电动装载机行走控制方法、控制装置和装载机与流程
本发明涉及一种电动装载机,更具体地说,涉及一种电动装载机行走控制方法、控制装置和装载机。
背景技术:
1、电动装载机特别是四轮独立驱动装载机,由于不需要变速箱和驱动桥,传动系统结构简单、传动效率高,没有了变速箱和驱动桥的技术限制,装载机可以更容易向大吨位发展,但由于四轮独立驱动技术本身的复杂性,以及装载机作业工况的复杂性,传统电动汽车行走控制方法难以完全适应装载机四轮独立驱动行走控制的需求。如何能够更好的控制装载机行驶以及提高行驶的操控性能,这是正待解决的问题。
技术实现思路
1、本发明要解决的技术问题是四轮独立驱动电动装载机行走打滑时的控制问题,而提供一种电动装载机行走控制方法、控制装置和装载机。
2、本发明为实现其目的的技术方案是这样的:构造一种电动装载机行走控制方法,装载机的四轮均配置各自相互独立驱动电机,控制方法包括如下步骤:
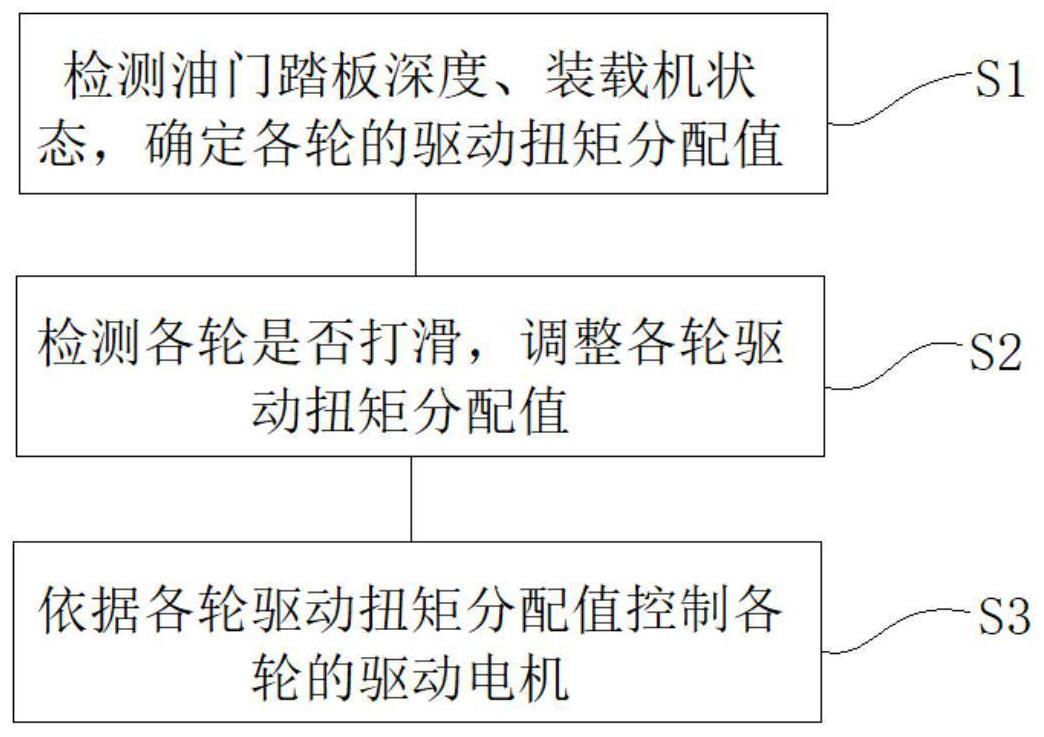
3、s1:检测油门踏板深度,依据油门踏板深度确定装载机驱动总扭矩,并按驱动总扭矩分配各轮的驱动扭矩;
4、s2:检测前后四轮的驱动电机转速并推定各轮是否打滑,打滑轮所在前轮或后轮中两轮的驱动扭矩分配值在对应轮当前驱动扭矩分配值基础上按比例逐渐减小至打滑轮不打滑,在维持预定时间后将各轮驱动扭矩分配值恢复至减小之前的值;
5、s3:依据各轮的驱动扭矩分配值对各轮的驱动电机进行控制。
6、在本发明电动装载机行走控制方法中,检测装载机状态且在铲装运输阶段时依据动臂油缸压力推算铲斗内物料重量,根据铲斗内物料重量推算结果确定驱动扭矩的铲运调整值;
7、在步骤s1中,各轮分配的驱动扭矩为驱动总扭矩平均分配至各轮上的平均值,检测到装载机处于铲装运输阶段时前轮驱动扭矩分配值调整为当前驱动扭矩分配值和铲运调整值的和值,后轮驱动扭矩分配值调整为当前驱动扭矩分配值和铲运调整值的差值。
8、在本发明电动装载机行走控制方法中,检测装载机的转向角度,并依据转向角度确定内外侧轮驱动扭矩的转向调整值;
9、在步骤s1中,在装载机处于转向状态时,转向内侧轮的驱动扭矩分配值调整为该轮当前驱动扭矩分配值与转向调整值的差值,转向外侧轮的驱动扭矩分配值调整为该轮当前驱动扭矩分配值与转向调整值的和值。
10、在本发明电动装载机行走控制方法中,在步骤s2中,在检测到仅有前轮或者后轮中具有轮打滑时,打滑轮所在前轮或后轮中两轮减少的驱动扭矩分配值等量增加至另外两轮的驱动扭矩分配值上。
11、在本发明电动装载机行走控制方法中,打滑轮驱动扭矩减小的速率与打滑轮的驱动电机的转速增加速率成正比例关系。
12、在本发明电动装载机行走控制方法中,在步骤s2中,在检测到仅有前轮或者后轮中具有轮打滑时且检测油门踏板深度,油门踏板加深所产生的驱动总扭矩增加值增加到前轮或后轮中不具有打滑轮的两轮的驱动扭矩分配值上,在检测到前轮和后轮中均具有轮打滑时驱动总扭矩不跟随油门踏板的踩踏深度增加;在检测到前轮或者后轮中具有轮打滑时,前轮和后轮的驱动扭矩随油门踏板的踩踏深度减小同步减小。
13、在本发明电动装载机行走控制方法中,当装载机处于铲装阶段且检测到后轮打滑,同时伴有收斗动作,则控制铲斗电磁阀组对应收斗动作的电流自动增加至设定值,并对铲斗电磁阀组对应收斗动作的电流进行间歇性增大和减小控制,持续设定时间后退出对铲斗电磁阀组电流的自动控制;当装载机处于铲装阶段且检测到前轮打滑,则控制动臂电磁阀组使动臂自动提升设定高度后退出动臂自动提升控制。
14、在本发明电动装载机行走控制方法中,在步骤s2中,当驱动轮的驱动电机转速与所有驱动电机转速平均值的差值大于设定值,或者驱动轮的驱动电机转速与该驱动轮当前驱动扭矩所对应的驱动电机转速设定上限值的差值大于预定值时推定该驱动轮打滑。
15、本发明为实现其目的的技术方案是这样的:构造一种控制装置,其包括处理器和存储器,所述存储器中存储有控制程序,所述控制程序由所述处理器加载并执行以实现如前述电动装载机行走控制方法。
16、本发明为实现其目的的技术方案是这样的:构造一种装载机,具有前述的控制装置。
17、本发明与现有技术相比,本发明在电动装载机驱动轮打滑时在对前后轮驱动扭矩进行调节的同时结合对工作装置的自动控制,减少打滑,提高电动轮驱动效率。
技术特征:
1.一种电动装载机行走控制方法,其特征在于,装载机的四轮均配置各自相互独立驱动电机,控制方法包括如下步骤:
2.根据权利要求1所述的电动装载机行走控制方法,其特征在于,
3.根据权利要求2所述的电动装载机行走控制方法,其特征在于,
4.根据权利要求1至3中任一项所述的电动装载机行走控制方法,其特征在于,
5.根据权利要求1至3中任一项所述的电动装载机行走控制方法,其特征在于,在步骤s2中,打滑轮驱动扭矩减小的速率与打滑轮的驱动电机的转速增加速率成正比例关系。
6.根据权利要求1至3中任一项所述的电动装载机行走控制方法,其特征在于,
7.根据权利要求1至3中任一项所述的电动装载机行走控制方法,其特征在于,当装载机处于铲装阶段且检测到后轮打滑,同时伴有收斗动作,则控制铲斗电磁阀组对应收斗动作的电流自动增加至设定值,并对铲斗电磁阀组对应收斗动作的电流进行间歇性增大和减小控制,持续设定时间后退出对铲斗电磁阀组电流的自动控制;当装载机处于铲装阶段且检测到前轮打滑,则控制动臂电磁阀组使动臂自动提升设定高度后退出动臂自动提升控制。
8.根据权利要求1所述的电动装载机行走控制方法,其特征在于,
9.一种控制装置,其包括处理器和存储器,所述存储器中存储有控制程序,其特征在于,所述控制程序由所述处理器加载并执行以实现如权利要求1-8任一项所述的电动装载机行走控制方法。
10.一种装载机,其特征在于,具有权利要求9中所述的控制装置。
技术总结
本发明涉及电动装载机,为解决四轮独立驱动电动装载机行走控制的问题,本发明构造一种电动装载机行走控制方法、控制装置和装载机,其中控制方法步骤为检测油门踏板深度,依据油门踏板深度确定装载机驱动总扭矩,并按驱动总扭矩分配各轮驱动扭矩;检测前后四轮驱动电机转速并推定各轮是否打滑,打滑轮所在前轮或后轮中两轮的驱动扭矩分配值在对应轮当前驱动扭矩分配值基础上按比例逐渐减小至打滑轮不打滑,在维持预定时间后将各轮驱动扭矩分配值恢复至减小之前的值;依据各轮驱动扭矩分配值对各轮的驱动电机进行控制。本发明在电动装载机驱动轮打滑时在对前后轮驱动扭矩进行调节的同时结合对工作装置的自动控制,减少打滑,提高电动轮驱动效率。
技术研发人员:罗剑伟,韦慧铃,陶林裕,蔡登胜
受保护的技术使用者:广西柳工机械股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!