连续墙成槽机及其成槽施工自动控制方法、系统与流程
1.本发明涉及一种连续墙成槽机,更具体地说,涉及一种连续墙成槽机及其成槽施工自动控制方法、系统。
背景技术:
2.地下连续墙是基础工程在地面上采用一种挖槽机械,沿着深开挖工程的周边轴线,在泥浆护壁条件下,开挖出一条狭长的深槽,清槽后,在槽内吊放钢筋笼,然后用导管法灌筑水下混凝土筑成一个单元槽段,如此逐段进行,在地下筑成一道连续的钢筋混凝土墙壁,作为截水、防渗、承重、挡水结构。
3.现有连续墙的槽体的形成有操作人员操控连续墙成槽机完成,即操作人员操控连续墙成槽机回转,使液压抓斗移动至槽体上方,下放液压抓斗至槽体内进行抓取动作后再提升液压抓斗,待液压抓斗离开槽体后一定高度后再回转至卸土位置进行卸土,如此往复。现有的成槽施工过程依靠驾驶员目视及监控仪表参数,手动操作各动作完成。手动控制需要驾驶员长期处于注意力集中的状态,频繁性重复操作会增加疲劳感,易出现施工问题。
技术实现要素:
4.本发明要解决的技术问题是现有连续墙成槽机由手动操作成槽的劳动强度大的问题,而提供一种连续墙成槽机及其成槽施工自动控制方法、系统,以期降低劳动强度,提高工作效率。
5.本发明为实现其目的的技术方案是这样的:提供一种连续墙成槽机成槽施工自动控制方法;
6.其特征在于步骤包括参数设定步骤和成槽施工步骤:
7.所述参数设定步骤为设定包含槽体位置角度、卸土位置角度内的工作参数;
8.所述成槽施工步骤包括控制器在接收到自动成槽施工启动指令后依次进行如下步骤完成一次作业循环:
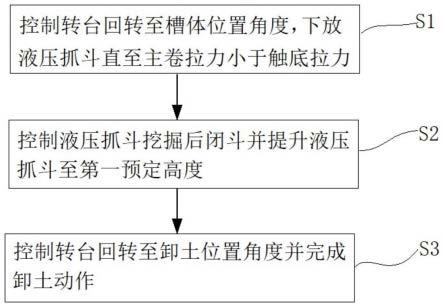
9.s1:控制器控制连续墙成槽机的转台回转至槽体位置角度使连续墙成槽机的液压抓斗位于槽体上方,控制连续墙成槽机的卷扬机构下放液压抓斗直至实时检测到的主卷拉力小于设定的触底拉力;
10.s2:控制器控制液压抓斗进行挖掘动作后闭斗并控制卷扬机构提升液压抓斗至第一预定高度;
11.s3:控制器控制转台回转至卸土位置角度,在卸土位置控制液压抓斗完成由预定数次开闭斗动作组成的卸土动作。
12.在本发明中,在设定好作业参数后并接收到自动成槽施工启动指令后,连续墙成槽机自动完成转台回转、液压抓斗下放入槽、液压抓斗挖掘、液压抓斗提升、转台回转与液压抓斗卸土的操作作业循环,降低操作者的劳动强度。
13.本发明连续墙成槽机成槽施工自动控制方法中,在步骤s3中,在完成卸土动作后
检测主卷拉力,如果当前主卷拉力大于设定的卸土后主卷拉力时控制器控制液压抓斗重复进行卸土动作直至检测到的主卷拉力小于设定的卸土后主卷拉力或在重复进行的卸土动作次数超过预定次数时停止成槽施工步骤。对于一些粘性土,或者卡在液压抓斗中的岩石,常规的开闭斗次数不能将液压抓斗中的土料卸净,通过检测卸土动作后的主卷拉力判断是否液压抓斗内土料是否卸净,若未卸净则进行多次卸土动作以便达到将斗内土料卸净的目的。若经过多次卸土动作还未卸净土料时,则需要停止施工进行检测或人工手动辅助卸土操作。
14.本发明连续墙成槽机成槽施工自动控制方法中,步骤s2包括以下步骤:
15.s20:控制液压抓斗完成挖掘动作后闭斗并执行步骤s21;
16.s21:在液压抓斗提升第二预定高度时检测主卷拉力并执行步骤s22;
17.s22:如果当前主卷拉力小于预设的满斗抓取拉力时执行步骤s23;如果当前主卷拉力大于等于预设的满斗抓取拉力或者单次作业循环执行步骤s20的次数超过预定挖掘次数时执行步骤s24;
18.s23:控制器控制卷扬机构下放液压抓斗直至实时检测到的主卷拉力小于触底拉力后执行步骤s20;
19.s24:控制卷扬机构提升液压抓斗至第一预定高度。
20.通过检测主卷拉力判断液压抓斗在挖掘抓取步骤中抓取的土料量是否达到预定量,若未达到,则重复抓取挖掘动作,以便实现满斗作业。
21.本发明连续墙成槽机成槽施工自动控制方法中,在每一次的作业循环步骤s1中均检测液压抓斗的触底深度,所述触底深度是主卷拉力小于设定的触底拉力时液压抓斗的下放深度;
22.在首次作业循环之后的每次作业循环的步骤s1中,如果当前触底深度与前次作业循环的触底深度的差值大于对应预设值时执行步骤s2;如果当前触底深度与前次作业循环的触底深度的差值小于对应预设值时停止成槽施工步骤。通过实时检测主卷拉力和液压抓斗下放深度,判断液压抓斗正常触底还是被槽体的壁面卡住或其他情况导致液压抓斗未抵达之前的挖掘深度,若液压抓斗被卡住不能顺利下放触底,则停止成槽施工步骤。
23.本发明连续墙成槽机成槽施工自动控制方法中,参数设定步骤还包括设定槽体设计深度;
24.在步骤s3中,完成卸土动作后比对本次作业循环中液压抓斗的触底深度与槽体设计深度,当本次作业循环中液压抓斗的触底深度与槽体设计深度的差值大于对应预设值时执行步骤s1,否则停止成槽施工步骤。在本发明中,通过比对触底深度与槽体设计深度,判断槽体挖掘深度是否达到设计要求,若未达到要求可进行多个作业循环连续自动作业,在槽体挖掘至设定深度后可自动停止。
25.本发明连续墙成槽机成槽施工自动控制方法中,在步骤s2中,单次作业循环执行步骤s20的次数超过预定挖掘次数时在完成步骤s24或者在完成步骤s3中的卸土动作后停止成槽施工步骤。单次作业循环执行步骤s20的次数超过预定挖掘次数时说明液压抓斗在挖掘抓取土料时出现异常,例如槽体底部出现液压抓斗不能抓取的岩石,或者液压抓斗出现机械故障不能进行抓取作业。在出现这种异常情况是,则需要在液压抓斗被提升出槽体后或者在卸料后停止成槽施工步骤,以便检查。
26.本发明为实现其目的的技术方案是这样的:构造一种续墙成槽机成槽施工自动控制系统,包括转台回转系统、卷扬系统、液压抓斗液压系统,其特征在于包括用于控制转台回转系统、卷扬系统、液压抓斗液压系统工作的控制器,所述控制器用于执行前述的连续墙成槽机成槽施工自动控制方法。
27.本发明连续墙成槽机成槽施工自动控制系统中,连续墙成槽机成槽施工自动控制系统还包括与所述控制器连接的输入设备和检测装置,所述输入设备用于输入设定工作参数和用于输入启动执行所述成槽施工步骤的控制指令;所述检测装置包括用于检测主卷拉力的力传感器、用于检测液压抓斗高度的卷扬测深编码器、用于检测转台相对底盘回转角度的回转角度编码器。
28.本发明连续墙成槽机成槽施工自动控制系统中,连续墙成槽机成槽施工自动控制系统还包括警报提示装置,所述警报提示装置用于在停止成槽施工步骤时显现控制器发送相应警报提示信息。在停止成槽施工步骤时发送相应的报警信息,使操作者知悉停止施工步骤的原因,以便采取相应的应对措施。
29.本发明为实现其目的的技术方案是这样的:构造一种续墙成槽机,其特征在于具有前述的连续墙成槽机成槽施工自动控制系统。
30.本发明与现有技术相比,在本发明中,在设定好作业参数并接收到自动成槽施工启动指令后,连续墙成槽机能自动完成液压抓斗的回转与入槽、挖掘、提升、回转与卸土的操作作业循环,降低操作者的劳动强度,提高作业效率。
附图说明
31.图1是本发明连续墙成槽机的结构示意图。
32.图2是本发明连续墙成槽机成槽作业时与槽体和卸土位置的位置关系示意图。
33.图3是本发明连续墙成槽机的液压抓斗在槽体中的位置关系示意图。
34.图4是本发明连续墙成槽机成槽施工自动控制方法的流程图。
35.图5是本发明连续墙成槽机成槽施工自动控制系统的结构框图。
36.图中零部件名称及序号:
37.连续墙成槽机10、液压抓斗11、底盘12、转台13、桅杆14、主卷扬15、钢丝绳16、槽体位置20、槽体位置角度21、卸土位置30、卸土位置角度31、控制器40、仪表41、卷扬测深编码器42、回转角度编码器43、力传感器44、回转电控阀45、卷扬电控阀46、抓斗电控阀47、警报提示装置48。
具体实施方式
38.下面结合附图说明具体实施方案。
39.如图1所示,本实施例中的连续墙成槽机包括桅杆14、液压抓斗11和转台13等,转台13回转安装在底盘12上,通过回转机构可驱动回转,桅杆14的下端铰接于转台13上,转台13上安装主卷扬15以及动力系统,液压抓斗11通过钢丝绳16绕桅杆14的顶部与主卷扬15连接,由主卷扬15收放钢丝绳16而提升或下放液压抓斗11,液压抓斗11通过液压管路与抓斗电控阀连接,通过控制抓斗电控阀可控制液压抓斗11进行开斗与闭斗等挖掘动作。
40.连续墙成槽机10进行成槽施工时,机器停放在槽体旁侧附近,连续墙成槽机的转
台回转动作,使得液压抓斗下放时能够下放至槽体中,从槽体中抓取土料后提升液压抓斗,再回转一定角度至卸土位置,从而完成一个工作循环。
41.本实施例中的连续墙成槽机成槽施工自动控制方法的步骤包括参数设定步骤和成槽施工步骤。
42.参数设定步骤包括设定槽体位置角度、卸土位置角度、卸土高度、槽体设计深度等工作参数。
43.如图2所示,操作员将连续墙成槽机10停放在连续墙的槽体旁侧的合理位置,使得连续墙成槽机10的液压抓斗11在一定位置高度且桅杆14处于合理倾斜角度时仅进行转台的回转操作就可以使液压抓斗11在槽体位置20的正上方和卸土位置30的正上方之间移动。操作员手动操控转台转动,并通过仪表41标定槽体位置20相对连续墙成槽机10的槽体位置角度21和卸土位置30相对连续墙成槽机10的卸土位置角度30,使得转台的回转角度转动至槽体位置角度21时液压抓斗11位于槽体位置20的正上方,转台的回转角度转动至卸土位置角度31时液压抓斗11位于卸土位置30的正上方。
44.操作员还通过仪表标定一些其他的工作参数,例如槽体的设计深度h1、液压抓斗的卸土高度。当液压抓斗挖掘的槽体深度达到槽体设计深度时,则停止该位置的成槽施工,待连续墙成槽机移动至下一施工位置进行成槽施工。液压抓斗从槽体内抓取土料时,在液压抓斗提升至卸土高度后再回转至卸土位置角度进行卸土。
45.成槽施工步骤即是控制器控制转台回转系统、卷扬系统、液压抓斗液压系统等完成转台返程回转、液压抓斗的下放、土料抓取、液压抓斗的提升、卸土回转、卸土动作等作业动作以完成一个作业循环。如图4所示,成槽施工步骤具体为控制器在接收到自动成槽施工启动指令后依次进行如下步骤:
46.s1:控制器控制连续墙成槽机的转台回转至槽体位置角度使连续墙成槽机的液压抓斗位于槽体上方,控制连续墙成槽机的卷扬机构下放液压抓斗直至实时检测到的主卷拉力小于设定的触底拉力;
47.s2:控制器控制液压抓斗进行挖掘动作后闭斗并控制卷扬机构提升液压抓斗至第一预定高度;
48.s3:控制器控制转台回转至卸土位置角度,在卸土位置控制液压抓斗完成由预定数次开闭斗动作组成的卸土动作。
49.在步骤s1中,控制器输出电信号给回转机构的电控阀控制回转机构工作,使转台向槽体位置角度方向转动,并根据获取的回转角度编码器数据,读取当前回转角度并与标定的槽体位置角度进行对比,若角度相等或大小差值小于阈值,则停止回转,否则执行回转动作。
50.在转台回转至槽体位置角度停止转动后,此时液压抓斗位于槽体的正上方,控制器控制卷扬机构释放钢丝绳,将液压抓斗下放至槽体内。在液压抓斗下放的过程中,实时检测主卷拉力,当主卷拉力小于设定的触底拉力时停止下放液压抓斗。
51.在液压抓斗触底之前,液压抓斗的重力作用于钢丝绳上,当液压抓斗触底以后,液压抓斗的重力作用于地面(支撑面)上,钢丝绳上的作用力相应地减小。因此可以根据连续墙成槽机的设计参数,选择设定一个相应大小的力作为触底拉力,用于判断液压抓斗是否触底。当液压抓斗处于悬空状态,由钢丝绳悬挂时,主卷拉力大于触底拉力;当液压抓斗触
底由地面支撑时,主卷拉力小于触底拉力。
52.主卷拉力是升降液压抓斗的卷扬机构的钢丝绳拉力,其可以通过传感器检测卷扬机构卷筒上的力矩或者桅杆上用于连接钢丝绳的定滑轮上所受的拉力进行相应地换算转化得到得到。
53.连续墙成槽机在每个施工点进行多次作业循环才能将槽体挖掘至设计深度。每个作业循环包括回转转台使液压抓斗移动至槽体上方、下放液压抓斗使液压抓斗触及槽体底部、液压抓斗挖掘土料并抓取后提升出槽体、回转转台使液压抓斗移动至卸土位置进行卸土等操作。
54.在每一次的作业循环中,在步骤s1中均检测液压抓斗的触底深度,触底深度是主卷拉力小于设定的触底拉力时液压抓斗的下方深度。
55.液压抓斗的下放深度可以通过安装在主卷扬的卷筒上的测深编码器进行检测。当检测到主卷拉力小于设定的触底拉力时检测到液压抓斗的下放深度作为本次作业循环中的触底深度。在正常作业的情况下,触底深度也即槽体的当前挖掘深度。
56.在首次作业循环之后的每次作业循环的步骤s1中,如果当前触底深度与前次作业循环的触底深度的差值大于对应预设值时则执行步骤s2;如果当前触底深度与前次作业循环的触底深度的差值小于对应预设值时停止成槽施工步骤。例如在正常作业情况下,液压抓斗的每次作业循环能够最大挖深槽体0.3米,可以将该预设值设定为0.1米,前一次作业循环的触底深度为3米,若当前的触底深度为3.2米,则当前触底深度与前次作业循环的触底深度的差值为0.2米,该差值大于相应的预设值,则推定为作业正常,执行步骤s2。如果当前的触底深度为2.8米,则当前触底深度与前次作业循环的触底深度的差值为-0.2米,该值小于相应的预设值,则推定为作业异常,出现这种情况有可能是槽体的槽壁发生坍塌使槽体的挖掘深度变浅,或者液压抓斗下放过程中被障碍物卡住使液压抓斗不能顺利下放至槽底,出现这些异常,需要退出成槽自动施工程序,以便施工人员查明情况后再进行施工,故如果当前触底深度与前次作业循环的触底深度的差值小于对应预设值时停止成槽施工步骤。
57.步骤s2包括以下步骤s20至步骤s24:
58.步骤s20:控制器控制液压抓斗在槽底完成挖掘动作后闭斗并执行步骤s21。液压抓斗触底以后,控制器向液压抓斗的控制阀发送控制信号,使液压抓斗进行预定设计的挖掘动作。挖掘动作可以依据液压抓斗的功能以及挖掘土料的属性事先设定,例如挖掘动作是可以由数次开闭斗动作构成。
59.步骤s21:在液压抓斗提升第二预定高度时检测主卷拉力,如果当前主卷拉力小于预设的满斗抓取拉力时执行步骤s22;如果当前主卷拉力大于等于预设的满斗抓取拉力或者单次作业循环执行步骤s20的次数超过预定挖掘次数时执行步骤s23。。按照正常的作业,完成挖掘动作并闭斗后,液压抓斗内应为满斗的土料(也即液压抓斗内的土料量达到预定值),但也有可能由于其他原因致使液压抓斗内的土料量未达到预定量。液压抓斗闭斗后位置提升第二预定高度,使液压抓斗脱离槽底的支撑。第二预定高度的具体值视工况决定,其条件是液压抓斗位置高度提升第二预定高度时液压抓斗脱离槽底的支撑。预设的满斗抓取拉力是液压抓斗抓取的土料量达到要求时的主卷拉力。液压抓斗位置高度提升第二预定高度后,通过检测主卷拉力的大小判断液压抓斗抓起的土料量是否达标。
60.步骤s22:控制器控制卷扬机构下放液压抓斗直至主卷拉力小于触底拉力后执行步骤s20。液压抓斗在闭斗后,其抓取的土料量未达到要求,则重新下放液压抓斗再次执行步骤s20进行土料的抓取,以便增加液压抓斗内的土料量。
61.步骤s23:控制卷扬机构提升液压抓斗至第一预定高度。液压抓斗被提升至第一预设高度后,液压抓斗处于槽体上方,其高度至少满足转台安全回转的要求。第一预设高度可以是液压抓斗的卸土高度,例如液压抓斗向运输土料的卡车车厢卸土的高度。第一预设高度也可以是低于卸土高度,在转台向卸土位置角度转动的过程中液压抓斗被提升至卸土高度。
62.在本实施例中,在步骤步骤s2,如果单次作业循环中执行步骤s20的次数超过预定挖掘次数时,则在执行完步骤s23或者在完成步骤s3中的卸土动作后停止成槽施工步骤。单次作业循环中执行步骤s20的次数超过预定挖掘次数时说明液压抓斗在挖掘抓取土料时出现异常,例如槽体底部出现液压抓斗不能抓取的岩石,或者液压抓斗出现机械故障不能进行抓取作业等。在出现这种异常情况时,则需要在液压抓斗被提升出槽体后或者在卸土后停止成槽施工步骤,以便检查。
63.步骤s3:控制器控制转台回转至卸土位置角度并在在卸土位置控制液压抓斗完成由数次开闭斗动作组成的卸土动作。
64.液压抓斗卸土完成后,其重量减小,主卷拉力相应地减小。在步骤s3中,在完成卸土动作后检测主卷拉力,如果当前主卷拉力大于设定的卸土后主卷拉力时说明液压抓斗卸土未净,此时控制器控制液压抓斗重复进行卸土动作直至检测到的主卷拉力小于设定的卸土后主卷拉力,如果在重复进行的卸土动作次数超过预定次数时,则表示出现异常,例如可能是岩石卡在液压抓斗中,或者由于土料的粘性太大,不能依靠自身重力从液压抓斗中脱离,此时需要停止成槽施工步骤,以便排除异常后重新启动成槽施工步骤或者继续执行成槽施工步骤。
65.在步骤s3中,完成卸土动作后比对本次作业循环中液压抓斗的触底深度与槽体设计深度,当本次作业循环中的触底深度与槽体设计深度的差值大于对应预设值时执行步骤s1,否则停止成槽施工步骤。例如槽体设计深度为5米,对应预设值为-0.2米,液压抓斗的每次作业循环能够最大挖深槽体0.3米,若本次作业循环中的触底深度为4.9米,则本次作业循环中的触底深度与槽体设计深度的差值为-0.1米,大于对应预设值-0.2米,则推定在本次作业循环后,槽体的深度达到设计要求,继而停止自动成槽施工,待确定下一成槽位置后再继续施工。
66.在上述实施例中,当控制器停止自动成槽施工步骤后,控制器依据停止自动成槽施工步骤的原因向括警报提示装置发送相应警报提示信息,以便操作人员依据停止施工的原因排除故障或进行后续操作。
67.本发明实施例还提供一种续墙成槽机成槽施工自动控制系统,该成槽施工自动控制系统包括转台回转系统、卷扬系统、液压抓斗液压系统,其特征在于包括用于控制转台回转系统、卷扬系统、液压抓斗液压系统工作的控制器,该控制器用于执行前述的连续墙成槽机成槽施工自动控制方法。
68.转台回转系统包括转台、驱动转台相对底盘转动的回转马达、将回转马达与液压泵连接并控制回转马达转动的回转电控阀45,回转电控阀与控制器连接并由其控制。
69.卷扬系统包括卷筒、驱动卷筒转动的卷扬马达、将卷扬马达与液压泵连接并控制卷扬马达转动的卷扬电控阀46,卷扬电控阀与控制器连接并由其控制。
70.液压抓斗液压系统包括液压抓斗、将液压抓斗中液压执行件(如油缸或马达)与液压泵连接并控制液压抓斗中液压执行件工作的抓斗电控阀47,抓斗电控阀与控制器连接并由其控制。
71.如图5所示,连续墙成槽机成槽施工自动控制系统还包括与控制器40连接的输入设备和检测装置,输入设备通常是与控制器连接的仪表41,比如触摸显示屏,其用于输入设定工作参数和用于输入启动执行止动成槽施工步骤的控制指令。检测装置包括用于检测主卷拉力的力传感器44、用于检测液压抓斗高度的卷扬测深编码器42、用于检测转台相对底盘回转角度的回转角度编码器43。力传感器44可以设置在桅杆上端用于连接钢丝绳的定滑轮的轮架上,检测定滑轮轮架上的受力,通过换算得出主卷拉力。
72.连续墙成槽机成槽施工自动控制系统还包括警报提示装置48,警报提示装置48可以是声光报警装置和显示装置,用于在停止成槽施工步骤时显现控制器发送相应警报提示信息。在停止成槽施工步骤时发送相应的报警信息,使操作者知悉停止施工步骤的原因,以便采取相应的应对措施。
73.本发明实施例还提供一种连续墙成槽机,该连续墙成槽机具有前述的连续墙成槽机成槽施工自动控制系统。在设定好作业参数并接收到自动成槽施工启动指令后,连续墙成槽机能自动完成液压抓斗的回转与入槽、挖掘、提升、回转与卸土的操作作业循环,降低操作者的劳动强度。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1