动臂锁定装置及作业机械的制作方法
本发明涉及工程机械,尤其涉及一种动臂锁定装置及作业机械。
背景技术:
1、挖掘装载机俗称两头忙,是一种同时包括装载端工作装置和挖掘端工作装置的多功能工程机械设备,在装载端工作装置需要工作时,需要通过锁定装置来锁定挖掘端工作装置。挖掘端工作装置的锁定装置主要包括设置于偏转平台和挖掘端动臂上的限位挂钩,将偏转平台上的限位挂钩直接连接软轴,软轴延伸至驾驶室,驾驶员在驾驶室拉动软轴,可以带动偏转平台上的限位挂钩转动,从而锁定或者解锁挖掘端动臂上的限位挂钩。
2、现有技术中,偏转平台上的限位挂钩自身的锁紧力较小,在挖掘装载机颠簸时,偏转平台上的限位挂钩因意外转动容易与挖掘端动臂上的限位挂钩相脱离,从而失去对挖掘端动臂的限位作用。
3、因此,如何解决现有技术中的动臂锁定装置容易因颠簸、振动而失效的问题,成为本领域技术人员所要解决的重要技术问题。
技术实现思路
1、本发明提供一种动臂锁定装置及作业机械,用以解决现有技术中的动臂锁定装置容易因颠簸、振动而失效的缺陷。
2、本发明提供一种动臂锁定装置,包括:
3、第一限位钩和第二限位钩,所述第一限位钩固定设置于动臂,所述第二限位钩可定轴转动地设置于偏转平台,所述第二限位钩能够与所述第一限位钩相卡接或者脱离卡接;
4、第一软轴,连接于所述第二限位钩,所述第一软轴适于控制所述第二限位钩的转动;
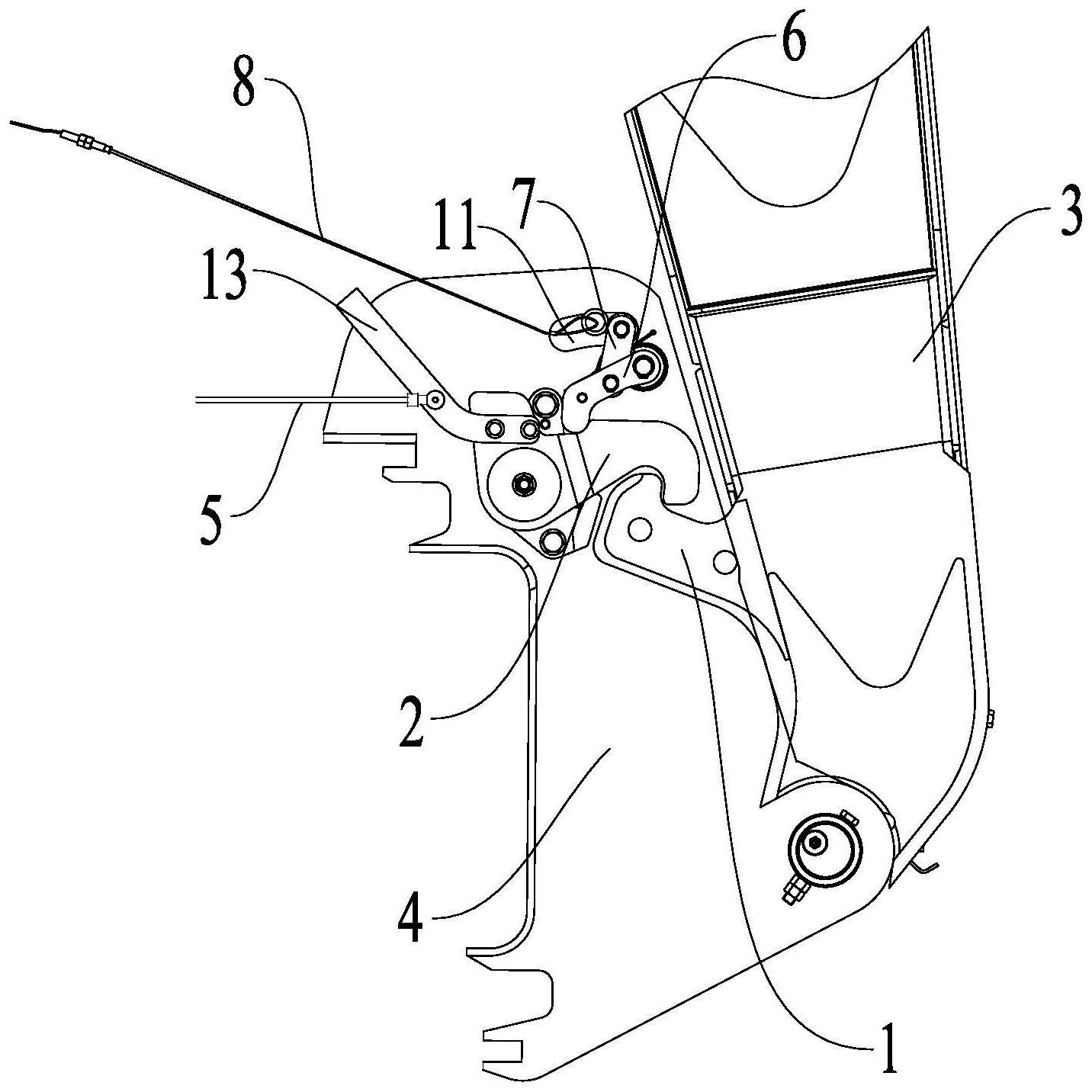
5、锁紧机构,设置于所述偏转平台上,所述锁紧机构能够在锁紧状态与解锁状态之间切换,在所述锁紧状态,所述锁紧机构压紧所述第二限位钩,以使所述第二限位钩保持在与所述第一限位钩相卡接的位置,在所述解锁状态,所述锁紧机构脱离所述第二限位钩,以允许所述第二限位钩转动。
6、根据本发明提供的一种动臂锁定装置,所述锁紧机构包括:
7、抵挡件,第一端与所述偏转平台转动连接,所述抵挡件的第二端适于抵在所述第二限位钩的上表面;
8、锁止件,第一端与所述抵挡件转动连接,所述锁止件与所述抵挡件的转动连接点位于所述抵挡件的第一端与所述抵挡件的第二端之间,所述锁止件的第二端与所述偏转平台滑动连接,以带动所述抵挡件转动;
9、驱动件,适于驱动所述锁止件的第二端相对于所述偏转平台往复滑动。
10、根据本发明提供的一种动臂锁定装置,所述驱动件包括:
11、第二软轴,第一端连接于所述锁止件的第二端,所述第二软轴的第二端延伸至驾驶室。
12、根据本发明提供的一种动臂锁定装置,所述抵挡件抵在所述第二限位钩时,所述抵挡件的位置为第一位置,所述锁止件使所述抵挡件位于所述第一位置时,所述锁止件的位置为第三位置;
13、所述锁紧机构还包括:
14、第一弹性件,设置于所述抵挡件与所述偏转平台之间,所述第一弹性件适于使所述抵挡件具有向所述第一位置转动的趋势;
15、第二弹性件,设置于所述锁止件与所述抵挡件之间,所述第二弹性件适于使所述锁止件具有向所述第三位置运动的趋势。
16、根据本发明提供的一种动臂锁定装置,所述锁止件的第二端与所述偏转平台之间设置有导向结构,所述导向结构适于对所述锁止件的第二端的滑动导向。
17、根据本发明提供的一种动臂锁定装置,所述导向结构包括:
18、导向槽,设置于所述偏转平台;
19、导向柱,设置于所述锁止件的第二端,所述导向柱嵌置于所述导向槽内,且所述导向柱能够沿所述导向槽往复滑动。
20、根据本发明提供的一种动臂锁定装置,所述导向柱呈圆柱体状,所述导向柱与所述锁止件转动连接,转动轴线与所述导向柱的中心轴线重合,且垂直于所述导向槽和所述锁止件。
21、根据本发明提供的一种动臂锁定装置,还包括:
22、限位组件,设置于所述偏转平台,所述限位组件适于使所述第二限位钩在目标角度范围内转动。
23、根据本发明提供的一种动臂锁定装置,所述锁止件的第二端设置有拉环,所述第二软轴的第一端连接于所述拉环。
24、本发明还提供一种作业机械,包括上述的动臂锁定装置。
25、本发明提供的动臂锁定装置,包括第一限位钩、第二限位钩、第一软轴和锁紧机构,第一限位钩固定设置于动臂,第二限位钩可定轴转动地设置于偏转平台,第二限位钩的转动能够与第一限位钩相卡接或者脱离卡接。第一软轴连接于第二限位钩,第一软轴用于控制第二限位钩的转动,通过第一软轴可以控制第二限位钩与第一限位钩相卡接或者脱离卡接。锁紧机构设置于偏转平台,锁紧机构能够在锁紧状态与解锁状态之间切换,当锁紧机构切换至解锁状态时,锁紧机构脱离第二限位钩,此时,锁紧机构能够允许第二限位钩转动,以使第二限位钩与第一限位钩相卡接或者脱离卡接。当锁紧机构切换至锁紧状态时,锁紧机构压紧第二限位钩,以使第二限位钩保持在与第一限位钩相卡接的位置,限制第二限位钩向与第一限位钩脱离卡接的位置转动,从而可以避免因颠簸、振动导致的第二限位钩与第一限位钩脱离卡接的问题,避免了动臂锁定装置因颠簸、振动而失效的问题。
26、此外,锁紧机构设置为通过第二软轴驱动锁止件和抵挡件运动的结构形式,具有方便操作、结构简单、成本低的优点。
27、第一弹性件和第二弹性件的设置,能够使在释放第二软轴时,使抵挡件与锁止件分别自动回复至第一位置和第三位置,并且能够增加对第二限位钩的抵紧力,确保锁紧机构的稳定性与可靠性。
28、导向结构的设置,可以使锁止件的第二端的滑动轨迹确定,有利于提高锁紧机构的稳定性。并且,将导向结构的导向柱设置为可转动的结构形式,可以减少对导向柱与导向槽的磨损。
29、进一步,在本发明提供的作业机械中,由于具备如上所述的动臂锁定装置,因此同样具备如上所述的各种优势。
技术特征:
1.一种动臂锁定装置,其特征在于,包括:
2.根据权利要求1所述的动臂锁定装置,其特征在于,所述锁紧机构包括:
3.根据权利要求2所述的动臂锁定装置,其特征在于,所述驱动件包括:
4.根据权利要求3所述的动臂锁定装置,其特征在于,所述抵挡件抵在所述第二限位钩时,所述抵挡件的位置为第一位置,所述锁止件使所述抵挡件位于所述第一位置时,所述锁止件的位置为第三位置;
5.根据权利要求3所述的动臂锁定装置,其特征在于,所述锁止件的第二端与所述偏转平台之间设置有导向结构,所述导向结构适于对所述锁止件的第二端的滑动导向。
6.根据权利要求5所述的动臂锁定装置,其特征在于,所述导向结构包括:
7.根据权利要求6所述的动臂锁定装置,其特征在于,所述导向柱呈圆柱体状,所述导向柱与所述锁止件转动连接,转动轴线与所述导向柱的中心轴线重合,且垂直于所述导向槽和所述锁止件。
8.根据权利要求1所述的动臂锁定装置,其特征在于,还包括:
9.根据权利要求3所述的动臂锁定装置,其特征在于,所述锁止件的第二端设置有拉环,所述第二软轴的第一端连接于所述拉环。
10.一种作业机械,其特征在于,包括如权利要求1至9任一项所述的动臂锁定装置。
技术总结
本发明涉及工程机械技术领域,提供一种动臂锁定装置及作业机械,其中,动臂锁定装置包括第一限位钩、第二限位钩、第一软轴和锁紧机构,第一限位钩固设于动臂,第二限位钩可定轴转动地设于偏转平台,第二限位钩能够与第一限位钩相卡接或者脱离卡接;第一软轴连接于第二限位钩,第一软轴控制第二限位钩的转动;锁紧机构设于偏转平台上,锁紧机构能够在锁紧状态与解锁状态之间切换,在锁紧状态,锁紧机构压紧第二限位钩、以使第二限位钩保持在与第一限位钩相卡接的位置,在解锁状态,锁紧机构脱离第二限位钩,以允许第二限位钩转动。如此设置,解决了现有技术中的动臂锁定装置容易因颠簸、振动而失效的问题。
技术研发人员:蔡荣跃,卢志坤,严冬冬
受保护的技术使用者:三一重机有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!