适用于市政排水管道的垃圾清理机器人及作业方法与流程
1.本发明属于市政排水技术领域,特别涉及适用于市政排水管道的垃圾清理机器人及作业方法。
背景技术:
2.排水管道的污水中会夹带淤泥、塑料、纸巾、树枝等各种垃圾,在排水过程中容易沉积在管道中,若不定期清理则容易造成排水过程中的管道淤堵,从而造成污水溢流并严重影响居民生活,因此市政排水管道垃圾清理也成了管网日常运维的重要工作内容。
3.目前,除了具有一定含水率的污泥可用价格昂贵的特种作业清淤车清理外,管道垃圾清捞大多采用人工清理的方式,费时费力成本高、作业危险且清理效果不好。
4.针对这一问题,已有发明人提出对应的解决方案,公开号为cn 112901894 a的中国专利,公开了一种可移动市政排水管道垃圾清理机器人,包括安装筒、行走机构、前端搅动机构、后端粉碎机构,通过转动作用对排水管道内堵塞的垃圾进行圆周粉碎清理,通过设置的转动凸轮的转动作用,为搅动刀头提供向前的冲击力,对堵塞的垃圾进一步进行清理。
5.该专利仅对管道内堵塞的垃圾进行切割粉碎,并不能一次性将管道内的垃圾移除,对管道内垃圾粉碎切割,使得垃圾与管壁脱离后,大量垃圾从管壁脱落,没有将脱落的垃圾移除,仍然会造成管道堵塞;另外,该专利结构复杂,采用大量齿轮结构,不可避免的管道内垃圾会对齿轮的工作产生较大影响,甚至出现卡死等现象,实际使用时故障率较高。
技术实现要素:
6.本发明的目的在于针对现有技术的不足,提出一种适用于市政排水管道的垃圾清理机器人,该清理机器人能够一次性将管道内的垃圾与管壁脱离开来,并且可将脱落的垃圾移除管道,彻底将管道内的垃圾完成清理。
7.本发明的技术目的是通过以下技术方案得以实现的:适用于市政排水管道的垃圾清理机器人,包括机器人本体,机器人本体上设置行走机构,所述机器人本体的一端连接自动清理装置,所述自动清理装置用于将管道内的垃圾铲松并自动收纳移除到管道外部。
8.优选的,所述自动清理装置包括连接在机器人本体一端的支撑座,所述支撑座通过支撑柱与设置在所述机器人本体内部的顶板固定连接,所述顶板与推力油缸连接,所述机器人本体内安装液压站,所述液压站与所述推力油缸连接;所述支撑座上安装第一伺服电机,所述第一伺服电机的转轴上连接转筒,所述转筒一端设置开口,所述转筒的端部固定连接两个电机座,所述电机座内均安装第二伺服电机,两个第二伺服电机的转轴上均连接一铲板;两个所述第二伺服电机转轴与第一伺服电机的转轴在空间上互相垂直,并使两个铲板随第二伺服电机转动后打开或者关闭所述转筒。
9.优选的,所述转筒上开设延伸到所述转筒内的通孔。
10.优选的,所述转筒为圆柱状,两个所述铲板均成半圆形,两个所述铲板随所述第二伺服电机转动后,将管道内的垃圾铲入所述转筒后将所述转筒的开口封闭。
11.优选的,所述行走机构包括转动安装在所述机器人本体底部的行走轮,所述机器人本体内安装动力系统,所述动力系统与所述行走轮连接。
12.优选的,机器人本体上还设置防滑机构。
13.优选的,所述防滑机构包括连接在所述机器人本体两侧和顶部的三个液压伸缩撑杆,三个所述液压伸缩撑杆的端部均铰接一撑板;所述液压伸缩撑杆与所述液压站连接。
14.优选的,所述撑板构造成与管道内壁相适配的弧形结构。
15.优选的,所述机器人本体内安装有控制主板,所述控制主板上连接无线传输模块,所述动力系统与所述控制主板电连接;所述机器人本体顶部在两端还安装前摄像头和后摄像头,所述前摄像头和后摄像头与所述无线传输模块电连接,所述第一伺服电机和第二伺服电机均与所述控制主板电连接。
16.本发明还提供了适用于市政排水管道的垃圾清理机器人的作业方法,包括以下步骤:s1初始状态时,转筒静止,且铲板在转筒上处于打开状态;s2机器人进入管道后,当转筒和铲板遇到垃圾时,控制第一伺服电机旋转转筒,转筒上的铲板处于打开状态,铲板跟随转筒旋转,机器人在行走的同时转筒和铲板配合对垃圾进行清理和收容;s3当遇到阻力太大,机器人出现打滑无法前进时,控制伸长液压伸缩撑杆,使三个液压伸缩撑杆端部的撑板与管道内壁顶紧,推力油缸伸长推动支撑座位移,当推力油缸达到最大行程后,收缩推力油缸和液压伸缩撑杆;s4重复s2继续作业,若遇到阻力太大造成机器人无法前行打滑,则跳转到步骤s3继续作业;s5运行一段时间后停止前进,控制第二伺服电机转动闭合铲板,对清理的垃圾进行封装,第一伺服电机带动转筒旋转一定时长,对转筒内的垃圾进行脱水后离开管道;s6将机器人移动至指定垃圾堆放处,打开铲板门倒出垃圾后,恢复至初始状态。
17.相比于现有技术,本发明具有以下有益效果:1、本发明借助具有铲板的转筒,可通过旋切式更好的克服阻力进行垃圾清装;同时铲板可开合,装完垃圾后可轻松实现封装,避免垃圾掉落,提高垃圾清装效率,清理时可一次性完成清理和移除。
18.2、本发明借助可伸缩的撑顶杆和支撑座,可实现机器人站立手臂旋切式蠕动清装,进一步提高垃圾清装时可克服阻力值的上限,从而增大机器人的作业工况适用范围。
19.3、本发明的转筒的桶身开有通孔,在旋切作业以及封门甩干时,可实时对淤泥进行脱水,降低含水率,极大降低传统作业方式下高含水率淤泥清捞后的处理难度。
20.4、本发明的结构将动力系统安装在机器人本体内,机器人本体可进行封闭式组装,能够更好的适应管道垃圾清理使用场景,避免垃圾对机器人本身动力系统造成卡死等阻碍,极大的提高工作效率并减少操作人员的操作难度和强度。
21.5、本发明的机器人和方法,在出现垃圾无法清除造成前进受阻时,能够利用防滑机构对粘接牢固的垃圾进行清理,保证了机器人在管道中清理垃圾的顺畅性。
附图说明
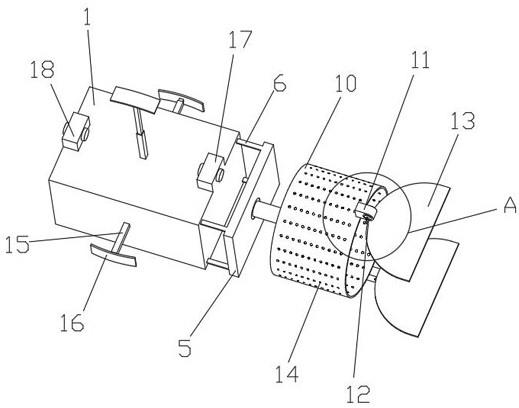
22.图1是本发明的结构示意图。
23.图2是本发明另一结构示意图。
24.图3是本发明铲板处于关闭状态的结构示意图。
25.图4是本发明中支撑座的连接关系结构示意图。
26.图5是图1中a部放大结构示意图。
27.图6是本发明的一种使用状态结构示意图。
28.上述附图中:1、机器人本体;2、行走机构;3、行走轮;4、自动清理装置;5、支撑座;6、支撑柱;7、顶板;8、推力油缸;9、第一伺服电机;10、转筒;11、电机座;12、第二伺服电机;13、铲板;14、通孔;15、液压伸缩撑杆;16、撑板;17、前摄像头;18、后摄像头;19、管道。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.实施例1参考图1-图6,作为本发明的一种优选实施例,本实施例提供一种适用于市政排水管道的垃圾清理机器人,包括机器人本体1,机器人本体1上设置行走机构2,所述行走机构2包括转动安装在所述机器人本1体底部的行走轮3,所述机器人本体1内安装动力系统,所述动力系统与所述行走轮3连接;所述机器人本体1的一端连接自动清理装置4,所述自动清理装置4用于将管道内的垃圾铲松并自动收纳移除到管道外部;自动清理装置4包括连接在机器人本体1一端的支撑座5,所述支撑座5通过支撑柱6与设置在所述机器人本体1内部的顶板7固定连接,所述顶板7与推力油缸8连接,所述机器人本体1内安装液压站,所述液压站与所述推力油缸8连接;所述支撑座5上安装第一伺服电机9,所述第一伺服电机9的转轴上连接转筒10,所述转筒10一端设置开口,所述转筒10的端部固定连接两个电机座11,所述电机座11内均安装第二伺服电机12,两个第二伺服电机12的转轴上均连接一铲板13;两个所述第二伺服电机12的转轴与第一伺服电机9的转轴在空间上互相垂直,并使两个铲板13随第二伺服电机12转动后打开或者关闭所述转筒10的开口。
31.在上述实施例的描述中,推动机器人本体1上的行走轮行走的动力系统,已是本领域的公知,例如采用电机作为源动设备,采用齿轮传动作为传动系统,能轻易实现机器人行走,该部分结构也并非本发明的核心改进点,本技术的描述中不作赘述,但本领域技术人员根据本发明的技术构思应当知晓,在不脱离本发明构思的基础上,实现机器人行走的动力系统均能够对本发明进行实施。
32.在一些优选实施例中,所述转筒10上开设延伸到所述转筒10内的通孔14。通孔14的作用包括在转筒10装有垃圾后通过旋转将垃圾中的液体甩出,降低垃圾含水率,提高垃圾移除效率。
33.在一些优选实施例中,所述转筒10为圆柱状,两个所述铲板13均成半圆形,两个所述铲板13随所述第二伺服电机12转动后,将管道内的垃圾铲入所述转筒10后将所述转筒10
的开口封闭。当转筒10采用本实施例中的结构形式时,转筒10与管道的结构形式对应,有利于机器人在管道中前进或者后退。
34.在一些优选实施例中,机器人本体1上还设置防滑机构。防滑机构的作用主要在于,当管道垃圾不能顺利清除,尤其是不能通过铲板使垃圾从管壁内上脱离时,就需要对机器人本身进行固定,利用强大的反力作用将顽固垃圾从管道内壁上割离。
35.在一些优选实施例中,所述防滑机构包括连接在所述机器人本体1两侧和顶部的三个液压伸缩撑杆15,三个所述液压伸缩撑杆15的端部均铰接一撑板16;所述液压伸缩撑杆15与所述液压站连接。本实施例中,通过三个方向的液压伸缩撑杆15,对机器人进行多个方向的固定,该情形下,利用推力油缸8将支撑座5向前推进,也即对转筒10进行推进,利用固定后的机器人作为反力点,将管道内壁粘接的顽固垃圾进行清除,这样对管道垃圾清除更加彻底,可避免遗漏和遗留,有效疏通管道。
36.在一些优选实施例中,所述撑板16构造成与管道内壁相适配的弧形结构。撑板16在该结构形式下,与管道19的内壁能够更好接触,具有较大接触面积,在固定机器人时,能够使机器人本体更加稳定,防止发生机器人侧翻等情形。
37.在另一些优选实施例中,所述机器人本体1内安装有控制主板,所述控制主板上连接无线传输模块,所述动力系统与所述控制主板电连接;所述机器人本体1顶部在两端还安装前摄像头17和后摄像头18,所述前摄像头17和后摄像头18与所述无线传输模块电连接,所述第一伺服电机9和第二伺服电机12均与所述控制主板电连接。本实施例中,能够对机器人实现远程控制,结合机器人本体上设置的两个摄像头,能够更加高效的清理管道垃圾,对没有垃圾的管段,可快速通过,对垃圾较多的管道通过上述的多种清理形式,快速完成清理,减少市政管道的停运时间。
38.实施例2本发明还提供了适用于市政排水管道的垃圾清理机器人的作业方法,包括以下步骤:s1初始状态时,转筒10静止,且铲板13在转筒10上处于打开状态;s2机器人进入管道19后,当转筒10和铲板13遇到垃圾时,控制第一伺服电机9旋转转筒10,转筒10上的铲板13处于打开状态,铲板跟随转筒10旋转,机器人在行走的同时转筒10和铲板13配合对垃圾进行清理和收容;s3参阅附图6,当遇到阻力太大,机器人出现打滑无法前进时,控制伸长液压伸缩撑杆15,使三个液压伸缩撑杆15端部的撑板16与管道19内壁顶紧,推力油缸8伸长推动支撑座5位移,当推力油缸8达到最大行程后,收缩推力油缸8和液压伸缩撑杆15;s4重复s2继续作业,若遇到阻力太大造成机器人无法前行打滑,则跳转到步骤s3继续作业;s5运行一段时间后停止前进,控制第二伺服电机12转动闭合铲板,对清理的垃圾进行封装,第一伺服电机9带动转筒10旋转一定时长,对转筒10内的垃圾进行脱水后离开管道;s6将机器人移动至指定垃圾堆放处,打开铲板门倒出垃圾后,恢复至初始状态。
39.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技
术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1