清淤设备的制作方法
1.本发明涉及清淤领域,具体而言,涉及一种清淤设备。
背景技术:
2.随着我国经济的快速发展,城市泵站、地下管网等排水系统所承受的压力越来越大,每逢雨季由于城市排水系统堵塞,造成城市内涝,使人民的生命和财产受到威胁。城市排水系统的重要性不言而喻,因此为了保证城市地下排水系统的正常运行,市政环卫部门投入了大量的人力、物力和财力,定期清理沉积堵塞的淤泥,以保障地下管网排水系统的安全可靠。
3.现有城市泵站清淤方法一般有两种:(1)先将泵站内水排干,再通过人工清理;(2)不排水的情况下使用水下清淤设备进行清理。此两种方法,第一种不但增加工人劳动强度,而且在狭小空间以及有毒有害场所内,容易对作业人员造成安全隐患。第二种现有水下清淤设备具有体积大、往返卸料时间长、工况适应性差、清淤效率低等缺点,往往不能满足当前的复杂作业趋势。
技术实现要素:
4.本发明旨在提供一种有利于在狭小空间内进行清淤作业的清淤设备。
5.根据本发明实施例的一个方面,本发明提供了一种清淤设备,清淤设备包括:
6.清淤装置,用于在清淤作业场地进行清淤作业;以及
7.控制装置,与清淤装置通过管线连接以在清淤作业场地外控制清淤装置工作,管线包括信号线缆和液压管路。
8.在一些实施例中,
9.清淤装置包括行走底盘和安装在行走底盘上并相对于行走底盘可俯仰摆动的工作臂,
10.工作臂包括工作臂本体和安装在工作臂本体上的用于抽吸淤泥的抽吸口部件,
11.行走底盘包括用于安装工作臂的工作臂安装座和驱动工作臂相对于行走底盘俯仰摆动的第一液压缸。
12.在一些实施例中,控制装置包括液压部,液压部包括液压阀组件,液压管路包括连接液压阀组件和第一液压缸的第一管路。
13.在一些实施例中,清淤装置还包括清淤机构,清淤机构包括安装在抽吸口部件的进口端的破松部和用于调整破松部的高度的第二液压缸,液压管路包括连接液压阀组件和第二液压缸的第二管路。
14.在一些实施例中,清淤机构还包括安装在破松部和抽吸口部件之间的铲斗。
15.在一些实施例中,破松部包括转轴和安装在转轴上的破松齿。
16.在一些实施例中,破松部还包括用于驱动转轴转动的第一液压马达,液压管路包括连接液压阀组件和第一液压马达的第三管路。
17.在一些实施例中,破松部包括用于驱动转轴转动的第一电机,管线包括与第一电机连接的第一动力电缆。
18.在一些实施例中,清淤机构还包括与工作臂本体连接的用于喷射高压水的喷嘴。
19.在一些实施例中,清淤装置还包括行走底盘和安装在行走底盘上的抽吸部,抽吸部包括抽吸泵和与抽吸泵的出口连接的排淤管路。
20.在一些实施例中,清淤装置还包括抽吸部,抽吸部包括与抽吸口部件连接的管路接头,管路接头用于通过抽吸管路与位于清淤作业场地外的抽吸泵连接。
21.在一些实施例中,
22.清淤装置包括行走底盘和用于驱动行走底盘行走的第二液压马达,控制装置包括液压部,液压部包括液压阀组件,液压管路包括连接液压阀组件和第二液马达的第四管路;或
23.清淤装置包括行走底盘和用于驱动行走底盘行走的第二电机,管线包括与第二电机连接的第二动力线缆。
24.在一些实施例中,
25.清淤装置还包括摄像头;
26.控制装置包括视频监控系统,视频监控系统包括显示器,管线包括连接摄像头和显示器的视频线缆。
27.在一些实施例中,
28.清淤装置还包括用于检测其姿态的姿态检测部件;
29.控制装置包括控制系统,控制系统包括控制器,管线包括连接姿态检测部件和控制器的信号线缆。
30.在一些实施例中,控制系统还包括报警器,控制器与报警器信号连接并被配置成在清淤装置的姿态异常时控制报警器发出报警信号。
31.在一些实施例中,控制装置还包括用于缠绕管线的卷盘。
32.应用本技术的技术方案,清淤装置和控制装置通过管线连接,管线包括信号线缆和液压管路,因此清淤装置不需配备液压泵和液压阀组,有利于实现清淤装置的小型化,清淤装置可进入狭小的清淤作业场地进行作业帮。
33.通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
附图说明
34.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
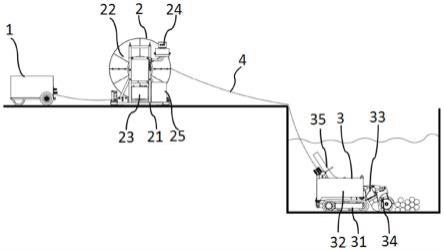
35.图1示出了本发明的实施例的清淤设备的结构示意图;
36.图2示出了本发明的实施例的清淤设备的清淤装置的结构示意图;
37.图3示出了本发明的实施例的清淤设备的清淤装置的行走底盘的结构示意图;
38.图4示出了本发明的实施例的清淤设备的清淤装置的工作状态示意图;
39.图5示出了本发明的实施例的清淤设备的控制装置的立体结构示意图;
40.图6示出了本发明的实施例的清淤设备的控制装置的结构示意图;
41.图7示出了本发明的另一些实施例的清淤设备的清淤装置的结构示意图;以及
42.图8示出了本发明的另一些实施例的清淤设备的清淤装置的工作状态示意图。
43.图中:
44.1、动力装置;
45.2、控制装置;21、支撑平台;22、卷盘;23、控制系统;231、控制箱;232、操作箱;233、无线遥控单元;234、电源接收模块;236、;24、视频监控系统;241、显示器;242、视频处理单元;25、;
46.3、清淤装置;31、行走底盘;311、第一液压缸;312、工作臂安装座;313、液压缸安装座;32、车架;321、支撑架;33、工作臂;331、抽吸口部件;3311、第一法兰板;3312、第二法兰板;3313、抽吸口部件铰接点;3314、耳板;3315、接头安装板;332、工作臂本体;34、清淤机构;341、第二液压缸;342、破松部;3421、第一破松部铰接点;3422、第二破松部铰接点;343、铲斗;344、喷嘴;35、抽吸部;351抽吸泵;352、排淤管路;353、管路接头;354、抱箍;36、;37、摄像头;38、姿态检测部件;4、管线。
具体实施方式
47.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
48.如图1所示,清淤设备包括动力装置1、控制装置2和清淤装置3。动力装置1为控制装置2和清淤装置3本身的控制系统以及液压元器件提供电源、适当压力和流量的液压油。动力装置1是履带式水下清淤设备的主要动力源泉。动力装置1包括液压动力站(汽油版)。
49.所述清淤装置3包括:行走底盘31、车架32、工作臂33、清淤机构34和抽吸部35。
50.行走底盘包括:第一液压缸311、工作臂安装座312、液压缸安装座313。
51.所述车架32包括:排淤管路支撑架321。
52.所述工作臂包括:抽吸口部件331、支撑纵梁332。
53.所述清淤机构34包括:第二液压缸341、破松部342、铲斗343、喷嘴344。
54.所述抽吸部35包括:抽吸泵351、排淤管路352、管路接头353、抱箍354。
55.所述控制装置2包括:支撑平台21、卷盘22、控制系统23、视频监控系统24、液压系统25。
56.所述控制系统23包括:控制箱231、操作箱232、无线遥控单元233、电源接收模块234、报警器236。
57.所述视频监控系统24包括显示器241、视频处理单元242和摄像头37。优选地,摄像头37为防水摄像头。
58.下面通过附图与具体实施方式对本发明做进一步说明:
59.如图2所示,为本发明所提出的一种履带式水下清淤设备清淤装置结构示意图,主
要通过履带底盘行走、工作臂变幅、清淤机构和抽吸部实现物料的清理作业,再通过排淤管路将物料排出至地面。本发明将液压阀组、电气控制等模块安装在操作装置上,致使清淤装置拥有更小的体积,从而适应狭小的作业空间,工作臂33和破松部342可进行变幅、旋转操作,大大提高了作业范围,前端清淤机构可根据不同工况进行绞龙、滚刷、破碎齿等机具的更换,可匹配高压水射流装置,进行板结物料辅助破松抽吸。
60.清淤装置前后端各装有防水的摄像头37,可视化观察水下清淤状态。姿态检测部件38能够监测清淤装置整机姿态,超过限定值会发出警报,防止造成倾翻危险。抽吸部可进行快速切换,实现对干物料、含水量少的物料以及水下淤泥抽吸作业,无需往返卸料,可连续性作业。
61.在具体实施例1中,如图2-3所示,工作臂33通过销轴固定连接在行走底盘31上,车架32通过螺栓固定在工作臂33上;液压缸安装座313焊接在行走底盘31后横梁上,第一液压缸311一端通过销轴固定连接在液压缸安装座313上,另一端通过销轴固定连接在支撑纵梁332上,工作臂安装座312一端通过螺栓固定在行走底盘31后横梁上,另一端通过销轴固定连接在耳板3314上,用于实现工作臂33变幅。
62.姿态检测部件38通过螺栓固定在行走底盘31上,用于检测清淤装置3整机姿态,当左右倾角值大于r1或前后倾角值大于r2时,控制单元接收到姿态检测部件38信号并处理发送至报警器236,报警器236接收到信号开始蜂鸣,提醒操作人员清淤装置3可能出现倾翻危险,需要进行整机姿态调整。
63.前后两路摄像头37通过螺栓固定在车架32上,通过摄像头37视频信号通信于视频处理单元242并处理解码发送至显示器241,用于操作人员可视化监控清淤装置3作业情况和作业环境。
64.排淤管路支撑架321通过螺栓固定在车架32上,用于固定液压快插接头36以及排淤管路352;抽吸口部件331两端分别焊接第一法兰板3311和第二法兰板3312,并将抽吸口部件331焊接在支撑纵梁332上,用于切换抽吸泵351和铲斗343机具。
65.铲斗343通过螺栓固定在第二法兰板3312上,第二液压缸341一端通过销轴固定连接在抽吸口部件铰接点3313上,另一端通过销轴固定连接在破松部342的第一破松部铰接点3421上。破松部342上的第二破松部铰接点3422通过销轴固定连接在抽吸口部件331上,用于实现破松部342变幅,增大作业面积以及破松板结物料。
66.喷嘴344通过螺栓固定在破松部342上,用于在抽吸口部件331抽吸板结物料时将板结物料击碎实现辅助破松抽吸,提高抽吸效率;清淤机构34可更换铲斗、破松部件、滚刷、破碎齿等不同机具,适应多种不同工况;抽吸泵351通过螺栓固定在第一法兰板3312上,排淤管路352一端通过管路接头353固定连接在抽吸泵351上,另一端穿过排淤管路支撑架321延伸到排污池或污泥干化车等其他辅助设备内。
67.如图7和8所示,在进行干物料或含水量少的物料抽吸时,去掉抽吸泵351并液压快插接头36固定在接头安装板3315上;将排淤管路352一端通过螺栓固定连接在第一法兰板3312上,另一端通过抱箍354固定在管路接头353上,通过管路接头353连接延长软管延伸到位于清淤作业场地外的吸污车等辅助设备(例如抽吸泵)内。
68.如图5-6示出了操作装置2的整体结构示意图,主要是通过卷盘上的液压软管和线缆向清淤装置远距离输送适当压力和流量的液压油以及电源信号,用于控制清淤装置履带
底盘行走和速度调节、清淤装置前端破松部件变幅、旋转和速度调节、臂架变幅等动作的执行以及视频信号传输等,操作人员可根据可视化界面进行物料清理作业。
69.在具体实施例2中,卷盘22固定在支撑平台21上,快插安装座211通过螺栓固定在支撑平台21上,液压快插接头251和电源接收模块234固定在快插安装座211上,用于接收动力装置1并连接于液压系统25、控制系统23和视频监控系统24为其提供适当流量的液压油和电源信号。
70.控制箱231通过螺栓固定在支撑平台21上。操作箱232通过螺栓固定在支撑平台21上,用于本地操控卷盘22和清淤装置3各个动作,将操作信号通信于控制箱231内的控制单元,控制单元处理并发送信号至液压系统25,实现各动作的执行。
71.无线遥控单元233通过螺栓固定在支撑平台21上,通过can总线通信于控制箱231内的控制单元,实现远距离无线遥控卷盘22和清淤装置3动作的执行。
72.报警器236通过螺栓固定在支撑平台21上,视频处理单元242通过螺栓固定在支撑平台21上,显示器241通过螺栓固定在操控箱232上,用于处理和显示摄像头37传输的视频信号;线缆和液压软管221缠绕在卷盘22上,用于长距离输送电源信号和液压油。
73.如图4所示,在进行城乡泵站、地下管网、狭小空间等场所作业时,针对不同的工况和抽吸介质可更换抽吸状态以及抽吸部。
74.工况1:城乡泵站、沟渠等水下作业空间,抽吸介质为淤泥等含水量大的物料,工作场景适合垂直抽吸时,切换为状态1,具体实施方法如下:通过控制装置2释放线缆和液压软管221与清淤装置2的液压快插接头36以及摄像头37对插,排淤管路352一端连接抽吸泵351,另一端延长并放入排污池或污泥干化车等其他辅助设备内,将动力装置1与控制装置2液压快插接头251以及电源接收模块234对插,并开启动力装置1,利用吊装设备将清淤装置3放入水下作业空间或操控清淤装置3自己行驶到水下作业空间,通过操控箱232控制卷盘22和清淤装置3各个动作,结合视频监控系统24和姿态检测部件38,显示器241可视化观察水下作业状态与清淤装置3姿态变化,在操作空间容易发生危险时,可切换为无线遥控,远距离操控设备,以保证人身安全。
75.如图8所示,工况2:地下管道等狭小空间内,环境中含有毒有害气体,抽吸介质为干物料或含水量少的物料,工作场景适合水平抽吸时,切换为状态2,具体实施方法与工况1方法相同。
76.以上所述仅为本发明的示例性实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1