一种基于TOF相机的夯沉量测量方法
一种基于tof相机的夯沉量测量方法
技术领域
1.本发明属于计算机视觉、图像、视频处理技术领域,具体涉及一种基于tof相机的强夯机夯沉量测量方法。
背景技术:
2.强夯机(dynamic consolidation)通常是指处理地基时用起重设备反复将80-400kn的锤(最重的达2000kn)起吊到8-25m高处(最高的达40m)后使其自由下落的夯实器械,它通过在土中形成强大的冲击波和高应力,从而提高地基的强度、降低压缩性、改善抵抗振(震)动液化能力、消除湿陷性、提高土的均匀程度、减少差异沉降等。按照中华人民共和国国家标准gb50202-2018《建筑地基基础工程施工质量验收规范》强夯地基质量检验标准的主控项目为地基的强度、承载力和变形指标,一般项目为夯锤落距、夯锤质量、夯击遍数、夯击顺序、夯击击数、夯击位置、夯击范围、前后两遍间歇时间、最后两击的平均夯沉量、总夯沉量和场地平整度等。由于主控项目须在地基处理完成一段时间后通过静载、动探等才能得到检测,因此对一般项目进行过程控制对最终夯沉结果很有必要。
3.中国发明专利(申请号:201610050755.1)公开了一种强夯机激光自动测距记录系统,该方法采用激光测量方式测量夯沉量,由于现场工况恶劣,泥土飞溅,容易遮挡激光导致激光照射到夯坑底部出现误差,实际应用效果不佳。中国发明专利(申请号:201820291125.8),通过在卷扬机上设置磁电编码器以及驾驶室内plc控制器进行控制测量,需要传动轴等结构导致整体结构相对复杂且测量精度不高。中国发明专利(申请号:201921818680.2)通过设置卷扬机,由卷扬机布置铵磁铁给霍尔传感器,霍尔传感器再传输给驾驶室的编码器给驾驶人员提供夯锤实时高度信息,夯沉量精度不够高而且安装和使用复杂,不能够便捷地满足新的强夯夯沉质量规范数据要求。中国发明专利(申请号:201922027324.5)提出一种夯沉量辅助记录装置,利用防护板装置减少了提前夯击对塔尺的测量造成干扰,提升了部分作业效率但同时也增加了人工作业的使用,通过人工记录数据进行数据反馈效率并不理想。
技术实现要素:
4.要解决的技术问题
5.为了解决现有方法在强夯机作业时对夯沉量测量不准确,数据反馈不够及时的问题,本发明提供一种基于tof相机的夯沉量测量方法,涉及以下几个问题:
6.1、现有的强夯机测距解决方案需要人工参与或者增加很多联动机械装置,存在安全隐患比较多而且装配麻烦。
7.2、强夯机作业现场往往工况恶劣,泥土飞溅,机器振动,现有技术解决方案实际应用效果不佳。
8.3、现阶段提出的强夯机夯沉量测量解决方案反馈夯沉数据需要的时间比较长且准确率不够高,影响强夯机夯沉作业进程。
9.4、现阶段提出的强夯机测量方案对夯沉量、夯沉次数等无法自动量化、不能够便利满足工程监管和核查。
10.技术方案
11.一种基于tof相机的夯沉量测量方法,其特征在于步骤如下:
12.步骤1:夯坑三维立体信息获取
13.一次夯沉工作结束以后,夯锤升起,将tof相机旋转至夯坑正上方使用主动投射调制光进行夯坑三维信息拍摄,以相机中心为原点建立笛卡尔三维直角坐标系,使用表格文件存储夯坑内每一点相对于相机中心的点云位置信息;
14.步骤2:夯沉量计算、夯沉信息保存
15.对点云信息进行分析处理,对由于地质问题和振动问题造成的夯坑三维信息的飞点噪声、由于夯沉作业灰尘漫反射和夯坑周围断面的不规则漫反射问题导致的多径串扰干扰因素进行筛选排除,然后对剩下代表夯沉面的点云位置信息进行计算得出当前夯沉量并进行数据保存;
16.步骤3:夯沉数据分析
17.对保存的数据进行分析处理,比对最近两次夯沉作业结束后的夯沉总量数据变化,如果夯沉数据分析结果满足工程需求,那么此夯坑的作业结束,否则继续循环步骤1-3直至满足工程要求为止。
18.本发明进一步的技术方案:步骤2具体为:
19.步骤21:对原始数据信息进行去噪处理,所采用的去噪滤波模型为:
[0020][0021]
其中,d是场景对应的原始的含有噪声夯坑三维信息,d’为经过去噪处理后的夯坑三维信息,ω表示以像素(x,y,z)为中心的矩形邻域,w(i,j,k)为(x,y,z)点处的滤波器权值,w
p
则是进行了归一化的参数;
[0022]
步骤22:将被确定为干扰因素的数据删除掉,选出代表夯坑底部的点云数据进行质量评估,评估角度为点云数据密度、点云数据覆盖:所述的点云密度是指通过将整块数据对应区域化为若干个基元区域后,统计基元区域的数据点的个数,然后除以基元区域的面积后得到点云密度,进而统计点云密度值,然后构建统计分布图和直方图;所述的点云数据覆盖就是要检测漏洞的面积,在确定漏洞的比例指数后,统计漏洞的面积大小所占数据区域的比例,比较指标值来确定数据质量的好坏;计算得到点云密度的均值后,确定阈值,统计密度值,若小于该阈值则为漏洞,如此逐渐检测整个数据区域,后将得到的漏洞的面积之累加,计算所占的比例;
[0023]
步骤23:对步骤22中筛选后的数据按照编号进行随机抽取3组,每组数据使用步骤5中总数据量的1/10,首先将数据按照每10个为一组进行等量分组,对每个等量分组内10个数据采用简单随机抽样算法抽取该组数据x1、x2、x3,分别存放在三个抽样数组x1、x2、x3中,依次往下进行直至所有数据抽样完毕;抽样结束后对3组抽样数据分别计算得到抽样夯沉值x1、x2、x3,计算得到的夯沉量均值处理:hi=(x1+x2+x3)/3,计算完毕后将所有结果保存并显示在显示器端。
[0024]
本发明进一步的技术方案:步骤22中的阈值为均值-3倍的方差。
[0025]
本发明进一步的技术方案:计算结果hi与上一次行沉量h
i-1
、总需求夯沉量h进行比对,分析最后两次夯沉量变化以及最终夯沉数据是否满足夯沉需求,如果满足,则此夯坑夯沉作业执行完毕,否则继续执行直至满足工程质量要求。
[0026]
有益效果
[0027]
本发明提供的一种基于tof相机的夯沉量测量方法,能够使用比较简易的装置减轻夯沉测量负担,在夯沉作业泥土飞溅、浮尘、强风等工况恶劣的环境下将测量误差控制在cm级别,同时在1s内给出夯沉量测量结果并对质量规范一般项目进行数据分析,极大程度上增加夯沉工作效率,有效保障强夯作业质量。具有以下有益效果:
[0028]
1、夯沉测量设备、过程简约。本发明是基于tof相机的夯沉量测量方法,通过tof相机获取夯坑的三维信息。相对于通过卷扬机以及电编码器计数获取绳长或者人工进行数据记录进而计算夯沉量的方法而言,本发明仅仅需要一个活动杆承载tof设备去获取夯坑信息,然后进行分析运算就可以获得更加准确的夯沉量信息。
[0029]
2、本发明应对恶劣的工地环境表现良好。在工地泥土飞溅,机器振动,或者有不好的天气情况时,现有的激光测距解决方案会因为容易获得不准确的信息而导致误较大,而本发明对整个夯坑的三维信息进行抓取,筛选干扰信息以后对夯坑整个面进行数据分析会更加准确。
[0030]
3、本发明反应速度更快。现有的使用卷尺、人工测量或者水平仪的方案不仅获取数据需要的时间比较长,而且后续进行数据的反馈与校正需要的时间或更久而耽误夯沉作业进程,本发明使用仅需将活动杆旋转到夯坑上方,然后获取夯坑信息和数据分析与记录的工作可以在秒级反应时间完成,极大提升工作效率。
[0031]
4、对夯沉作业进行量化和自动分析。现有卷扬机的解决方法没有提出数据记录的功能,本发明设计信息存储与分析模块,将夯沉作业获得的点云相关参数,夯沉量等信息建立表格文本,对每日的工作记录建立文件夹生成作业报表,便于夯沉作业的监管和核查。
附图说明
[0032]
附图仅用于示出具体实施例的目的,而并不认为是对本发明的限制,在整个附图中,相同的参考符号表示相同的部件。
[0033]
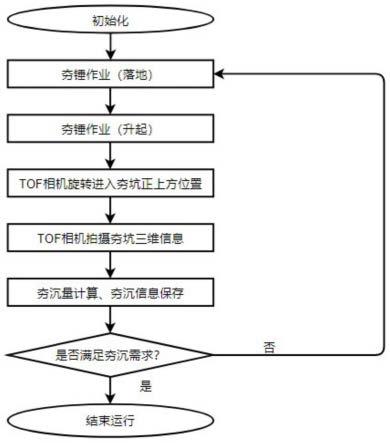
图1是本发明的流程图。
[0034]
图2本发明专门设计进行夯沉量测量与数据分析,用于对干扰信息进行筛除以保证反馈数据的准确性、对强夯机工作信息保存以便于夯沉作业监管核查。
[0035]
图3是夯沉量测量示意图。
[0036]
1-tof相机、2-活动杆、3-集成运算和显示设备(微型电脑)、4-夯锤。
具体实施方式
[0037]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。此外,下面描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
[0038]
如图3所述,为本发明夯沉量测量系统,包括tof相机1、活动杆2、集成运算和显示设备(微型电脑)3、夯锤4。tof相机1固定在活动杆2上,tof相机1与微型电脑3连接进行数据传输。
[0039]
参照图1、图2,本发明提供一种基于tof相机地夯沉量测量方法,在强夯机进行夯沉作业时,对强夯地基质量验收规范的夯沉量、夯沉次数等进行测量和数据分析,从而判断夯沉作业是否满足工程质量要求。包括以下3个部分:
[0040]
1)夯坑三维立体信息获取
[0041]
一次夯沉工作结束以后,夯锤升起,将tof相机旋转至夯坑正上方使用主动投射调制光进行夯坑三维信息拍摄,以相机中心为原点建立笛卡尔三维直角坐标系,使用表格文件存储夯坑内每一点相对于相机中心的点云位置信息;
[0042]
2)夯沉量计算、夯沉信息保存
[0043]
对第1步测得的点云信息进行分析处理,对由于地质问题和振动问题造成的夯坑三维信息的飞点噪声(flying pixels)、由于夯沉作业灰尘漫反射和夯坑周围断面的不规则漫反射问题导致的多径串扰(multipath interference)干扰因素进行筛选排除,然后对剩下代表夯沉面的点云位置信息进行计算得出当前夯沉量并进行数据保存;
[0044]
3)夯沉数据分析
[0045]
对第2步保存的数据进行分析处理,比对最近两次夯沉作业结束后的夯沉总量数据变化,如果夯沉数据分析结果满足工程需求,那么此夯坑的作业结束,否则继续循环1-3过程直至满足工程要求为止。
[0046]
本发明的具体实现步骤如下:
[0047]
步骤1,初始测量,将tof相机旋转至夯点处,测量tof相机与被夯地面的初始距离,保存初始夯点信息,然后将tof相机旋转至夯坑外,钢索松开夯锤,夯锤从空中预定高度自由下落进行第一次打夯作业,完成打夯动作以后系统控制钢索将夯锤升起。
[0048]
步骤2,夯锤升起,在夯锤高度高于tof相机时将tof相机旋转至夯坑正上方对夯坑三维信息进行获取,此时强夯机继续执行夯锤升起动作直至夯锤到达预定高度。
[0049]
步骤3,tof相机模块离开夯坑,集成处理和显示模块对步骤2中tof相机的三维信息进行读取,保存本次夯沉的原始数据、工作时间相关信息。
[0050]
步骤4,去噪滤波器对原始数据信息进行处理,其目的是尽可能保存真实可靠的深度像素值,并对那些因为夯坑内飞溅的泥沙、空气中浮尘这种具有偏差的深度像素进行纠错处理,本发明去噪滤波模块注意保留夯坑场景中前后景的边缘信息,去噪滤波模型为:
[0051]
其中,d是场景对应的原始的含有噪声夯坑三维信息,d’为经过去噪处理后的夯坑三维信息,ω表示以像素(x,y,z)为中心的矩形邻域,w(i,j,k)为(x,y,z)点处的滤波器权值,w
p
则是进行了归一化的参数。
[0052]
步骤5,将步骤4中被确定为干扰因素的数据删除掉,选出代表夯坑底部的点云数据进行质量评估,评估角度为点云数据密度、点云数据覆盖:点云密度是指通过将整块数据对应区域化为若干个基元区域后,统计基元区域的数据点的个数,然后除以基元区域的面
积后得到点云密度,进而统计点云密度值,然后构建统计分布图和直方图。点云数据覆盖就是要检测漏洞的面积,在确定漏洞的比例指数后,统计漏洞的面积大小所占数据区域的比例,比较指标值来确定数据质量的好坏。具体的算法要依据之前统计的点云密度统计。计算得到点云密度的均值后,确定阈值(一般为均值-3倍的方差),统计密度值,若小于该阈值则为漏洞,如此逐渐检测整个数据区域,后将得到的漏洞的面积之累加,计算所占的比例。经过质量评估后合格的数据会进入步骤6,否则重重复执行步骤2-5。
[0053]
步骤6,对步骤5中筛选后的数据按照编号进行随机抽取3组,每组数据使用步骤5中总数据量的1/10,首先将步骤5中数据按照每10个为一组进行等量分组,对每个等量分组内10个数据采用简单随机抽样算法抽取该组数据x1、x2、x3,分别存放在三个抽样数组x1、x2、x3中,依次往下进行直至所有数据抽样完毕。抽样结束后对3组抽样数据分别计算得到抽样夯沉值x1、x2、x3,计算得到的夯沉量均值处理:hi=(x1+x2+x3)/3,计算完毕后将所有结果保存并显示在显示器端。
[0054]
步骤7,对步骤6中计算结果hi与上一次行沉量h
i-1
、总需求夯沉量h进行比对,分析最后两次夯沉量变化以及最终夯沉数据是否满足夯沉需求,如果满足,则此夯坑夯沉作业执行完毕,否则继续执行步骤1-6直至满足工程质量要求。
[0055]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明公开的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1