮142p的公转,第二齿轮架142c和输出转轴144以与中间转轴143的旋转速度相同的旋转速度进行旋转。这样,在切换部件150被配置于第二位置的状态下,当马达8驱动时,虽然发挥出第一行星齿轮机构141的减速功能,但是,没有发挥出第二行星齿轮机构142的减速功能,输出转轴144以第二速度进行旋转。
[0147]
旋转输出部5基于经由减速机构14而从马达8传递来的旋转力进行旋转。旋转输出部5自齿轮外壳4的前部向下方突出。在旋转输出部5安装有钻头。旋转输出部5能够以安装有钻头的状态进行旋转。旋转输出部5的旋转轴bx在上下方向上延伸。马达8的旋转轴ax和旋转输出部5的旋转轴bx正交。
[0148]
旋转输出部5包括:主轴51、以及在主轴51的下端部所装配的钻头卡盘52。钻头卡盘52具有供钻头插入的插入孔52a。插入孔52a形成为:从钻头卡盘52的下端部向上方延伸。钻头卡盘52能够以安装有钻头的状态进行旋转。
[0149]
主轴51以能够旋转的方式被支撑于滚针轴承53及滚珠轴承54。滚针轴承53将主轴51的上端部支撑为能够旋转。滚珠轴承54将主轴51的下部支撑为能够旋转。
[0150]
在主轴51的上端部设置有锥齿轮55。锥齿轮55与输出转轴144的锥齿轮148啮合。锥齿轮55的直径大于锥齿轮148的直径。锥齿轮55的齿数多于锥齿轮148的齿数。
[0151]
<动作>
[0152]
接下来,对本实施方式的电动挖掘机1a的动作的一例进行说明。在蓄电池装配部7装配有蓄电池组17的状态下,当对主开关10进行操作时,从蓄电池组17向电动挖掘机1a供
电。在从蓄电池组17向电动挖掘机1a供电的状态下,当对触发开关11进行操作时,从开关电路11b输出操作信号。控制器13基于从开关电路11b输出的操作信号而向马达8供给电流。通过向马达8供给电流,使得转子转轴82a旋转。
[0153]
通过转子转轴82a的旋转,使得第一行星齿轮机构141、中间转轴143及第二行星齿轮机构142分别驱动,输出转轴144进行旋转。输出转轴144的锥齿轮148和主轴51的锥齿轮55啮合。通过输出转轴144的旋转,使得主轴51旋转。通过主轴51的旋转,使得钻头卡盘52旋转。通过钻头卡盘52的旋转,使得安装于钻头卡盘52的钻头旋转。
[0154]
通过转子转轴82a的旋转,使得离心风扇85旋转。通过离心风扇85的旋转,使得空气在马达8的周围流通。通过空气在马达8的周围流通,使得马达8被冷却。在马达8的周围流通的空气从排气口2e排出。
[0155]
<附属装置>
[0156]
图5是表示从前方观察本实施方式的附属装置100的一部分的分解立体图。图6是表示从后方观察本实施方式的附属装置100的一部分的分解立体图。图7是表示从前方观察本实施方式的附属装置100的一部分的立体图。图8是表示从后方观察本实施方式的附属装置100的一部分的立体图。
[0157]
附属装置100装配于电动挖掘机1a。本实施方式中,附属装置100装配于电动挖掘机1a的齿轮外壳4。附属装置100能够相对于电动挖掘机1a的齿轮外壳4而进行拆装。
[0158]
附属装置100具备:相对于齿轮外壳4而进行拆装的辅助手柄20。辅助手柄20接受从旋转输出部5向齿轮外壳4传递的反作用力。辅助手柄20具有:手柄接头21、手柄22、以及反作用力接受部件23。
[0159]
手柄接头21固定于齿轮外壳4。手柄接头21包括:固定于齿轮外壳4的左部的左手柄接头21l、以及固定于齿轮外壳4的右部的右手柄接头21r。
[0160]
手柄22固定于手柄接头21。手柄22配置成:从手柄接头21向前方延伸。手柄22包括:左棒部22l,其从左手柄接头21l向前方延伸;右棒部22r,其从右手柄接头21r向前方延伸;以及连结棒部22c,其将左棒部22l的前端部和右棒部22r的前端部连结。
[0161]
手柄22是将1根管弯曲而制造出的。另外,手柄22可以通过将多个管焊接来制造。手柄22由铝等金属制成。本实施方式中,左棒部22l的前端部、右棒部22r的前端部及连结棒部22c分别由盖22e覆盖。盖22e由合成树脂或橡胶制成。
[0162]
反作用力接受部件23固定于手柄接头21。反作用力接受部件23配置成:在左右方向上,相对于辅助手柄20的中心而言,比手柄接头21更靠外侧(左侧)。反作用力接受部件23包括:固定棒部23a,其在前后方向上延伸;以及伸出棒部23b,其在左右方向上从固定棒部23a的前端部向相对于辅助手柄20的中心而言的外侧(左侧)突出。
[0163]
反作用力接受部件23是将1根管弯曲而制造出的。另外,反作用力接受部件23可以通过将多个管焊接来制造。反作用力接受部件23由铝等金属制成。本实施方式中,固定棒部23a的至少一部分由盖23c覆盖。盖23c由合成树脂或橡胶制成。伸出棒部23b的至少一部分由盖23d覆盖。盖23d由合成树脂或橡胶制成。
[0164]
手柄接头21具有:主体部21a、螺钉凸台部21b、以及螺钉凸台部21c。
[0165]
主体部21a具有:在左右方向上面对辅助手柄20的中心侧的内侧面、以及朝向内侧面的相反侧的外侧面。主体部21a的内侧面与齿轮外壳4对置。
[0166]
螺钉凸台部21b设置成:在左右方向上,从主体部21a的外侧面向相对于辅助手柄20的中心而言的外侧突出。
[0167]
螺钉凸台部21c与主体部21a的后部且是下部连接。
[0168]
主体部21a具有:手柄孔24、内侧凹部25、外侧凹部26、螺孔27、以及螺钉开口28。螺钉凸台部21b具有螺钉开口29。螺钉凸台部21c具有螺钉开口30。
[0169]
手柄孔24形成为:从主体部21a的前端部向后方延伸。左棒部22l的后端部插入于左手柄接头21l的手柄孔24。右棒部22r的后端部插入于右手柄接头21r的手柄孔24。
[0170]
内侧凹部25设置成:将主体部21a的上表面的一部分及主体部21a的内侧面的一部分分别切掉。在内侧凹部25配置有前握把6的至少一部分。在左手柄接头21l的内侧凹部25配置有左臂部6l。在右手柄接头21r的内侧凹部25配置有右臂部6r。
[0171]
外侧凹部26设置于主体部21a的外侧面。外侧凹部26设置成:在左右方向上,从主体部21a的外侧面趋向辅助手柄20的中心而凹陷。外侧凹部26设置成:在前后方向上延伸。在外侧凹部26配置有固定棒部23a的一部分。
[0172]
将在前后方向上延伸的虚拟轴设定为前后轴的情况下,在与前后轴正交的面内,外侧凹部26的内表面为:趋向辅助手柄20的左右方向上的中心而凹陷的圆弧状。在与前后轴正交的面内,与外侧凹部26的内表面对置的固定棒部23a的外表面为:趋向辅助手柄20的左右方向上的中心而鼓出的圆弧状。外侧凹部26的内表面和固定棒部23a的外表面接触。
[0173]
螺孔27设置于外侧凹部26。螺孔27在外侧凹部26沿着前后方向空开间隔设置有2个。在固定棒部23a及盖23c设置有螺钉开口23e。螺钉开口23e沿着前后方向空开间隔设置有5个。在外侧凹部26配置有固定棒部23a的状态下,螺钉31经由螺钉开口23e而插入于螺孔27。据此,手柄接头21和反作用力接受部件23借助螺钉31而被固定。
[0174]
螺钉31沿着前后方向配置有2个。通过对供螺钉31插入的螺钉开口23e进行选择,能够调整反作用力接受部件23的前后方向上的位置。
[0175]
反作用力接受部件23固定于左手柄接头21l及右手柄接头21r中的一个手柄接头21。在将左手柄接头21l和反作用力接受部件23固定的情况下,固定棒部23a被配置于左手柄接头21l的外侧凹部26的状态下,固定棒部23a和左手柄接头21l借助螺钉31而被固定。在将右手柄接头21r和反作用力接受部件23固定的情况下,固定棒部23a被配置于右手柄接头21r的外侧凹部26的状态下,固定棒部23a和右手柄接头21r借助螺钉31而被固定。
[0176]
图5及图6示出了手柄接头21和反作用力接受部件23分离的状态。图7及图8示出了左手柄接头21l和反作用力接受部件23借助螺钉31而被固定的状态。
[0177]
螺钉开口29在螺钉凸台部21b沿着前后方向空开间隔设置有2个。螺钉开口29形成为:与手柄孔24的内表面连结。将手柄接头21和手柄22固定的螺钉32被插入于螺钉开口29。螺钉32沿着前后方向配置有2个。插入于螺钉开口29的螺钉32被插入于:在手柄22的至少一部分所设置的螺孔。手柄接头21和手柄22借助螺钉32而被固定。插入于左手柄接头21l的螺钉开口29的螺钉32被插入于:在左棒部22l所设置的螺孔,由此将左手柄接头21l和左棒部22l固定。插入于右手柄接头21r的螺钉开口29的螺钉32被插入于:在右棒部22r所设置的螺孔,由此将右手柄接头21r和右棒部22r固定。
[0178]
图9是表示从前方观察装配有本实施方式的附属装置100的一部分的电动挖掘机1a的立体图。图10是表示从后方观察装配有本实施方式的附属装置100的一部分的电动挖
掘机1a的立体图。图11是表示从前方观察装配有本实施方式的附属装置100的一部分的电动挖掘机1a的立体图。
[0179]
图12是表示从后方观察装配有本实施方式的附属装置100的一部分的电动挖掘机1a的立体图。图9及图10分别示出了:在手柄接头21固定有手柄22但未固定反作用力接受部件23的状态下的辅助手柄20被装配于电动挖掘机1a的状态。图11及图12分别示出了:在手柄接头21固定有手柄22及反作用力接受部件23的状态下的辅助手柄20被装配于电动挖掘机1a的状态。
[0180]
螺钉开口28在主体部21a,被设置于螺钉凸台部21b的后侧。夹着前握把6而将手柄接头21和齿轮外壳4固定的螺钉33被插入于螺钉开口28。插入于螺钉开口28的螺钉33经由参照图1至图3说明的前握把6的螺钉开口6c而被插入于齿轮外壳4的螺孔16。手柄接头21和齿轮外壳4夹着前握把6而由螺钉33固定。插入于左手柄接头21l的螺钉开口28的螺钉33经由左臂部6l的螺钉开口6c而被插入于齿轮外壳4的左部的螺孔16,由此将左手柄接头21l和齿轮外壳4的左部固定。插入于右手柄接头21r的螺钉开口28的螺钉33经由右臂部6r的螺钉开口6c而被插入于齿轮外壳4的右部的螺孔16,由此将右手柄接头21r和齿轮外壳4的右部固定。
[0181]
螺钉开口30设置于螺钉凸台部21c。将手柄接头21和齿轮外壳4固定的螺钉34被插入于螺钉开口30。插入于螺钉开口30的螺钉34被插入于参照图3等说明的齿轮外壳4的螺孔18。手柄接头21和齿轮外壳4借助螺钉34而被固定。插入于左手柄接头21l的螺钉开口30的螺钉34被插入于齿轮外壳4的左部的螺孔18,由此将左手柄接头21l和齿轮外壳4的左部固定。插入于右手柄接头21r的螺钉开口30的螺钉34被插入于齿轮外壳4的右部的螺孔18,由此将右手柄接头21r和齿轮外壳4的右部固定。
[0182]
<辅助杆>
[0183]
图13是表示从前方观察装配有本实施方式的附属装置100的电动挖掘机1a的立体图。图14是表示从后方观察装配有本实施方式的附属装置100的电动挖掘机1a的立体图。图15是表示装配有本实施方式的附属装置100的电动挖掘机1a的左视图。图16是表示装配有本实施方式的附属装置100的电动挖掘机1a的右视图。图17是表示装配有本实施方式的附属装置100的电动挖掘机1a的俯视图。图18是表示装配有本实施方式的附属装置100的电动挖掘机1a的仰视图。图19是表示装配有本实施方式的附属装置100的电动挖掘机1a的后视图。图20是表示装配有本实施方式的附属装置100的电动挖掘机1a的主视图。
[0184]
如图13至图20所示,在旋转输出部5安装有钻头19。钻头19为称之为挖坑机钻头的地面挖掘用钻头。钻头19具有:挖掘转轴19a、挖掘刃19b、前端钻19c、以及切削钻19d。
[0185]
挖掘转轴19a沿着上下方向配置。在旋转输出部5安装钻头19的情况下,如图9至图12所示,转接器5a插入于钻头卡盘52的插入孔52a。转接器5a为棒状部件。在挖掘转轴19a的上端部设置有:供转接器5a插入的孔。在挖掘转轴19a的上端部的孔插入有转接器5a的状态下,挖掘转轴19a的上端部和转接器5a借助固定件5b而被固定。挖掘转轴19a的上端部借助转接器5a而被安装于钻头卡盘52。
[0186]
挖掘刃19b呈螺旋状而被配置于挖掘转轴19a的周围。挖掘刃19b固定于挖掘转轴19a。
[0187]
前端钻19c配置于挖掘转轴19a的下端部。
[0188]
切削钻19d配置于挖掘刃19b的下端部。
[0189]
如图11及图12所示,附属装置100具备:相对于齿轮外壳4而进行拆装的辅助手柄20。辅助手柄20具有:左手柄接头21l、右手柄接头21r、手柄22、以及反作用力接受部件23。
[0190]
如图13至图20所示,附属装置100还具备辅助杆40。辅助杆40在与钻头19相邻的位置沿着上下方向配置。
[0191]
图21是表示本实施方式的辅助杆40的分解立体图。如图13至图21所示,辅助杆40具有:管部40a、脚部40b、以及帽部40c。
[0192]
管部40a由笔直状的金属制的管形成。管部40a沿着上下方向配置。管部40a与挖掘转轴19a平行地配置。在管部40a设置有螺钉开口40d。螺钉开口40d沿着上下方向空开间隔设置有2个。
[0193]
脚部40b装配于管部40a的下端部。脚部40b配置成:将管部40a的下端部的开口封堵。脚部40b由橡胶制成。如图21所示,脚部40b具有:插塞部40e,其插入于管部40a的下端部的开口;以及凸缘部40f,其与插塞部40e的下端部连接。凸缘部40f的外径大于管部40a的外径。
[0194]
帽部40c装配于管部40a的上端部。帽部40c配置成:将管部40a的上端部的开口封堵。帽部40c的至少一部分插入于管部40a的上端部的开口。帽部40c由橡胶制成。
[0195]
辅助杆40的下端部40u配置成:比钻头19的下端部19u更靠上方。通过钻头19旋转而在地面形成出孔。辅助杆40的下端部40u与由钻头19形成的孔的周围的地面接触,由此以使得孔的深度为目标深度的方式辅助电动挖掘机1a的挖掘作业。
[0196]
附属装置100还具备:相对于辅助手柄20的至少一部分而进行拆装的保持部件41。辅助杆40保持于保持部件41。保持部件41固定于手柄接头21。辅助杆40借助保持部件41而被支撑于手柄接头21。
[0197]
保持部件41固定于左手柄接头21l及右手柄接头21r中的一个手柄接头21。图13至图20所示的例子中,在左手柄接头21l固定有反作用力接受部件23。保持部件41固定于右手柄接头21r。辅助杆40借助保持部件41而被支撑于右手柄接头21r。
[0198]
保持部件41在前后方向上延伸。在右手柄接头21r的外侧凹部26配置有保持部件41的一部分。
[0199]
如上所述,在与前后轴正交的面内,外侧凹部26的内表面为:趋向辅助手柄20的左右方向上的中心而凹陷的圆弧状。在与前后轴正交的面内,与外侧凹部26的内表面对置的保持部件41的外表面为:趋向辅助手柄20的左右方向上的中心而鼓出的圆弧状。外侧凹部26的内表面和保持部件41的外表面接触。
[0200]
如上所述,右手柄接头21r具有:在外侧凹部26所设置的螺孔27。螺孔27在外侧凹部26沿着前后方向空开间隔设置有2个。保持部件41具有:沿着前后方向空开间隔设置的多个螺钉开口42。螺钉开口42沿着前后方向空开间隔设置有6个。在外侧凹部26配置有保持部件41的状态下,螺钉35经由螺钉开口42而被插入于螺孔27。据此,右手柄接头21r和保持部件41借助螺钉35而被固定。
[0201]
螺钉35沿着前后方向配置有2个。通过对供螺钉35插入的螺钉开口42进行选择,能够调整保持部件41及保持于保持部件41的辅助杆40的前后方向上的位置。
[0202]
图22是表示本实施方式的辅助杆40及保持部件41的立体图。保持部件41具有:以
能够拆装的方式对辅助杆40进行保持的保持机构43。
[0203]
保持机构43具有:夹紧部44,其配置于辅助杆40的周围的至少一部分;以及杆46,其借助铰链45而与夹紧部44连结。
[0204]
夹紧部44能够将辅助杆40固定。夹紧部44设置于保持部件41的前端部。夹紧部44具有:圆弧部44a、板部44b、以及板部44c。本实施方式中,夹紧部44为保持部件41的一部分。圆弧部44a配置于管部40a的周围的一部分。板部44b设置于圆弧部44a的一端部。板部44c设置于圆弧部44a的另一端部。板部44b和板部44c隔着间隙而对置。板部44b和板部44c借助螺钉47而连结。
[0205]
杆46借助铰链45而与夹紧部44连结。杆46借助铰链45而以能够转动的方式被支撑于夹紧部44。杆46由作业者进行操作,以便利用夹紧部44而将辅助杆40固定。杆46具有:与夹紧部44的板部44b接触的凸轮部。通过沿着图22的箭头所示的紧固方向ya转动杆46,将辅助杆40的管部40a紧固于夹紧部44,辅助杆40固定于夹紧部44。即,辅助杆40固定于保持部件41的前端部。通过沿着图22的箭头所示的松弛方向yb转动杆46,将夹紧部44对辅助杆40的固定予以解除。通过辅助杆40的固定被解除,作业者能够相对于夹紧部44而将辅助杆40在上下方向上进行移动。作业者能够调整辅助杆40相对于保持部件41的上下方向上的位置。
[0206]
<使用方法>
[0207]
接下来,对本实施方式的电动挖掘机1a的使用方法进行说明。图23是用于说明装配有本实施方式的附属装置100的电动挖掘机1a的使用方法的侧视图。图24是用于说明装配有本实施方式的附属装置100的电动挖掘机1a的使用方法的俯视图。如图23及图24所示,利用电动挖掘机1a对地面进行挖掘的情况下,在旋转输出部5安装有钻头19,在齿轮外壳4安装有附属装置100。
[0208]
作业者用左手握住手柄22的连结棒部22c,用右手握住手柄外壳3的握把部3b。另外,作业者使反作用力接受部件23的伸出棒部23b与身体的左部接触。作业者使伸出棒部23b与左侧腹、左腰及左腿的大腿部中的至少一者接触。
[0209]
作业者用把持握把部3b的右手的手指对触发器杆11a进行操作。通过对触发器杆11a进行操作,使得旋转输出部5以安装有钻头19的状态沿着图24的箭头所示的规定方向ra进行旋转。
[0210]
作业者将辅助手柄20及电动挖掘机1a向下方按,将旋转的钻头19按压于地面。通过旋转的钻头19被按压于地面,使得地面被挖掘,在地面形成出孔。作业者可以用左手将手柄22向下方按,也可以用右手将握把部3b向下方按。另外,作业者可以用肚子将前握把6向下方按。通过将前握把6向下方按,使得齿轮外壳4被按到下方。
[0211]
在地面挖掘中,有可能存在较大的反作用力vr朝向图23的箭头所示的上方而经由钻头19及旋转输出部5从而作用于齿轮外壳4。另外,有可能存在较大的反作用力hr趋向与图24的箭头所示的规定方向ra相反方向而经由钻头19及旋转输出部5从而作用于齿轮外壳4。
[0212]
另外,在地面挖掘中,当钻头19碰到像岩石那样的较硬异物时,有可能存在过大的反作用力急剧作用于齿轮外壳4。如果存在较大的反作用力作用于齿轮外壳4,则有可能电动挖掘机1a的姿态不稳定、或者把持电动挖掘机1a的作业者被摇晃。其结果,有可能很难在
地面形成出目标孔。
[0213]
本实施方式中,用于接受从旋转输出部5向齿轮外壳4传递的反作用力的辅助手柄20被装配于电动挖掘机1a。辅助手柄20具备:用于接受从旋转输出部5向齿轮外壳4传递的反作用力的手柄22及反作用力接受部件23。
[0214]
连结棒部22c由作业者的左手握着,由此能够接受与旋转输出部5的旋转轴bx平行的上下方向上的反作用力vr及旋转输出部5的旋转方向上的反作用力hr。
[0215]
握把部3b由作业者的右手握着,由此能够接受与旋转输出部5的旋转轴bx平行的上下方向上的反作用力vr及旋转输出部5的旋转方向上的反作用力hr。
[0216]
伸出棒部23b与作业者的身体接触,由此能够接受旋转输出部5的旋转方向上的反作用力hr。
[0217]
连结棒部22c配置于齿轮外壳4的前方。握把部3b配置于齿轮外壳4的后方。伸出棒部23b配置于齿轮外壳4的侧方。由作业者的左手握着的连结棒部22c远离旋转输出部5。由作业者的右手握着的握把部3b远离旋转输出部5。与作业者的身体接触的伸出棒部23b远离旋转输出部5。
[0218]
如图23所示,传递至齿轮外壳4的上方向的反作用力vr向连结棒部22c、握把部3b及前握把6分别分散。由于传递至齿轮外壳4的反作用力vr向连结棒部22c、握把部3b及前握把6分别分散,所以被分散的反作用力vr向作业者传递。因此,即便有较大的反作用力vr作用于齿轮外壳4,电动挖掘机1a的姿态不稳定、或者保持电动挖掘机1a的作业者被摇晃的情形也会得以抑制。
[0219]
另外,如图24所示,传递至齿轮外壳4的旋转方向上的反作用力hr向连结棒部22c、握把部3b及伸出棒部23b分别分散。由于传递至齿轮外壳4的反作用力hr向连结棒部22c、握把部3b及伸出棒部23b分别分散,所以,被分散的反作用力hr向作业者传递。因此,即便有较大的反作用力vr作用于齿轮外壳4,电动挖掘机1a的姿态不稳定、或者保持电动挖掘机1a的作业者被摇晃的情形也会得以抑制。
[0220]
本实施方式中,附属装置100具备:在与钻头19相邻的位置沿着上下方向配置的辅助杆40。辅助杆40的下端部40u配置成:比钻头19的下端部19u更靠上方。挖掘刃19b的下端部与钻头19的下端部19u之间的上下方向上的距离δd由在地面形成的孔的目标深度决定。作业者实施电动挖掘机1a的挖掘作业,直至辅助杆40的下端部40u与由钻头19形成的孔的周围的地面接触为止。通过实施电动挖掘机1a的挖掘作业,直至辅助杆40的下端部40u与由钻头19形成的孔的周围的地面接触为止,从而在地面形成出目标深度的孔。
[0221]
挖掘作业结束的情况下,作业者可以用手握住手柄22、反作用力接受部件23、握把部3b及前握把6中的至少一者,将电动挖掘机1a向上方提起。通过将电动挖掘机1a向上方提起,能够将钻头19从在地面所形成的孔中拔出。
[0222]
<效果>
[0223]
如以上所说明,本实施方式中,附属装置100装配于电动挖掘机1a。电动挖掘机1a具备:马达外壳2,该马达外壳2对马达8进行收纳;手柄外壳3,该手柄外壳3配置于马达外壳2的后侧,且具有设置有用于启动马达8的触发开关11的握把部3b;齿轮外壳4,该齿轮外壳4配置于马达外壳2的前侧,用于对齿轮进行收纳;以及旋转输出部5,该旋转输出部5自齿轮外壳4向下方突出,且安装有钻头19。附属装置100具备辅助杆40,该辅助杆40在与钻头19相
邻的位置沿着上下方向配置。
[0224]
上述构成中,辅助杆40能够辅助挖掘作业,以便在作为挖掘对象的地面形成目标孔。通过钻头19旋转,从而在地面形成出孔。通过辅助杆40与由钻头19形成的孔的周围的地面接触,从而在地面形成出目标孔。
[0225]
本实施方式中,辅助杆40的下端部40u配置成:比钻头19的下端部19u更靠上方。
[0226]
上述构成中,通过辅助杆40的下端部40u配置成比钻头19的下端部19u更靠上方,从而在地面形成目标深度的孔。挖掘刃19b的下端部与钻头19的下端部19u之间的上下方向上的距离δd由孔的目标深度决定,通过实施挖掘作业,直至辅助杆40的下端部40u与由钻头19形成的孔的周围的地面接触为止,从而在地面形成出目标深度的孔。
[0227]
本实施方式中,附属装置100具备:辅助手柄20,该辅助手柄20相对于齿轮外壳4而进行拆装;以及保持部件41,该保持部件41相对于辅助手柄20的至少一部分而进行拆装。辅助杆40保持于保持部件41。
[0228]
上述构成中,辅助手柄20由作业者的手把握,由此能够顺利地实施挖掘作业。辅助杆40借助保持部件41而被支撑于辅助手柄20,因此,作业者能够用手握着辅助手柄20而在地面形成出目标深度的孔。
[0229]
本实施方式中,保持部件41具有以能够拆装的方式对辅助杆40进行保持的保持机构43。保持机构43具有:夹紧部44,该夹紧部44配置于辅助杆40的周围的至少一部分;以及杆46,该杆46借助铰链45而与夹紧部44连结。通过杆46沿着紧固方向ya转动,使得辅助杆40固定于夹紧部44。通过杆46沿着松弛方向yb转动,使得夹紧部44对辅助杆40的固定得以解除。
[0230]
上述构成中,通过杆46沿着紧固方向ya转动,能够固定辅助杆40相对于保持部件41的上下方向上的位置。通过杆46沿着松弛方向yb转动,能够调整辅助杆40相对于保持部件41的上下方向上的位置。
[0231]
本实施方式中,辅助手柄20具有:固定于齿轮外壳4的手柄接头21、以及固定于手柄接头21的手柄22。保持部件41固定于手柄接头21。
[0232]
上述构成中,保持部件41借助手柄接头21而被固定于齿轮外壳4。作业者能够用手握着手柄22。
[0233]
本实施方式中,手柄接头21包括:固定于齿轮外壳4的左部的左手柄接头21l、以及固定于齿轮外壳4的右部的右手柄接头21r。在右手柄接头21r固定有保持部件41,在左手柄接头21l固定有反作用力接受部件23。
[0234]
上述构成中,作业者能够借助反作用力接受部件23接受从旋转输出部5向齿轮外壳4传递的反作用力。据此,电动挖掘机1a的姿态不稳定、或者保持电动挖掘机1a的作业者被摇晃的情形得以抑制。因此,在地面形成出目标孔。另外,由于辅助杆40与反作用力接受部件23之间的干扰得以抑制,所以,能够顺利地实施挖掘作业。
[0235]
另外,本实施方式中,可以在右手柄接头21r固定有反作用力接受部件23,在左手柄接头21l固定有保持部件41。
[0236]
本实施方式中,手柄接头21具有螺孔27。保持部件41具有:沿着前后方向空开间隔设置的多个螺钉开口42。通过螺钉35经由螺钉开口42而被插入于螺孔27,将手柄接头21和保持部件41固定。通过对供螺钉35插入的螺钉开口42进行选择,能够调整辅助杆40的前后
方向上的位置。
[0237]
上述构成中,辅助杆40的前后方向上的位置得以简单调整。根据作业现场的状况,能够适当地调整钻头19与辅助杆40之间的前后方向上的距离。
[0238]
另外,本实施方式中,可以将在马达外壳2的左手侧(前侧)所配置的手柄22视为由作业者的左手握住的第一握把部,将在马达外壳2的右手侧(后侧)所配置的握把部3b视为第二握把部。
[0239]
上述构成中,作业者能够以将在旋转输出部5的前侧所配置的第一握把部及在旋转输出部5的后侧所配置的第二握把部分别握住的状态,能够顺利地实施挖掘作业。
[0240]
另外,本实施方式中,辅助杆40借助保持部件41而被安装于齿轮外壳4。辅助杆40可以安装于马达外壳2,也可以安装于手柄外壳3。通过辅助杆40安装于电动挖掘机1a的适当部位,使得辅助杆40妨碍挖掘作业的情形得以抑制。
[0241]
[第二实施方式]
[0242]
对第二实施方式进行说明。在以下说明中,对与上述实施方式相同或等同的构成要素标记相同的符号,并将该构成要素的说明简化或省略。
[0243]
图25是表示从前方观察装配有本实施方式的附属装置101的电动挖掘机1a的立体图。图26是表示从后方观察装配有本实施方式的附属装置101的电动挖掘机1a的立体图。图27是表示装配有本实施方式的附属装置101的电动挖掘机1a的左视图。图28是表示装配有本实施方式的附属装置101的电动挖掘机1a的右视图。图29是表示装配有本实施方式的附属装置101的电动挖掘机1a的俯视图。图30是表示装配有本实施方式的附属装置101的电动挖掘机1a的仰视图。图31是表示装配有本实施方式的附属装置101的电动挖掘机1a的后视图。图32是表示装配有本实施方式的附属装置101的电动挖掘机1a的主视图。
[0244]
与上述实施方式同样地,附属装置101具备辅助手柄20。辅助手柄20具有:手柄接头21、手柄22、以及反作用力接受部件23,该手柄接头21包括:左手柄接头21l、以及右手柄接头21r。
[0245]
与上述实施方式同样地,附属装置101具备辅助杆40。辅助杆40在与钻头19相邻的位置沿着上下方向配置。反作用力接受部件23固定于左手柄接头21l。本实施方式中,没有在右手柄接头21r固定有保持部件41。
[0246]
附属装置101具备:相对于辅助手柄20的至少一部分而进行拆装的保持部件60。辅助杆40保持于保持部件60。本实施方式中,保持部件60固定于手柄22。保持部件60在左右方向上延伸。辅助杆40借助保持部件60而被支撑于手柄22。
[0247]
图33是表示本实施方式的辅助杆40及保持部件60的立体图。图34是表示本实施方式的辅助杆40及保持部件60的截面图,相当于图33的a-a线截面箭头视图。
[0248]
保持部件60包括:第一保持部件61、以及配置成比第一保持部件61更靠下方的第二保持部件62。第一保持部件61为左右方向上较长的板状部件。第二保持部件62为:左右方向上较长的板状部件。第一保持部件61具有上表面61a和下表面61b。第二保持部件62具有上表面62a和下表面62b。第一保持部件61的下表面61b和第二保持部件62的上表面62a对置。第一保持部件61和第二保持部件62配置成:将手柄22从上下方向夹持。
[0249]
保持部件60固定于左棒部22l及右棒部22r。第一保持部件61和第二保持部件62配置成:将左棒部22l及右棒部22r分别从上下方向夹持。
[0250]
在第一保持部件61的下表面61b设置有凹部61l及凹部61r。凹部61l及凹部61r分别设置成:从下表面61b向上方凹陷。凹部61l和凹部61r在左右方向上空开间隔设置。凹部61r设置成:比凹部61l更靠右侧。在凹部61l配置有左棒部22l的一部分。在凹部61r配置有右棒部22r的一部分。
[0251]
在第二保持部件62的上表面62a设置有凹部62l及凹部62r。凹部62l及凹部62r分别设置成:从上表面62a向下方凹陷。凹部62l和凹部62r在左右方向上空开间隔设置。凹部62r设置成:比凹部62l更靠右侧。在凹部62l配置有左棒部22l的一部分。在凹部62r配置有右棒部22r的一部分。
[0252]
在以前后方向上延伸的虚拟轴为前后轴的情况下,在与前后轴正交的面内,凹部61l的内表面及凹部61r的内表面分别为:从下表面61b趋向上方而凹陷的圆弧状。在与前后轴正交的面内,与凹部61l的内表面对置的左棒部22l的外表面及与凹部61r的内表面对置的右棒部22r的外表面分别为:趋向上方而鼓出的圆弧状。凹部61l的内表面和左棒部22l的外表面接触。凹部61r的内表面和右棒部22r的外表面接触。
[0253]
在与前后轴正交的面内,凹部62l的内表面及凹部62r的内表面分别为:从上表面62a趋向下方而凹陷的圆弧状。在与前后轴正交的面内,与凹部62l的内表面对置的左棒部22l的外表面及与凹部62r的内表面对置的右棒部22r的外表面分别为:趋向下方而鼓出的圆弧状。凹部62l的内表面和左棒部22l的外表面接触。凹部62r的内表面和右棒部22r的外表面接触。
[0254]
第一保持部件61具有螺钉开口63。第二保持部件62具有螺孔64。通过螺钉65经由螺钉开口63而被插入于螺孔64,使得手柄22被第一保持部件61和第二保持部件62夹持,第一保持部件61和第二保持部件62将手柄22固定。
[0255]
第一保持部件61具有:供辅助杆40的管部40a配置的保持孔61h。第二保持部件62具有:供辅助杆40的管部40a配置的保持孔62h。保持孔61h设置成:比凹部61r更靠右侧。保持孔62h设置成:比凹部62r更靠右侧。
[0256]
本实施方式中,螺钉开口63及螺孔64分别沿着左右方向空开间隔设置有5个。螺钉65沿着左右方向设置有5个。螺钉65包括:螺钉65a、螺钉65b、螺钉65c、螺钉65d以及螺钉65e。在左右方向上,螺钉65a和螺钉65b配置于左棒部22l的两侧。在左右方向上,螺钉65c和螺钉65d配置于右棒部22r的两侧。在左右方向上,螺钉65d和螺钉65e配置于管部40a的两侧。
[0257]
通过利用螺钉65实现的第一保持部件61和第二保持部件62对手柄22的固定被解除,能够调整前后方向上的保持部件60及由保持部件60保持的辅助杆40的位置。
[0258]
保持部件60具有:以能够拆装的方式对辅助杆40进行保持的保持机构73。
[0259]
保持机构73具有:夹紧部74,其配置于辅助杆40的周围的至少一部分;以及杆76,其借助铰链75而与夹紧部74连结。
[0260]
夹紧部74能够将辅助杆40固定。夹紧部74设置于第二保持部件62的右端部的下部。夹紧部74具有:圆弧部74a、板部74b、以及板部74c。本实施方式中,夹紧部74为:第二保持部件62的一部分。圆弧部74a配置于管部40a的周围的一部分。板部74b设置于圆弧部74a的一端部。板部74c设置于圆弧部74a的另一端部。板部74b和板部74c隔着间隙而对置。板部74b和板部74c借助螺钉77而连结。
[0261]
杆76借助铰链75而与夹紧部74连结。杆76借助铰链75而以能够转动的方式被支撑于夹紧部74。杆76由作业者进行操作,以利用夹紧部74而将辅助杆40固定。杆76具有:与夹紧部74的板部74c接触的凸轮部。通过沿着图33的箭头所示的紧固方向yc转动杆76,使得辅助杆40的管部40a紧固于夹紧部74,辅助杆40被固定于夹紧部74。即,辅助杆40被固定于第二保持部件62的右端部。通过沿着图33的箭头所示的松弛方向yd转动杆76,使得辅助杆40的固定得以解除。通过辅助杆40的固定解除,作业者能够相对于夹紧部74而将辅助杆40在上下方向上进行移动。作业者能够调整辅助杆40相对于保持部件60的上下方向上的位置。
[0262]
本实施方式中,在左右方向上,相对于辅助手柄20的中心而言,在比右手柄接头21r更靠外侧(右侧)的位置配置有辅助杆40,在左手柄接头21l固定有反作用力接受部件23。
[0263]
图35是表示从前方观察本实施方式的附属装置101及电动挖掘机1a的立体图。图36是表示本实施方式的附属装置101及电动挖掘机1a的右视图。
[0264]
如上所述,本实施方式中,没有在右手柄接头21r固定保持部件41。本实施方式中,不使用辅助杆40的情况下,辅助杆40固定于右手柄接头21r。
[0265]
如图35及图36所示,辅助杆40的管部40a配置于右手柄接头21r的外侧凹部26。在右手柄接头21r的外侧凹部26所配置的管部40a由右手柄接头21r和盖66夹持。在盖66设置有螺钉开口67。螺钉开口67沿着前后方向空开间隔设置有2个。如上所述,在外侧凹部26设置有螺孔27,在管部40a设置有螺钉开口40d。插入于盖66的螺钉开口67及管部40a的螺钉开口40d的螺钉36被插入于螺孔27。据此,管部40a以由盖66和右手柄接头21r夹持的状态,借助螺钉36而被固定于右手柄接头21r。
[0266]
如以上所说明,本实施方式中,辅助手柄20具有:固定于齿轮外壳4的手柄接头21、以及固定于手柄接头21的手柄22。保持部件60固定于手柄22。
[0267]
上述构成中,保持部件60借助手柄22及手柄接头21而被固定于齿轮外壳4。
[0268]
本实施方式中,保持部件60包括:第一保持部件61、以及配置成比第一保持部件61更靠下方的第二保持部件62。第一保持部件61和第二保持部件62配置成:将手柄22从上下方向夹持。
[0269]
上述构成中,第一保持部件61和第二保持部件62配置成:将手柄22从上下方向夹持,因此,保持部件60与手柄22的固定呈现稳定。
[0270]
本实施方式中,第一保持部件61具有螺钉开口63。第二保持部件62具有螺孔64。通过螺钉65经由螺钉开口63而被插入于螺孔64,使得第一保持部件61、第二保持部件62以及手柄22固定。
[0271]
上述构成中,利用螺钉65,将第一保持部件61、第二保持部件62以及手柄22固定。
[0272]
另外,本实施方式中,第二保持部件62可以具有螺钉开口63,第一保持部件61可以具有螺孔64。
[0273]
本实施方式中,手柄22配置成:从手柄接头21向前方延伸。通过利用螺钉65实现的第一保持部件61和第二保持部件62对手柄22的固定被解除,能够调整前后方向上的辅助杆40的位置。
[0274]
上述构成中,辅助杆40的前后方向上的位置得以简单调整。根据作业现场的状况,能够适当地调整钻头19与辅助杆40之间的前后方向上的距离。
[0275]
本实施方式中,手柄接头21包括:固定于齿轮外壳4的左部的左手柄接头21l、以及固定于齿轮外壳4的右部的右手柄接头21r。手柄22包括:从左手柄接头21l向前方延伸的左棒部22l、从右手柄接头21r向前方延伸的右棒部22r、以及将左棒部22l的前端部和右棒部22r的前端部连结的连结棒部22c。保持部件60分别固定于左棒部22l及右棒部22r。在左右方向上,在比右手柄接头21r更靠外侧(右侧)的位置配置有辅助杆40,在左手柄接头21l固定有反作用力接受部件23。
[0276]
上述构成中,保持部件60固定于左棒部22l及右棒部22r,因此,保持部件60与手柄22的固定稳定。作业者能够借助反作用力接受部件23而接受从旋转输出部5向齿轮外壳4传递的反作用力。据此,电动挖掘机1a的姿态不稳定、或者保持电动挖掘机1a的作业者被摇晃的情形得以抑制。因此,在地面形成出目标孔。另外,辅助杆40与反作用力接受部件23之间的干扰得以抑制,所以,能够顺利地实施挖掘作业。
[0277]
另外,本实施方式中,可以在左右方向上,在比左手柄接头21l更靠外侧(左侧)的位置配置有辅助杆40,在右手柄接头21r固定有反作用力接受部件23。
[0278]
图37是表示从前方观察本实施方式的辅助杆40及保持部件60的变形例的立体图。图25至图34所示的例子中,在左右方向上,相对于辅助手柄20的中心而言,在比手柄22更靠外侧的位置配置有辅助杆40。如图37所示,辅助杆40可以在左右方向上配置于左棒部22l与右棒部22r之间。
[0279]
[第三实施方式]
[0280]
对第三实施方式进行说明。在以下说明中,对与上述实施方式相同或等同的构成要素标记相同的符号,并将该构成要素的说明简化或省略。
[0281]
图38是表示从前方观察配置有本实施方式的附属装置102的电动挖掘机1a的立体图。图39是表示从后方观察配置有本实施方式的附属装置102的电动挖掘机1a的立体图。图40是表示配置有本实施方式的附属装置102的电动挖掘机1a的左视图。图41是表示配置有本实施方式的附属装置102的电动挖掘机1a的右视图。图42是表示配置有本实施方式的附属装置102的电动挖掘机1a的俯视图。图43是表示配置有本实施方式的附属装置102的电动挖掘机1a的仰视图。图44是表示配置有本实施方式的附属装置102的电动挖掘机1a的后视图。图45是表示配置有本实施方式的附属装置102的电动挖掘机1a的主视图。
[0282]
附属装置102具备辅助手柄20。本实施方式中,辅助手柄20如参照图9及图10所说明那样具有手柄接头21和手柄22,但不具有反作用力接受部件23,该手柄接头21包括:左手柄接头21l、以及右手柄接头21r。
[0283]
与上述实施方式同样地,附属装置102具备辅助杆40。辅助杆40在与钻头19相邻的位置沿着上下方向配置。反作用力接受部件23固定于左手柄接头21l。本实施方式中,没有在右手柄接头21r固定有保持部件41。
[0284]
附属装置102具备辅助板90,该辅助板90配置于齿轮外壳4的左侧,接受从旋转输出部5向齿轮外壳4传递的反作用力。辅助板90固定于辅助手柄20的至少一部分。
[0285]
本实施方式中,辅助板90固定于左手柄接头21l。辅助板90具有螺钉开口91。螺钉开口91沿着前后方向空开间隔设置有2个。如上所述,左手柄接头21l具有:在外侧凹部26所设置的螺孔27。通过插入于螺钉开口91的螺钉37被插入于螺孔27,使得辅助板90借助螺钉37而被固定于左手柄接头21l。
[0286]
辅助板90具有:供螺钉凸台部21b配置的开口92、设置成比开口92更靠前方的狭缝开口93、以及设置成比开口92更靠后方的开口94。
[0287]
通过螺钉凸台部21b配置于开口92,从而将辅助板90和左手柄接头21l进行定位。本实施方式中,螺钉凸台部21b及开口92作为将辅助板90和左手柄接头21l进行定位的定位机构发挥作用。
[0288]
狭缝开口93沿着上下方向配置有2个。例如与左棒部22l连结的扎带插入于狭缝开口93。利用扎带而将左棒部22l和辅助板90的前部固定。
[0289]
开口94将螺钉33对准。
[0290]
在辅助板90固定于左手柄接头21l的状态下,辅助板90的前端部90a配置成:比齿轮外壳4的前端部更靠前方。另外,辅助板90的前端部90a配置成:比手柄22的前端部即连结棒部22c(盖22e)的前端部更靠后方。辅助板90的上端部配置成:比手柄22的上端部及左手柄接头21l的上端部更靠上方。辅助板90的下端部配置成:比手柄22的下端部更靠下方。
[0291]
图46是用于说明本实施方式的电动挖掘机1a的使用方法的侧视图。图47是用于说明本实施方式的电动挖掘机1a的使用方法的主视图。本实施方式中,电动挖掘机1a的挖掘对象为土墙。装配有附属装置102的电动挖掘机1a用于在土墙沿着横向形成出孔。在形成孔的情况下,以使得手柄22的前端部即连结棒部22c(盖22e)与地面接触的方式将电动挖掘机1a定位。
[0292]
作业者用左手握住前握把6,用右手握住手柄外壳3的握把部3b。另外,作业者使辅助板90与右腿接触。作业者以使得辅助板90与右腿的大腿部的内侧、膝盖的内侧及下腿部的内侧中的至少一部分接触,以蹲着的状态实施挖掘作业。
[0293]
作业者用握住握把部3b的右手的手指对触发器杆11a进行操作。通过对触发器杆11a进行操作,使得旋转输出部5以安装有钻头19的状态沿着图47的箭头所示的规定方向ra进行旋转。
[0294]
作业者将电动挖掘机1a向前方按,将旋转的钻头19按压于土墙。通过旋转的钻头19被按压于土墙,使得土墙被挖掘,在土墙形成出孔。
[0295]
在土墙挖掘中,有可能存在较大的反作用力gr趋向于与图47的箭头所示的规定方向ra相反方向,经由钻头19及旋转输出部5而作用于齿轮外壳4。
[0296]
另外,在土墙挖掘中,当钻头19碰到像岩石那样的较硬异物时,有可能存在过大的反作用力急剧地作用于齿轮外壳4。如果存在较大的反作用力作用于齿轮外壳4,则有可能电动挖掘机1a的姿态不稳定、或者把持电动挖掘机1a的作业者被摇晃。其结果,有可能很难在土墙形成出目标孔。
[0297]
本实施方式中,用于接受从旋转输出部5向齿轮外壳4传递的反作用力的辅助板90借助辅助手柄20而被装配于电动挖掘机1a。
[0298]
辅助板90由作业者的右腿压制,由此能够接受旋转输出部5的旋转方向上的反作用力gr。因此,即便有较大的反作用力gr作用于齿轮外壳4,电动挖掘机1a的姿态不稳定、或者保持电动挖掘机1a的作业者被摇晃的情形也会得以抑制。
[0299]
挖掘作业结束的情况下,作业者可以用手握住手柄22、握把部3b及前握把6中的至少一者,使电动挖掘机1a向跟前移动。通过电动挖掘机1a移动到跟前,能够将钻头19从在土墙所形成的孔中拔出。
[0300]
如以上所说明,本实施方式中,附属装置102具备辅助板90,该辅助板90配置于齿轮外壳4的左侧,接受从旋转输出部5向齿轮外壳4传递的反作用力。
[0301]
上述构成中,辅助板90能够辅助挖掘作业以在作为挖掘对象的土墙形成目标孔。作业者能够借助辅助板90而接受从旋转输出部5向齿轮外壳4传递的反作用力gr。据此,电动挖掘机1a的姿态不稳定、或者保持电动挖掘机1a的作业者被摇晃的情形得以抑制。因此,在土墙形成出目标孔。
[0302]
本实施方式中,辅助板90的前端部90a配置成:比齿轮外壳4的前端部更靠前方。
[0303]
上述构成中,由于辅助板90的外形大于齿轮外壳4的外形,所以,作业者能够借助辅助板90而接受从旋转输出部5向齿轮外壳4传递的反作用力gr。
[0304]
本实施方式中,附属装置102具备辅助手柄20,该辅助手柄20相对于齿轮外壳4而进行拆装。辅助板90固定于辅助手柄20的至少一部分。辅助手柄20具有:包括固定于齿轮外壳4的左部的左手柄接头21l及固定于齿轮外壳4的右部的右手柄接头21r在内的手柄接头21、以及固定于手柄接头21的手柄。辅助板90固定于左手柄接头21l。
[0305]
上述构成中,辅助手柄20由作业者的手把握,由此能够顺利地实施挖掘作业。辅助手柄20能够辅助挖掘作业,以便在土墙形成出目标孔。辅助板90固定于左手柄接头21l,因此,作业者能够借助辅助手柄20及辅助板90而接受从旋转输出部5向齿轮外壳4传递的反作用力gr。
[0306]
另外,本实施方式中,辅助板90可以固定于右手柄接头21r,也可以同时固定于左手柄接头21l及右手柄接头21r。
[0307]
另外,本实施方式中,可以将在马达外壳2的左手侧(前侧)所配置的手柄22视为由作业者的左手握住的第一握把部,将在马达外壳2的右手侧(后侧)所配置的握把部3b视为第二握把部。
[0308]
另外,本实施方式中,辅助板90借助辅助手柄20而被安装于齿轮外壳4。辅助板90可以安装于马达外壳2,也可以安装于手柄外壳3。通过辅助板90安装于电动挖掘机1a的适当部位,使得作业者能够借助辅助板90而接受反作用力。
[0309]
[第四实施方式]
[0310]
对第四实施方式进行说明。在以下说明中,对与上述实施方式相同或等同的构成要素标记相同的符号,并将该构成要素的说明简化或省略。
[0311]
图48是表示从前方观察本实施方式的电动挖掘机1b的立体图。电动挖掘机1b具备:马达外壳202、第一握把部203l、第二握把部203r、触发开关211、齿轮外壳204、旋转输出部205、以及辅助杆240。
[0312]
马达外壳202对马达进行收纳。另外,马达外壳202对蓄电池217进行收纳。
[0313]
第一握把部203l配置于马达外壳202的左侧。第二握把部203r配置于马达外壳202的右侧。触发开关211被操作,以便启动马达。触发开关211配置于第二握把部203r。
[0314]
齿轮外壳204与马达外壳202的下部连接。齿轮外壳204对齿轮进行收纳。
[0315]
旋转输出部205自齿轮外壳204向下方突出。在旋转输出部205安装有钻头219。
[0316]
辅助杆240在与钻头219相邻的位置沿着上下方向配置。辅助杆240发挥与上述的第一实施方式及第二实施方式中说明的辅助杆40同等的功能。辅助杆240配置于旋转输出部205的左侧或右侧,能够在上下方向上移动,且在上下方向上的规定位置被固定。辅助杆
240安装于马达外壳202及齿轮外壳204中的至少一者。另外,辅助杆240可以保持于:在马达外壳202及齿轮外壳204中的至少一者所安装的保持部件。
[0317]
[第五实施方式]
[0318]
对第五实施方式进行说明。在以下说明中,对与上述实施方式相同或等同的构成要素标记相同的符号,并将该构成要素的说明简化或省略。
[0319]
图49是表示从前方观察本实施方式的电动挖掘机1b的立体图。与上述的第四实施方式同样地,电动挖掘机1b具备:马达外壳202、第一握把部203l、第二握把部203r、触发开关211、齿轮外壳204、以及旋转输出部205。
[0320]
本实施方式中,电动挖掘机1b具备辅助板290。辅助板290发挥与上述的第三实施方式中说明的辅助板90同等的功能。辅助板290安装于马达外壳202及齿轮外壳204中的至少一者。辅助板290以作业者的身体接受由旋转输出部205的旋转产生的反作用力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1