远程操作装置的制作方法
本发明涉及一种基于操作者的操作而对车辆进行远程操作的远程操作装置。
背景技术:
1、以往,已知有一种如专利文献1所公开的对作业机械进行远程操作的远程操作装置。在专利文献1的作业机械上安装有作为从机侧操作装置以及相机等的外界传感器,操作者可搭乘至远程操作装置,一边观察显示在显示器上的实机外面的样子,一边进行远程操作。
2、另外,作为与远程操纵装置相关的技术的再现实机搭乘时的临场感的方法,人们还研究了以下一种方法:检测出作业中的实机的振动及实机的上部回转体的旋转并将其发送给远程操纵装置,利用远程操纵装置再现搭乘实机时感受到的驾驶室的动作。
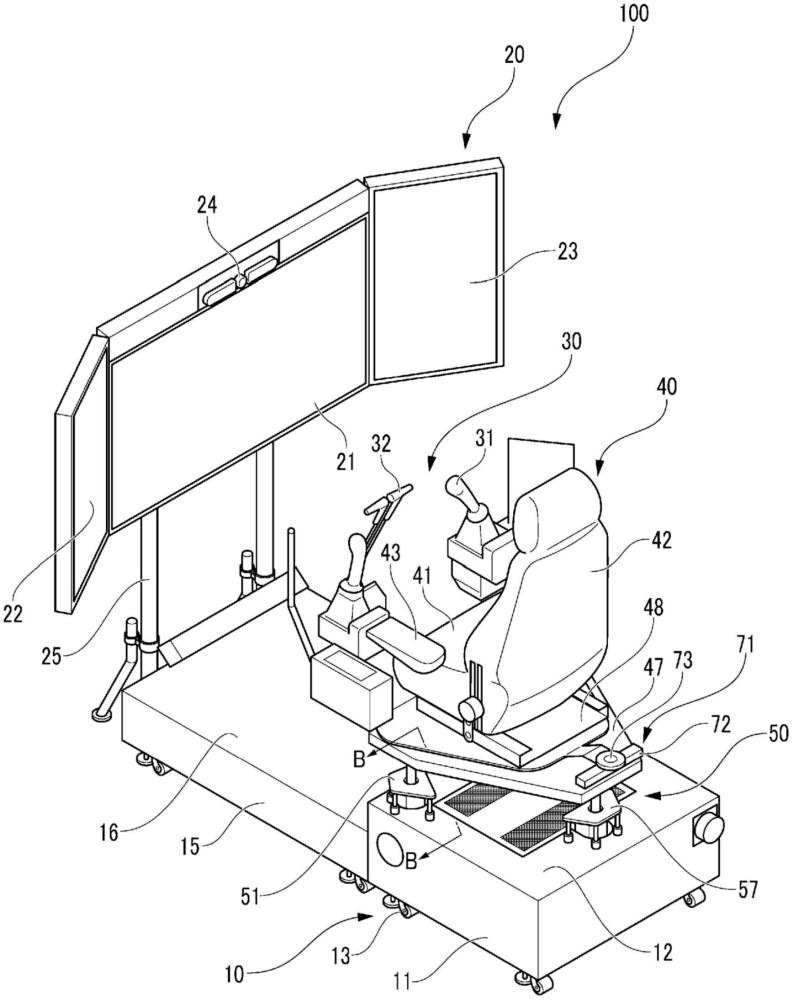
3、在采用上述远程操纵装置的情况下,操作者所搭乘的座椅装置可振动且可旋转,并构成为具备放置脚的脚保持部。脚保持部需要配置在比地板高的位置,以避免与地板干涉。利用以这种方式构成的远程操纵装置,操作者通过显示器上的相机影像和座椅装置的动作,能够以接近于实机搭乘时的感觉进行远程操作。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开2020-154851号公报
技术实现思路
1、发明要解决的课题
2、然而,若将脚保持部配置在比地板高的位置上时,则难以上下座椅装置。另外,在设置成将脚保持部配置得比地板高的结构的情况下,必须将脚保持部设置成牢固的结构,以使得该脚保持部在上下座椅装置时不会因体重而变形,因而重量以及制造成本增加。而且,还需要远程操作装置能够安全且高效地供远程操作。
3、为了解决上述问题,本发明的目的在于实现了一种容易上下的远程操作装置。此外,本发明的目的在于提供一种无需具备牢固的脚保持部就能够上下、并且能够安全且高效地进行远程操作的远程操作装置。
4、用于解决课题的手段
5、本发明的远程操作装置的特征在于,具有:受理操作者对机械的操作的操作模式以及操作者上下座椅装置的上下模式,在上下模式中,与所述操作模式相比,座椅装置的至少一部分位于接近地板的位置。
技术特征:
1.一种远程操作装置,其具备座椅装置,通过远程操作来操作机械,
2.根据权利要求1所述的远程操作装置,其特征在于,
3.根据权利要求2所述的远程操作装置,其特征在于,
4.根据权利要求1至3中任一项所述的远程操作装置,其特征在于,
5.根据权利要求1至4中任一项所述的远程操作装置,其特征在于,
6.根据权利要求5所述的远程操作装置,其特征在于,
7.根据权利要求6所述的远程操作装置,其特征在于,
8.根据权利要求6或7所述的远程操作装置,其特征在于,
9.根据权利要求1至8中任一项所述的远程操作装置,其特征在于,
10.根据权利要求1至9中任一项所述的远程操作装置,其特征在于,
技术总结
本发明的目的在于提供一种易于上下的远程操作装置、且无需具备牢固的脚保持部就能够上下的远程操作装置。远程操作装置具备座椅装置(40),通过远程操作来操作机械。远程操作装置具有受理操作者对所述机械的操作的操作模式以及操作者上下座椅装置(40)的上下模式。在上下模式下,与操作模式相比,座椅装置(40)的至少一部分处于接近地板的位置。
技术研发人员:大谷真辉,佐佐木均,山崎洋一郎
受保护的技术使用者:神钢建机株式会社
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!