一种清污门机液压抓斗监控系统及爪臂可调抓斗的制作方法
本发明涉及清污门机液压抓斗领域,特别是一种清污门机液压抓斗监控系统及爪臂可调抓斗。
背景技术:
1、清污门机液压抓斗是一种专门用于清除拦污栅处污物的设备,通常用于处理大型污水处理系统和水处理厂。拦污栅通常位于接收水体流入水处理设施前,用于截留较大的固体废物,避免其对设备产生损坏或对后续处理工艺产生影响,但需要使用液压抓斗对拦挡下来的废物进行定期清除,对然而由于液压抓斗是一种可远程操控的抓取类吊具,而传统的机械式抓斗工作效率较低,不方便进行远程操控并且没有对应的自动化操作系统,不能实现定点操作等远程监控。而现在的清污门机液压抓斗清污效果不佳,由于清污门机液压抓斗之间的耙斗之间距离过大导致污物滞留能力差,难以抓取细小的垃圾、枯树枝等,甚至清污机下潜能力有限,导致难以抓取较深河床底部的垃圾,可能无法有效清理拦污栅河床前的污物,导致堵塞或溢流等问题。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述或现有技术中清污效果不佳的问题,提出了本发明。
3、因此,本发明的目的是提供一种爪臂可调抓斗,其能解决对深层污物难以清理的问题。
4、为解决上述技术问题,本发明提供如下技术方案:液压抓斗控制系统包括互相连接的抓斗闭合监测模块、液压抓斗控制模块、与所述液压抓斗控制模块连接的定时模块,以及调节臂控制模块。
5、作为本发明所述爪臂可调抓斗的一种优选方案,其中:所述液压抓斗控制系统固定安装在吊柱,所述抓斗闭合监测模块安装在前耙齿单元上。
6、作为本发明所述爪臂可调抓斗的一种优选方案,其中:抓斗闭合监测模块包括卸荷阀,以及压力传感器;所述卸荷阀与液压驱动件连接;所述抓斗闭合监测模块连接在所述卸荷阀的控制端,用于监控所述卸荷阀接收到的卸荷控制信号;所述压力传感器用来检测压力缸受到压力值。
7、作为本发明所述爪臂可调抓斗的一种优选方案,其中:所述液压抓斗控制模块包括液压抓斗定位装置,以及与所述液压抓斗控制模块连接的报警模块。
8、作为本发明所述爪臂可调抓斗的一种优选方案,其中:所述液压抓斗控制模块通过所述液压抓斗定位装置监控液压抓斗的深度位置。
9、作为本发明所述爪臂可调抓斗的一种优选方案,其中:所述调节臂控制模块安装在控制臂爪尾部;其包括供油模块、与所述供油模块连接的泄压模块,以及与所述泄压模块连接的角度传感器。
10、作为本发明所述爪臂可调抓斗的一种优选方案,其中:所述角度传感器用于检测伸缩齿的抓斗开合角度;所述角度传感器检测伸缩齿转动角度,来控制泄压模块供油模块向液压缸定时定量提供液压油
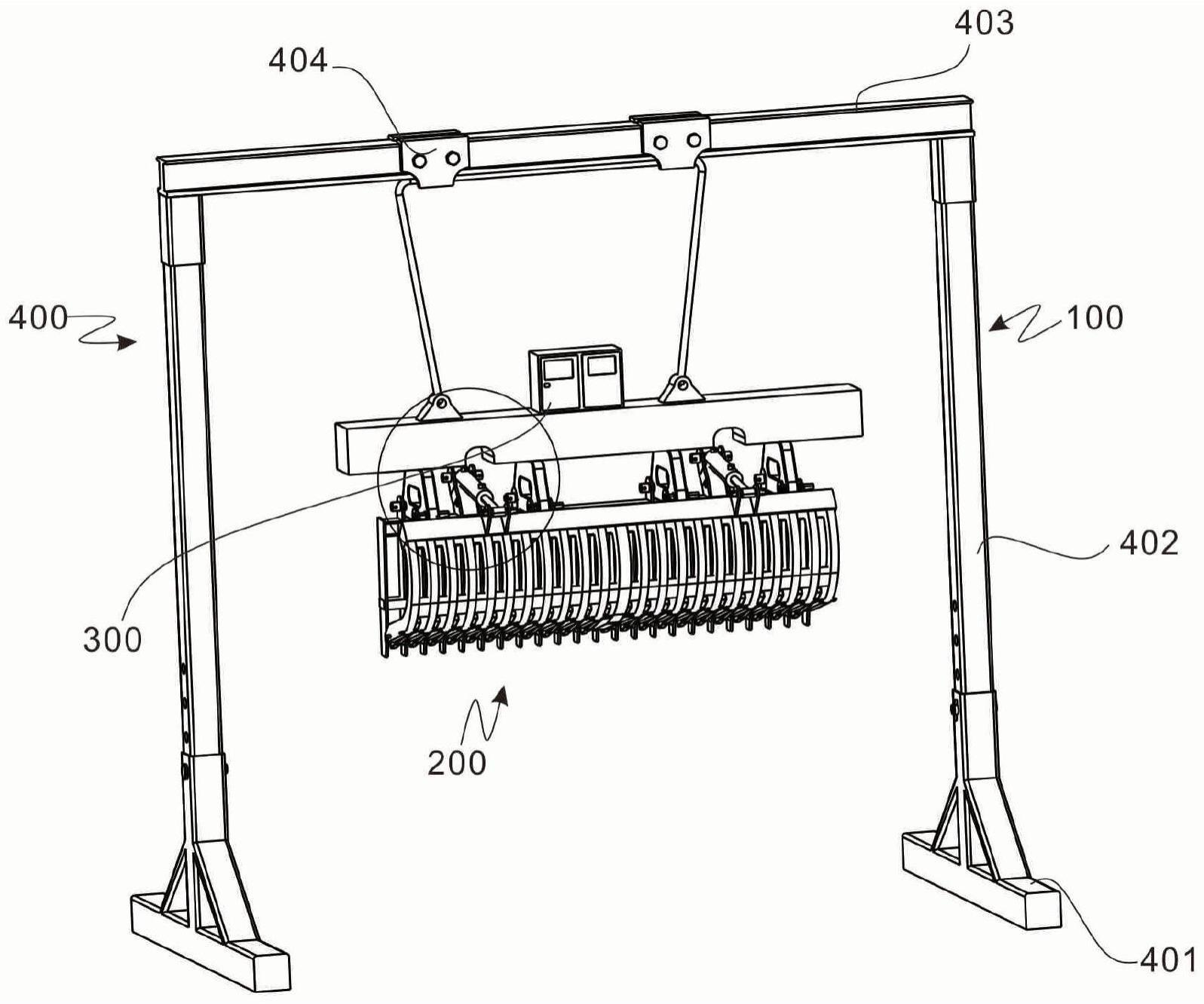
11、作为本发明所述爪臂可调抓斗的一种优选方案,其中:承重单元,包括承重座、设置于所述承重座一侧的承重臂、设置于所述承重臂顶部的门梁,以及设置于所述门梁上的卷绳机;
12、吊装单元,包括所述吊柱、设置于所述吊柱底部的多组悬挂环、设置于所述悬挂环底部的铰接件、设置于所述铰接件底部的后耙齿组件,以及设置于所述吊柱底部的驱动组件;
13、前耙齿单元,包括前耙齿底座、设置于所述前耙齿底座中间的驱动爪组件、设置于所述驱动爪组件一侧的多组伸缩齿组件,以及设置于所述伸缩齿组件一侧的多组固定前耙齿。作为本发明所述爪臂可调抓斗的一种优选方案,其中:所述卷绳机与所述门梁活动连接。
14、作为本发明所述爪臂可调抓斗的一种优选方案,其中:
15、所述后耙齿组件包括后耙齿底座、设置于所述后耙齿底座的多组直形齿爪,以及设置于所述直形齿爪之间的固定隔离板;
16、所述驱动组件包括液压驱动件、铰接设置于所述液压驱动件一侧的前支撑座,以及铰接设置于所述液压驱动件另一侧的后支撑座;
17、所述前支撑座与所述前耙齿底座固定连接,所述后支撑座与所述后耙齿底座固定连接;
18、所述驱动爪组件包括控制臂爪、设置于所述控制臂爪内侧的蜗轮、设置于所述蜗轮一侧的传动组件、设置于所述蜗轮一侧的蜗杆、设置于所述传动组件一侧的液压缸,以及设置于所述传动组件一侧的多组固定架;
19、所述蜗轮固定连接在所述控制臂爪内侧;所述蜗轮与所述蜗杆齿轮配合;
20、所述传动组件包括伸缩轴、固定设置于所述伸缩轴端部的连接扣、设置于所述连接扣内侧的螺旋筒、设置于所述螺旋筒一端的固定轴、设置于所述螺旋筒外侧的套筒,以及开设于套筒一端的开槽;
21、所述伸缩轴固定连接在所述液压缸的输出端;所述连接扣与所述螺旋筒上的螺旋轨道相滑动配合;所述固定轴与所述开槽活动连接;
22、伸缩齿组件包括限位组件、设置于所述限位组件一侧的伸缩齿、贯通设置于所述伸缩齿内部的驱动轴,以及设置于所述驱动轴上的齿圈;
23、所述限位组件包括设置于所述伸缩齿两侧的弧形限位槽、设置于所述固定前耙齿两侧的垫板,以及设置于所述固定前耙齿两侧的限位块;
24、所述伸缩齿以所述驱动轴为轴心,一端占全长五分之四,另一端占全长五分之一。
25、本发明的有益效果:本发明通过液压抓斗控制系统、吊装单元和前耙齿单元的设置,使得本装置可以实现对前耙齿臂长的远程控制,在未翻转时,伸缩齿组件存放在固定前耙齿之间,这样可以减少固定前耙齿之间的齿距,并且提高清污能力,实现对细小垃圾的捞取;实现翻转时,伸缩齿组件伸出固定前耙齿,延长前耙齿臂长,可以实现对较深河床底部的污物清理,甚至可以将伸缩齿组件旋转不同角度,从而提高对垃圾的抓取能力。
技术特征:
1.一种清污门机液压抓斗监控系统,其特征在于:包括,
2.如权利要求1所述的清污门机液压抓斗监控系统,其特征在于:
3.如权利要求2所述的清污门机液压抓斗监控系统,其特征在于:
4.如权利要求1、2或3所述的清污门机液压抓斗监控系统,其特征在于:
5.如权利要求4所述的清污门机液压抓斗监控系统,其特征在于:
6.根据权利要求4所述的清污门机液压抓斗监控系统,其特征在于:
7.如权利要求6所述的清污门机液压抓斗监控系统,其特征在于:
8.一种爪臂可调抓斗,其特征在于:包括
9.如权利要求8所述的爪臂可调抓斗,其特征在于:
10.如权利要求8或9所述的爪臂可调抓斗,其特征在于:
技术总结
本发明公开了一种清污门机液压抓斗监控系统及爪臂可调抓斗,包括液压抓斗控制系统,吊装单元,包括吊柱、设置于吊柱底部的多组吊环、设置于吊环底部的连接组件、设置于连接组件底部的后耙齿组件,以及设置于吊柱底部的驱动组件;前耙齿单元,包括前耙齿底座、设置于前耙齿底座两侧的控制臂组件、设置于控制臂组件一侧的多组伸缩齿组件,以及设置于伸缩齿组件一侧的多组固定前耙齿。本发明的有益效果为使得本装置可以实现对前耙齿臂长的控制,实现对前耙齿之间的齿距减小,提高污物滞留能力,实现对细小垃圾的捞取;实现对较深河床底部的污物清理,甚至在伸缩齿组件旋转不同角度时提高对垃圾的抓取能力。
技术研发人员:刘成杰,叶刚,唐驰,何诗豪,邹杨瑞,唐磊,杨军,杨超
受保护的技术使用者:贵州乌江水电开发有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!