大型桥梁深水预制基础定位沉放智能控制方法与流程
本发明涉及桥梁工程,尤其是一种大型桥梁深水预制基础定位沉放智能控制方法。
背景技术:
1、随着桥梁建设从内陆向外海发展,桥梁建设条件越来越复杂。如日本的明石海峡大桥通航净空1500m×65m,海峡中央最大水深110m,主塔处水深达45m,海域最大海流流速达到4.5m/s,索塔基础采用直径80m、高70m的圆形设置双壁钢沉箱基础,总重量达到19000吨。希腊的里翁-安蒂里翁大桥通航净空300m×65m,科林斯海湾水深达到65m,海流最大流速也超过4m/s,大桥主塔采用90m直径沉箱基础。上述跨海桥梁处于近海,虽然水很深,海流影响大,但波浪影响较小。
2、但是,对于外海海峡修建的跨海桥梁,如我国规划建设的琼州海峡大桥,主通航孔的通航净空达到2650m×73m,工程海域不仅水深、流急,而且波浪巨大,观测到的最大波高已超过12m。如果在琼州海峡建设跨海大桥,桥梁的基础规模巨大,基础施工期波浪影响很大。我国的台湾海峡、印尼的巽他海峡上修建跨海桥梁,也将面临同样严峻的挑战。
3、外海特大型跨海大桥的基础规模很大,一般采用预制基础。预制基础在定位沉放过程中,大风、波浪、海流相互耦合且其影响很大,很难获得较长时间的良好海况作为施工窗口期,其施工安全和高精度定位沉放面临巨大的挑战。
4、因此,在跨海特大型桥梁深水预制基础定位沉放过程中,迫切需要研发定位沉放的智能控制方法,有效控制预制基础在大风、波浪、海流耦合作用下的运动响应,确保预制基础的施工安全和高精度定位沉放。
技术实现思路
1、(一)要解决的技术问题
2、有鉴于此,本发明的主要目的是为解决现有技术的不足,提供一种用于大型桥梁深水预制基础定位沉放的智能控制方法,以确保预制基础的施工安全和高精度定位沉放。
3、(二)技术方案
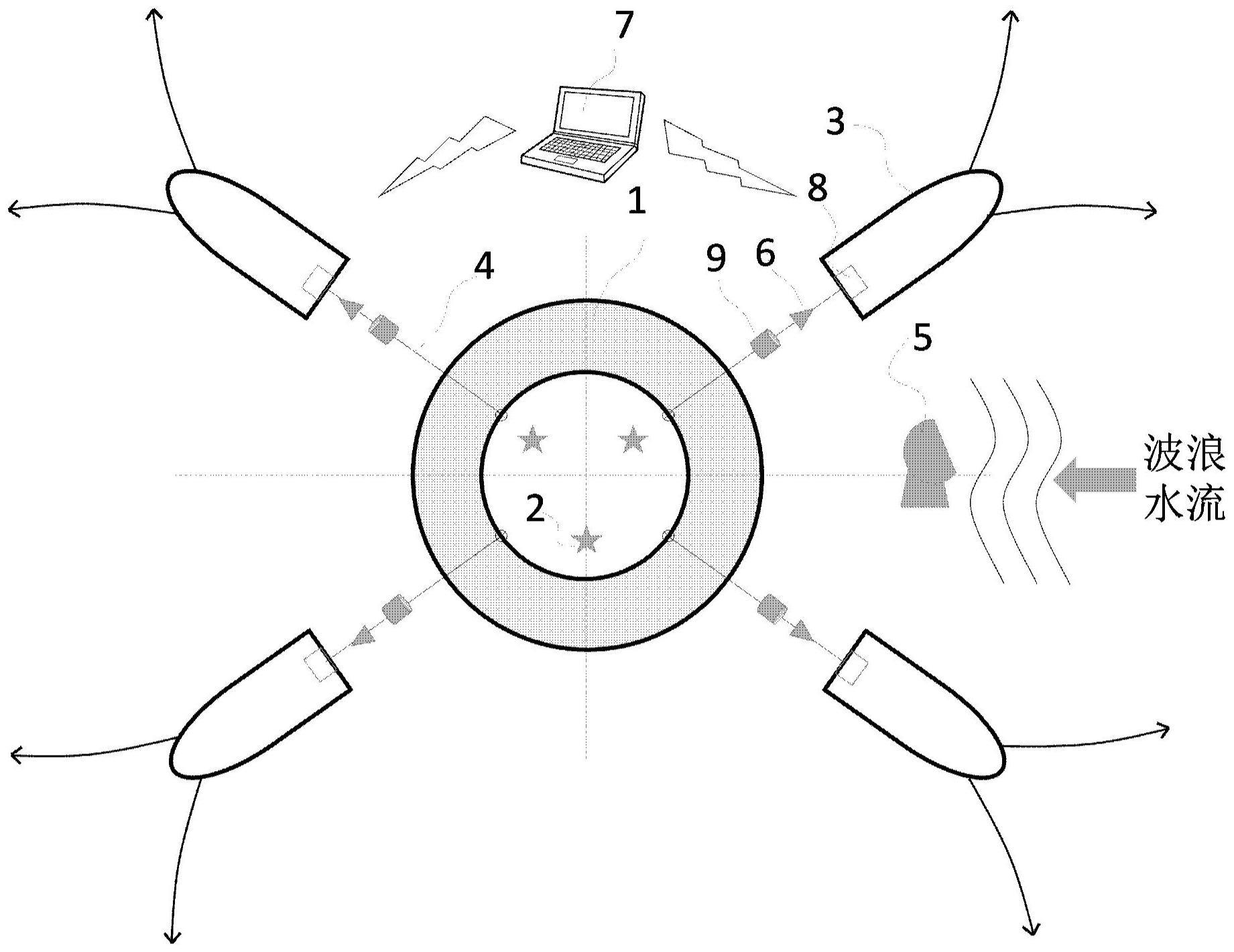
4、为达到上述目的,本发明提供了一种大型桥梁深水预制基础定位沉放智能控制方法,所述预制基础1的上部在水面之上,下部在水面之下,顶面安装i个定位装置2,四周布置j艘定位船舶3,其中,i为大于或等于3的自然数,j为大于或等于4的自然数,所述定位船舶3通过系泊缆索4连接于所述预制基础1,该方法是利用风、浪、流耦合作用下预制基础1沉放过程的运动方程,由智能调控中心7通过系泊缆索4对预制基础1的运动姿态进行智能调控。
5、上述方案中,所述定位装置2固定于所述预制基础1顶面具代表性的控制点,采用“5g+北斗”或“5g+gps”高精度定位技术同步监测预制基础1在下沉过程中控制点的三维坐标实时动态信息,进而获取预制基础1下沉过程中的实时动态运动响应。
6、上述方案中,所述定位船舶3在预制基础1周边水域呈水平轴对称布置,对称轴沿波浪主方向,且与通过预制基础1重心的竖轴相交。
7、上述方案中,每艘定位船舶3通过k条系泊缆索4与预制基础1的锚固点连接,其中k为大于或等于1的自然数;当预制基础1的高度h≥60m、水深d≥50m时,k≥2,其中至少1条系泊缆索4在预制基础1的锚固点位于预制基础1的重心以上,至少1条系泊缆索4在预制基础1的锚固点位于预制基础1的重心以下。
8、上述方案中,所述风、浪、流耦合作用下预制基础1沉放过程的运动方程为:
9、
10、其中,m、c、k为受预制基础1周围附加水体影响的质量矩阵、阻尼矩阵和刚度矩阵;x、分别为预制基础1的位移、速度和加速度,反映预制基础1的纵荡、横荡、垂荡、横摇、纵摇、艏摇等运动姿态;t为时间;fa为预制基础1在水面以上部分承受的风荷载,fw为预制基础1在水面以下部分承受的波浪荷载,fc为预制基础1在水面以下部分承受的水流荷载;ftj,k为第j艘定位船舶3上第k个系泊缆索4对预制基础1施加的智能控制力6,所述智能调控中心7通过调控施加至预制基础1的智能控制力6实现对预制基础1运动姿态的智能调控。
11、上述方案中,所述系泊缆索4上安装有力调节器8和力传感器9,其中,所述智能调控中心7通过所述力调节器8对施加至预制基础1的智能控制力6进行智能调控,所述智能调控中心7通过所述力传感器9对施加至预制基础1的智能控制力6进行实时采集。
12、上述方案中,所述智能调控中心7通过调控施加至预制基础1的智能控制力6实现对预制基础1运动姿态的智能调控,具体包括:所述智能调控中心7对风、浪、流耦合作用下预制基础1沉放过程的运动方程进行求解,得到应施加至预制基础1的智能控制力6,然后将得到的应施加至预制基础1的智能控制力6通过所述力调节器8施加至预制基础1,实现对预制基础1运动姿态的智能调控。
13、上述方案中,所述预制基础1位移x满足:x≤xlim,其中xlim为预制基础1最大运动位移限制,xlim可取预制基础1底面特征尺寸的1/2000或0.05m。
14、上述方案中,所述预制基础1沉放过程中受到的风荷载、波浪荷载、水流荷载,是根据预制基础1上的定位装置2监测的实际沉放深度,再利用风浪流临时监测站5获取施工海域的风、浪、流环境特征参数,采用理论计算公式或数值模拟技术实时计算得到的,或采用前期构建的风、浪、流特征参数与风荷载、波浪荷载、水流荷载的数据映射关系库直接得到的;根据上述分析得到的风荷载、波浪荷载、水流荷载,构成了不同沉放深度下预制基础1的风-浪-流耦合激励时程数据集10。
15、上述方案中,所述智能调控中心7包括制预处理模块11和线性二次型控制模块12,其中:所述控制预处理模块11根据短时荷载激励识别出线性二次型控制系统13中的最优权重系数14;根据风-浪-流耦合激励时程数据集10,通过时域-频域转换,得到频域图像数据集15;根据风-浪-流耦合激励时程数据集10,通过线性二次型控制算法及优化算法16,得到不同沉放深度下的最优权重系数数据集17;根据频域图像数据集15和最优权重系数数据集17,通过数据标注及深度学习算法训练,得到不同沉放深度下预制基础1的风-浪-流耦合激励时程与最优权重系数之间的深度学习模型18;所述线性二次型控制模块12包括线性二次型控制器19和线性二次型控制系统13,线性二次型控制系统13中的最优权重系数14是线性二次型控制系统13中的短时荷载激励频域图像,根据深度学习模型18得到的;在得到最优权重系数14后,线性二次型控制系统13根据最优权重系数14对风、浪、流耦合作用下预制基础1沉放过程的运动方程进行求解,得到应施加至预制基础1的智能控制力6;在预制基础1的沉放过程中,根据沉放深度分阶段求解各阶段的智能控制力6,直到预制基础1达到预定位置。
16、上述方案中,所述控制预处理模块11根据风-浪-流耦合激励时程数据集10,通过线性二次型控制算法及优化算法16,得到不同沉放深度下的最优权重系数数据集17的过程中,所述不同沉放深度下的最优权重系数数据集17是通过对遗传算法求解得到的,具体包括:首先,通过初始化权重系数种群;接着,根据选择种群参数完成不同沉放深度下预制基础1风-浪-流耦合激励时程分析;然后,进行适应度函数评价;接着,判别循环是否结束,若未达到结束条件,再进行选择、交叉、复制、变异产生新的种群;达到结束条件,输出最优权重系数数据集17;
17、其中,所述遗传算法中的适应度函数为:
18、
19、式中,xmax和x0,max为预制基础1有无控制下风-浪-流耦合激励的最大位移;和为预制基础1有无控制下风-浪-流耦合激励的最大速度;ftj,k,max和ftj,k,0,max为预制基础1有无控制下风-浪-流耦合激励的控制力;α、β、γ为权重系数,分别取0.5、0.3和0.2。
20、上述方案中,所述不同沉放深度下预制基础1风-浪-流耦合激励时程与最优权重系数之间的深度学习模型18为卷积神经网络模型,其中卷积层的层数≥3,池化层的层数≥3。
21、上述方案中,所述线性二次型控制系统13根据最优权重系数14对风、浪、流耦合作用下预制基础1沉放过程的运动方程进行求解,得到应施加至预制基础1的智能控制力6,具体包括:
22、所述线性二次型控制系统13中的二次型性能指标j为:
23、
24、式中,z为空间状态向量;q和r为得到最优权重系数16;上标t为矩阵转置;
25、智能控制力(6)通过如下计算方法得到:
26、atp+pa-pbr-1btp+q=0 (4)
27、式中,上标-1为矩阵的逆;a和b不同沉放深度下预制基础1风-浪-流耦合作用下的空间状态方程系数矩阵;
28、
29、式中,为动力风荷载、波浪、水流作用及系泊缆索4的智能控制力6的作用位置矩阵;根据求解得到的p,所述智能控制力ftj,k为:
30、ftj,k=-r-1btpz (6)。
31、(三)有益效果
32、本发明提供的大型桥梁深水预制基础定位沉放智能控制方法,具有益效果是:
33、1、本发明提供的大型桥梁深水预制基础定位沉放智能控制方法,通过“5g+北斗”或“5g+gps”高精度定位技术的定位装置实时监测预制基础的纵荡、横荡、垂荡、横摇、纵摇、艏摇运动,在此基础上考虑系泊缆索智能控制力,建立风、浪、流耦合作用下预制基础沉放过程的运动方程,通过建立的智能调控系统求解最优系泊缆索智能控制力,再利用系泊缆索的力调节器施加系泊缆索上,对预制基础的姿态进行多点同步高精度调控,确保预制基础高精度沉放在预设位置范围内。
34、2、本发明提供的大型桥梁深水预制基础定位沉放智能控制方法,预制基础施工过程中受到的风荷载、波浪荷载、水流荷载,是根据预制基础上的定位装置监测的实际沉放深度,再利用施工海域附近投放的风浪流临时观测站获取的风、浪、流环境特征参数,并采用理论计算公式或数值模拟技术实时计算得到的,或采用前期构建的风、浪、流特征参数与风荷载、波浪荷载、水流荷载的数据映射关系库直接得到的,可以准确获取不同沉放深度时预期基础的复杂受力状态,为预制基础的状态控制提供真实的数据基础。
35、3、本发明提供的大型桥梁深水预制基础定位沉放智能控制方法,智能调控中心包括制预处理模块和线性二次型控制模块,控制预处理模块能够根据短时荷载激励识别线性二次型控制系统中的最优权重系数,线性二次型控制模块根据最优权重系数确定智能控制力,并采用现代控制理论中的先进主动控制方法结合优化算法和深度学习方法,能够提升大型桥梁预制基础定位沉放过程中的精度和鲁棒性。
36、4、本发明提供的大型桥梁深水预制基础定位沉放智能控制方法,适用于深水海域特大型跨海桥梁预制基础的高精度定位沉放,大幅提升复杂环境下预制基础施工效率,扩大施工窗口期,能够提高施工过程的安全性、可靠性和精确性,并且经济性好、实用性强、应用范围广。
- 还没有人留言评论。精彩留言会获得点赞!