一种基于液压振动锤的智能打桩系统的制作方法
本发明涉及水利水电施工领域,尤其涉及一种基于液压振动锤的智能打桩系统。
背景技术:
1、在水利水电工程中,打桩是非常重要的环节,它能够将桩锤锤击地面,将桩锤从地面下沉到特定深度,以形成稳定的支护结构;目前,传统打桩的方式是通过使用常规的全站仪放点的模式,但这种方式作业效率低,需要人工现场放样,智能化不足,且受天气等外界因素的影响较为严重,且容易存在因桩体的垂直度同方向的偏差累计导致部分桩体垂直度偏差较大的问题。
2、中国专利cn108805393a提供了一种基于北斗高精度智能打桩方法和系统,打桩方法包括:任务派发步骤,包括用户通过打桩云平台创建任务并分发所述任务至司机端;任务操作步骤,包括司机通过司机端接收任务并通过司机端控制桩机至目标位置进行作业并将位置数据通过gnss定位系统反馈至打桩云平台;任务监测步骤,包括用户通过用户管理端实时监测桩机的作业状况,使得打桩位置更为精确,且受环境影响较小,但是仍然存在因桩体的垂直度同方向的偏差累计导致部分桩体垂直度偏差较大的问题。
技术实现思路
1、为此,本发明提供一种基于液压振动锤的智能打桩系统,能够解决因桩体的垂直度同方向的偏差累计导致部分桩体垂直度偏差较大的问题。
2、为实现上述目的,本发明提供一种基于液压振动锤的智能打桩系统,包括:
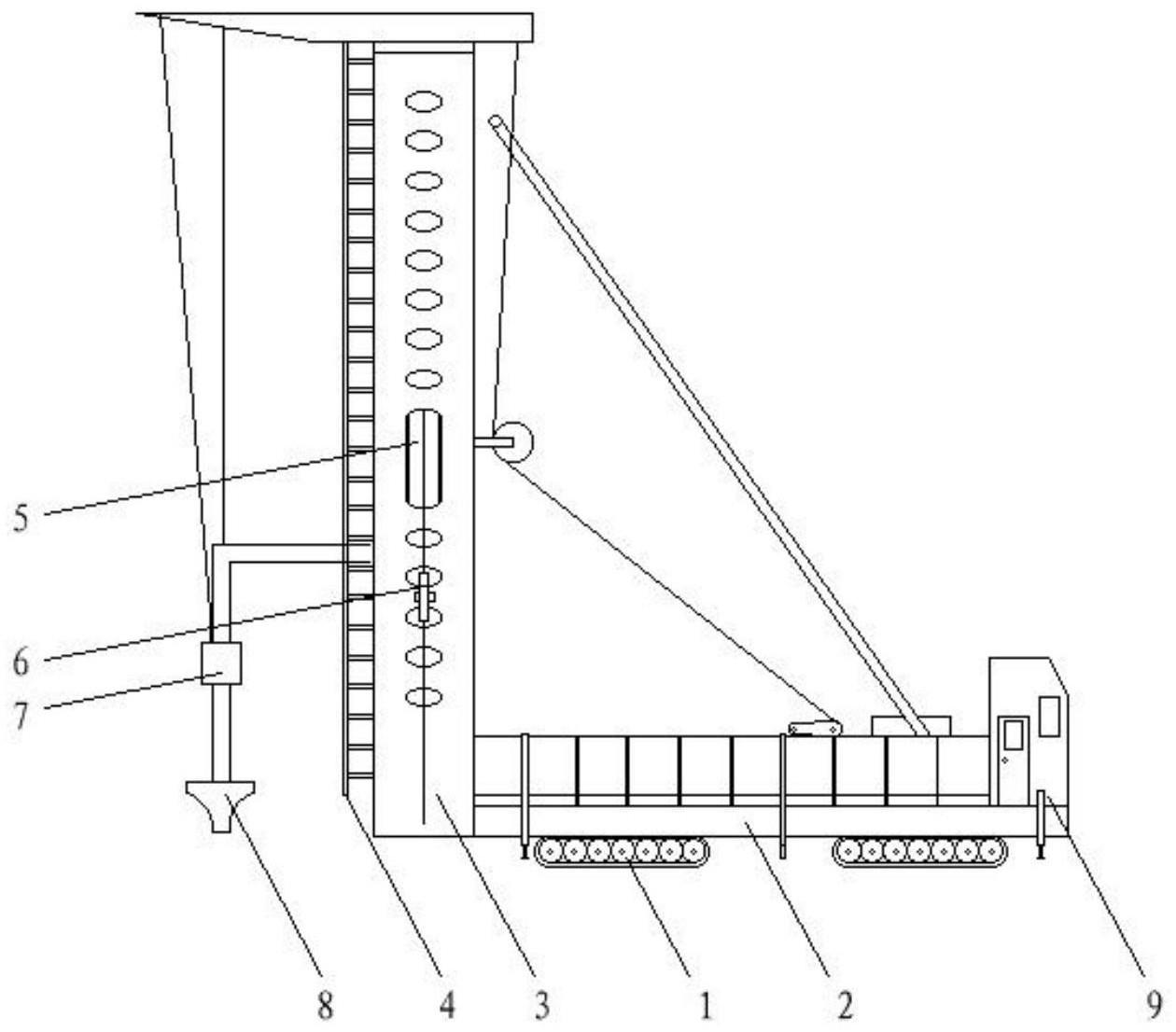
3、底座,其包括用于移动的履带装置;
4、桩架,其设置于所述底座上方;
5、导向架,其与所述桩架相连接,用于控制桩体垂直贯入地层;
6、卷扬机,其与所述桩架相连接,用于对垂直度偏差较大的桩体的桩顶施加拉力以使桩体的垂直度满足要求;
7、液压振动锤,其包括用于通过高频振动使桩体沉降的桩锤,其中,所述桩锤包括用于控制激振力的激振器;
8、控制单元,其包括:
9、信息采集模块,其用于根据桩体排布设计图获取各桩体的入桩设计深度以及桩顶中心的排布位置,将各桩体的桩顶中心连线形成轮廓线;
10、区域分割模块,其与所述信息采集模块相连接,用于根据所述轮廓线的曲率突变点以及轮廓线的等距分割点获取定位桩;
11、定位模块,其与所述区域分割模块相连接,用于根据当前定位桩的桩顶中心点与下一定位桩的桩顶中心点在轮廓线上的间距获取当前定位桩的一次入桩深度,根据当前定位桩的一次入桩深度获取当前定位桩的一次入桩垂直度允许偏差,根据当前定位桩的一次入桩深度获取其它桩的一次入桩深度,并根据其它桩的一次入桩深度获取其它桩的二次入桩深度;
12、纠偏模块,其与所述定位模块相连接,用于根据当前定位桩的垂直度获取所述卷扬机对当前定位桩桩顶的拉力;
13、调节模块,其与所述定位模块相连接,用于根据各桩体的单次入桩深度对所述液压振动锤的激振力进行调节。
14、进一步地,所述区域分割模块在第一划分判定条件下获取ⅰ类定位桩,在第二划分判定条件下获取ⅱ类定位桩,
15、其中,所述第一划分判定条件为轮廓线中存在曲率突变点,所述第二划分判定条件为轮廓线中不存在曲率突变点,设定ⅰ类定位桩为桩顶中心点与轮廓线的曲率突变点距离最近的桩体,设定ⅱ类定位桩为桩顶中心点距轮廓线的等距分割点最近的若干桩,其中,轮廓线的等距分割点数量通过轮廓线周长确定。
16、进一步地,所述区域分割模块在第一划分判定条件下根据ⅰ类定位桩之间的距离判定是否获取ⅲ类定位桩,其中,
17、所述区域分割模块在第一距离判定条件下获取ⅲ类定位桩;
18、所述区域分割模块在第二距离判定条件下不获取ⅲ类定位桩;
19、其中,所述第一距离判定条件为上一ⅰ类定位桩的桩顶中心点与下一ⅰ类定位桩的桩顶中心点之间的距离大于预设分割距离阈值,所述第二距离判定条件为上一ⅰ类定位桩的桩顶中心点与下一ⅰ类定位桩的桩顶中心点之间的距离小于等于预设分割距离阈值,设定ⅲ类定位桩为桩顶中心点与上一ⅰ类定位桩和下一ⅰ类定位桩之间的轮廓线的等距分割点距离最近的若干桩,其中,上一ⅰ类定位桩和下一ⅰ类定位桩之间的轮廓线的等距分割点数量通过上一ⅰ类定位桩和下一ⅰ类定位桩之间的轮廓线长度确定。
20、进一步地,所述定位模块在第一间距条件下获取当前定位桩的一次入桩深度为h1,在第二间距条件下获取当前定位桩的一次入桩深度为h2,其中,
21、所述第一间距条件为当前定位桩的桩顶中心点与下一定位桩的桩顶中心点在轮廓线上的间距小于等于定位桩预设标准间距,所述第二间距条件为当前定位桩的桩顶中心点与下一定位桩的桩顶中心点在轮廓线上的间距大于定位桩预设标准间距;
22、其中,所述定位模块在所述第一间距条件、所述第二间距条件下获取的当前定位桩的一次入桩深度通过当前定位桩的桩顶中心点与下一定位桩的桩顶中心点在轮廓线上的间距以及入桩设计深度确定。
23、进一步地,所述定位模块在第一入桩深度判定条件下获取当前定位桩的一次入桩垂直度允许偏差值为第一允许偏差;所述定位模块在第二入桩深度判定条件下获取当前定位桩的一次入桩垂直度允许偏差值为第二允许偏差,其中,
24、所述第一入桩深度判定条件为当前定位桩的一次入桩深度小于等于2/3倍的当前定位桩的入桩设计深度,所述第二入桩深度判定条件为当前定位桩的一次入桩深度大于2/3倍的当前定位桩的入桩设计深度;
25、其中,在所述第一入桩深度判定条件、所述第二入桩深度判定条件下获取的当前定位桩的一次入桩垂直度允许偏差值通过当前定位桩的一次入桩深度以及当前定位桩的桩顶中心点分别与上一定位桩的桩顶中心点和下一定位桩的桩顶中心点在轮廓线上的间距的平均值确定。
26、进一步地,所述定位模块根据与所述激振器相连接的锤杆的下移距离及当前定位桩的下沉高度的对比结果判定当前定位桩的垂直度是否合格,其中,
27、所述定位模块在第一沉入量条件下判定当前定位桩的垂直度合格;
28、所述定位模块在第二沉入量条件下判定当前定位桩的垂直度不合格;
29、其中,所述第一沉入量条件为所述锤杆的下移距离与当前定位桩的下沉高度的比值小于等于当前定位桩的一次入桩垂直度允许偏差值,所述第二沉入量条件为锤杆的下移距离与当前定位桩的下沉高度的比值大于当前定位桩的一次入桩垂直度允许偏差值。
30、进一步地,所述纠偏模块在所述第二沉入量条件下启动所述卷扬机以将定位桩顶部向倾斜的方向反拉,其中,
31、所述纠偏模块在第一垂直度判定条件下获取所述卷扬机对当前定位桩桩顶的拉力为第一拉力;
32、所述纠偏模块在第二垂直度判定条件下获取所述卷扬机对当前定位桩桩顶的拉力为第二拉力;
33、其中,所述第一垂直度判定条件为锤杆下移距离与当前定位桩的下沉高度的比值小于等于1.05,所述第二垂直度判定条件为锤杆下移距离与当前定位桩的下沉高度的比值大于1.05;
34、其中,在所述第一垂直度判定条件、所述第二垂直度判定条件下获取的对当前定位桩桩顶的拉力通过当前定位桩的下沉高度确定。
35、进一步地,所述定位模块在所述第一沉入量条件下获取当前定位桩与下一定位桩之间的其它桩的一次入桩深度,其中,
36、所述定位模块在所述第一入桩深度判定条件下获取所述其它桩的一次入桩深度为h11;
37、所述定位模块在所述第二入桩深度判定条件下获取所述其它桩的一次入桩深度为h12;
38、其中,在所述第一入桩深度判定条件、所述第二入桩深度判定条件下获取的所述其它桩的一次入桩深度通过各定位桩的垂直度允许偏差值以及当前定位桩的桩顶中心点与下一定位桩的桩顶中心点在轮廓线上的间距确定。
39、进一步地,所述定位模块根据所述其它桩的一次入桩深度获取其它桩的二次入桩深度,其中,
40、所述定位模块在第一判定条件下获取所述其它桩的二次入桩深度为h21;
41、所述定位模块在第二判定条件下获取所述其它桩的二次入桩深度为h22;
42、其中,所述第一判定条件为所述其它桩的一次入桩深度小于等于0.5倍的其它桩桩身长度,所述第二判定条件为所述其它桩的一次入桩深度大于0.5倍的其它桩桩身长度;
43、其中,在所述第一判定条件、所述第二判定条件下获取的所述其它桩的二次入桩深度通过其它桩的一次入桩深度确定。
44、进一步地,所述调节模块根据各桩体的单次入桩深度对所述激振器的激振力进行调节,其中,
45、所述调节模块在第一单次入桩深度条件下获取所述激振器的激振力为第一激振力;
46、所述调节模块在第二单次入桩深度条件下获取所述激振器的激振力为第二激振力;
47、其中,所述第一单次入桩深度条件为单次入桩深度小于等于2/3倍的桩身长度,所述第二单次入桩深度条件为单次入桩深度大于2/3倍的桩身长度;
48、其中,在所述第一单次入桩深度条件、所述第二单次入桩深度条件下获取的所述激振器的激振力通过各桩体的单次入桩深度确定。
49、与现有技术相比,本发明的有益效果在于,本发明设置区域分割模块,通过定位桩的设置将全部桩体划分为若干施工区,通过对定位桩垂直度的控制以及区域的划分,能够保证各桩体的垂直度偏差收到范围限制,避免因一根桩体的位置及垂直度出现偏差而影响后续施工的全部桩体,本发明设置定位模块,能够通过多次入桩保证当桩体垂直度偏差较大时及时纠偏,由于入桩越深,土体给予桩体的约束力越大,纠偏越困难,通过分次入桩能够在桩体入桩前及时对桩体垂直度纠偏,减小施工难度,提高施工效率,本发明设置纠偏模块,通过对桩顶向倾斜方向反拉能够及时对桩体垂直度进行调整,本发明设置调节模块,其根据桩体的入桩深度对液压振动锤的激振力进行调节,能够保证入桩速度,进而提高施工效率。
50、尤其,本发明设定当轮廓线中存在曲率突变点时以距曲率突变点距离最近的桩体作为ⅰ类定位桩,设定当轮廓线不存在曲率突变点时设定距轮廓线的各等距分割点最近的桩体为定位桩,能够减小打桩难度,对等距分割点数量及位置的控制,能够保证围护桩整体位置不会发生偏移,等距分割点数量过多会影响施工进度,等距分割点数量过少会增加对打桩的过程性把控的难度,因此通过桩体中心点连线的长度作为影响等距分割点数量的因子,能够平衡施工效率和施工质量。
51、尤其,本发明为避免轮廓线中曲率突变点间距离过长,也即相邻量定位桩之间桩体数量较多,不容易对入桩垂直度及质量进行过程性把控,因此当获取i类定位桩时需再次获取各相邻i类定位桩之间的轮廓线长度,若两根相邻的i类定位桩之间的轮廓线长度较大,在所述两相邻的i类定位桩之间设置ⅲ类定位桩,以实现对各其它桩的入桩垂直度进一步把控。
52、尤其,本发明根据相邻两定位桩之间在轮廓线上的间距以及桩体的入桩设计时候森都获取定位桩的一次入桩深度,当两定位桩在轮廓线上的间距较大时,选择较大的一次入桩深度有利于其它桩垂直度的控制,避免因靠近定位桩的其它桩因其垂直度偏差较大而影响定位桩的垂直度,当两定位桩在轮廓线上的间距较小时,选取较小的一次入桩深度能够有利于纠偏,实现对各桩体垂直度的校正。
53、尤其,由于本发明的定位桩是基于距等距分割点最近的桩体选取的,因此当前定位桩与上一定位桩的距离和当前定位桩与下一定位桩的距离并不完全一致,因此选取两者的平均值作为影响入桩垂直度允许偏差的影响因素之一,两定位桩相邻越近,定位桩之间的其它桩数量越少,对整体的围护结构影响越小,因此可以选取较大的垂直度偏差,同样的,一次入桩深度越小,其纠偏难度越小,因此对于垂直度偏差的要求也相对更低。
54、尤其,本发明设定卷扬机的拉力通过垂直度偏差以及当前定位桩的下沉高度确定,垂直度偏差越大,相应收到的倾斜的土体压力较大,同样的,定位桩的下沉高度越高,定位桩受到的水平力越大,因此当垂直度偏差较大或定位桩的下沉高度较大时,卷扬机选取较大拉力,能够对桩体进行有效纠偏,当垂直度偏差较小或定位桩下沉高度较小时,较大的反拉力可能会导致反向偏移,因此选择足够纠偏但相对较小的反拉力使其垂直度校准。
55、尤其,本发明根据定位桩的一次入桩深度获取其它桩的一次入桩深度,本发明设定其它桩的一次入桩深度小于定位桩的一次入桩深度,能够保证当其它桩垂直度偏差较大对定位桩产生侧向应力时对定位桩自身的位置及垂直度产生较小的影响,且通过较小的一次入桩深度使其它桩受到的土体侧向应力较小,能够在其它桩集体出现垂直度偏差时同时对多根定位桩进行纠偏。
56、尤其,本发明通过对当前定位桩与下一定位桩之间其它桩二次入桩深度的确定,能够为其它桩再次预留纠偏范围,保证桩体的垂直度,通过多次入桩能够有效实现对桩体入桩的过程性把控。
- 还没有人留言评论。精彩留言会获得点赞!