一种伸缩加压式抓斗的制作方法
本技术涉及挖掘机器领域,尤其是涉及一种伸缩加压式抓斗。
背景技术:
1、现有的液压连续抓斗设备是由主机和斗体组成。其通过主机液压站,液压卷扬机通过钢丝绳将斗体牵引至抓取面,然后靠抓斗自身的重量进行加压挖掘抓取,再通过卷扬机牵引钢丝绳带动斗体移出槽内,并将斗体的抓斗内的抓取物从开斗倒至出规定位置。
2、现有的液压式抓斗采用牵引钢丝绳所存的问题是,其在工作过程中由于抓斗的晃动而会产生不平衡的情况,而抓斗的晃动不仅会对工作效率造成影响, 而且因为抓斗本身的重量较大,其潜在的危险系数增加。
技术实现思路
1、针对现有技术的不足,本实用新型提供一种伸缩加压式抓斗,能够有效解决上述传统液压抓斗存在的问题。
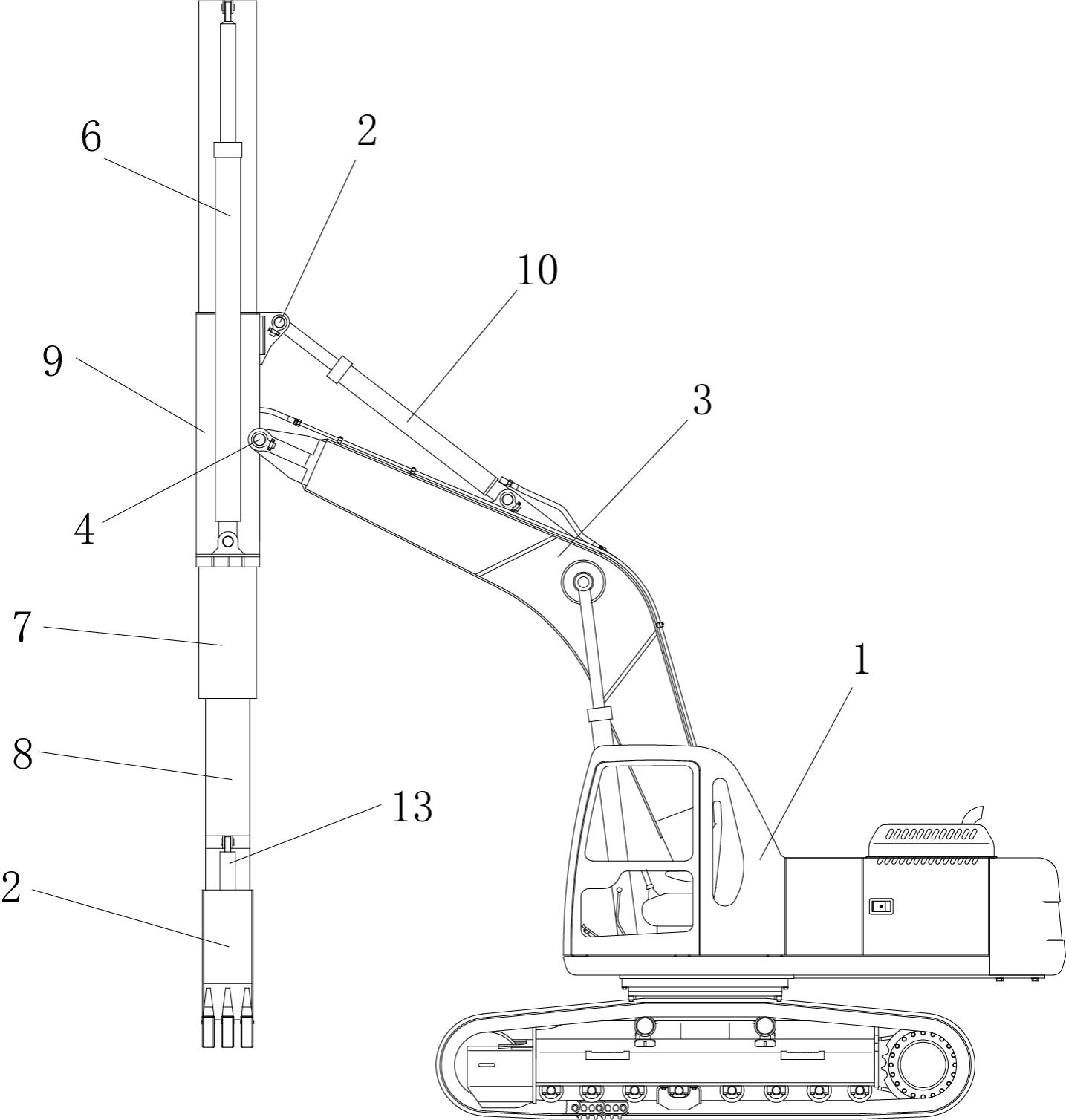
2、本实用新型解决其技术问题所采用的技术方案是:一种伸缩加压式抓斗,包括主机体、抓斗,所述主机体上安装有伸缩机构和纠偏机构,所述抓斗安装在所述伸缩机构端部,通过所述伸缩机构控制所述抓斗的竖直位置,通过所述纠偏机构控制所述伸缩机构与所述主机体形成的角度。
3、上述技术方案中,进一步地,所述主机体上安装有主机臂,所述伸缩机构转动设置在所述主机臂上,形成第一铰接点,所述纠偏机构一端固定在所述主机臂中部,另一端转动设置在所述伸缩机构上,形成第二铰接点,且所述第二铰接点设置在所述第一铰接点上方。
4、上述技术方案中,进一步地,所述伸缩机构包括伸缩加压油缸及设置在所述伸缩加压油缸上的伸缩臂,所述伸缩臂包括伸缩一臂和伸缩二臂,所述伸缩一臂设置在所述伸缩加压油缸上,所述伸缩二臂设置在所述伸缩一臂上,所述抓斗设置在所述伸缩二臂上。
5、上述技术方案中,进一步地,所述伸缩加压油缸上还设置有用于导向的伸缩臂导向装置。
6、上述技术方案中,进一步地,所述纠偏机构为纠偏油缸,控制所述纠偏油缸伸缩来改变所述第二铰接点的位置,从而控制所述伸缩机构的偏转角度。
7、上述技术方案中,进一步地,所述抓斗包括相对称的左抓斗和右抓斗,所述左抓斗和右抓斗上均设置有第三铰接点第四铰接点,所述伸缩二臂上设置有两组抓斗伸缩臂,所述抓斗伸缩臂的两端分别转动设置在所述伸缩二臂和第三铰接点处,所述第四铰接点位于所述伸缩二臂上且为固定位置,所述第三铰接点位于所述第四铰接点的外侧。
8、上述技术方案中,进一步地,所述抓斗与所述伸缩二臂采用可拆式的法兰连接。
9、本实用新型的有益效果是:采用直接平衡式的加压抓取,能够大大减少抓斗在工作过程中产生晃动的情况,消除潜在危险,保证抓斗的工作效率;较之于现有技术,前部运行的抓斗体重量的大幅度减少,有效地节能降耗。
技术特征:
1.一种伸缩加压式抓斗,包括主机体、抓斗,其特征在于,所述主机体上安装有伸缩机构和纠偏机构,所述抓斗安装在所述伸缩机构端部,通过所述伸缩机构控制所述抓斗的竖直位置,通过所述纠偏机构控制所述伸缩机构与所述主机体形成的角度。
2.根据权利要求1所述的一种伸缩加压式抓斗,其特征在于,所述主机体上安装有主机臂,所述伸缩机构转动设置在所述主机臂上,形成第一铰接点,所述纠偏机构一端固定在所述主机臂中部,另一端转动设置在所述伸缩机构上,形成第二铰接点,且所述第二铰接点设置在所述第一铰接点上方。
3.根据权利要求1所述的一种伸缩加压式抓斗,其特征在于,所述伸缩机构包括伸缩加压油缸及设置在所述伸缩加压油缸上的伸缩臂,所述伸缩臂包括伸缩一臂和伸缩二臂,所述伸缩一臂设置在所述伸缩加压油缸上,所述伸缩二臂设置在所述伸缩一臂上,所述抓斗设置在所述伸缩二臂上。
4.根据权利要求3所述的一种伸缩加压式抓斗,其特征在于,所述伸缩加压油缸上还设置有用于导向的伸缩臂导向装置。
5.根据权利要求2所述的一种伸缩加压式抓斗,其特征在于,所述纠偏机构为纠偏油缸,控制所述纠偏油缸伸缩来改变所述第二铰接点的位置,从而控制所述伸缩机构的偏转角度。
6.根据权利要求3所述的一种伸缩加压式抓斗,其特征在于,所述抓斗包括相对称的左抓斗和右抓斗,所述左抓斗和右抓斗上均设置有第三铰接点第四铰接点,所述伸缩二臂上设置有两组抓斗伸缩臂,所述抓斗伸缩臂的两端分别转动设置在所述伸缩二臂和第三铰接点处,所述第四铰接点位于所述伸缩二臂上且为固定位置,所述第三铰接点位于所述第四铰接点的外侧。
7.根据权利要求3所述的一种伸缩加压式抓斗,其特征在于,所述抓斗与所述伸缩二臂采用可拆式的法兰连接。
技术总结
本技术公开了一种伸缩加压式抓斗,包括主机体、抓斗,所述主机体上安装有伸缩机构和纠偏机构,所述抓斗安装在所述伸缩机构端部,通过所述伸缩机构控制所述抓斗的水平位置,通过所述纠偏机构控制所述伸缩机构与所述主机体形成的角度。采用直接平衡式的加压抓取,能够大大减少抓斗在工作过程中产生晃动的情况,消除潜在危险,保证抓斗的工作效率。
技术研发人员:罗宏钢,刘德山,钭露坚
受保护的技术使用者:金华市信宏施工设备服务有限公司
技术研发日:20230126
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!