一种垂直直吸式清淤机器人及清淤系统的制作方法
本技术涉及清淤,具体而言,涉及一种垂直直吸式清淤机器人及清淤系统。
背景技术:
1、污水池清淤作业属于有限空间作业,有限空间作业事故多发,具有较大的风险性,同时对进行清淤作业时,由于工作面狭窄,环境潮湿等因素影响,污水池清淤作业面对的风险性极高。
2、污水池中淤泥聚积产生的大量有毒有害,易燃易爆气体,散发出臭味,随意施工可能造成中毒、爆炸等事故,造成人员伤亡。污水池存在积水,潮湿环境下照明设备等临时用电设施在高电压下可能发生漏电,导致触电事故的发生。事故发生后由于污水池工作面狭窄,难以第一时间察觉,同时施救难度大,难以在短时间内对受害人员提供及时有效的救援,造成不可挽回的损失。
3、以机械化代替人工进行清淤作业,是技术革新下的一个大趋势,机器人进入污水池作业可以有效的保障人的生命财产安全,同时机器人工作效率高,并可以保持长时间的高强度作业,降低安全管理的难度,安全风险大大降低。目前水下清淤机器人行走机构一般采用履带,结构复杂,而且无法实现水下悬浮和水面行走等,只能在水底进行清淤作业;而且由于机器人对周围环境的监测能力较弱,使得操作人员在清淤时对机器人周围环境的信息收集不全面,容易出现盲区从而引起事故。
4、如公开号为cn109577400a的发明专利申请公开了一种履带底盘搅吸式清淤机器人,能够实现水下无害化移动快速清淤。但是其采用履带底盘,无法实现清淤机器人的水下悬浮以及水面行走,只能在水底进行清淤作业,而且离心式渣浆泵也易堵甚至会堵死叶轮打坏联轴器,水下无法更换备件;机器人无自动导航系统,清淤过程中此机器人配备的视觉系统由于水的浊度太高而根本无法使用,纯靠岸边人工感觉或经验操作机器人动作,不准确也不安全。
5、再如公告号为cn214784640u的实用新型专利公开了一种城市深层污水传输隧道检测与清淤机器人,包括隧道结构检测装置、清淤作业装置、机器人水中定位装置、机器人水中行走装置和机器人通讯控制装置;隧道结构检测装置包括浑水摄像机和声呐;清淤作业装置包括搭载于机器人本体前部的淤泥铲;机器人水中定位装置包括陀螺仪;机器人通讯控制装置包括水下线缆及控制器,控制器通过水下线缆与地面控制平台连接。其同样采用履带底盘,无法实现清淤机器人的水下悬浮以及水面行走,只能在水底进行清淤作业。
技术实现思路
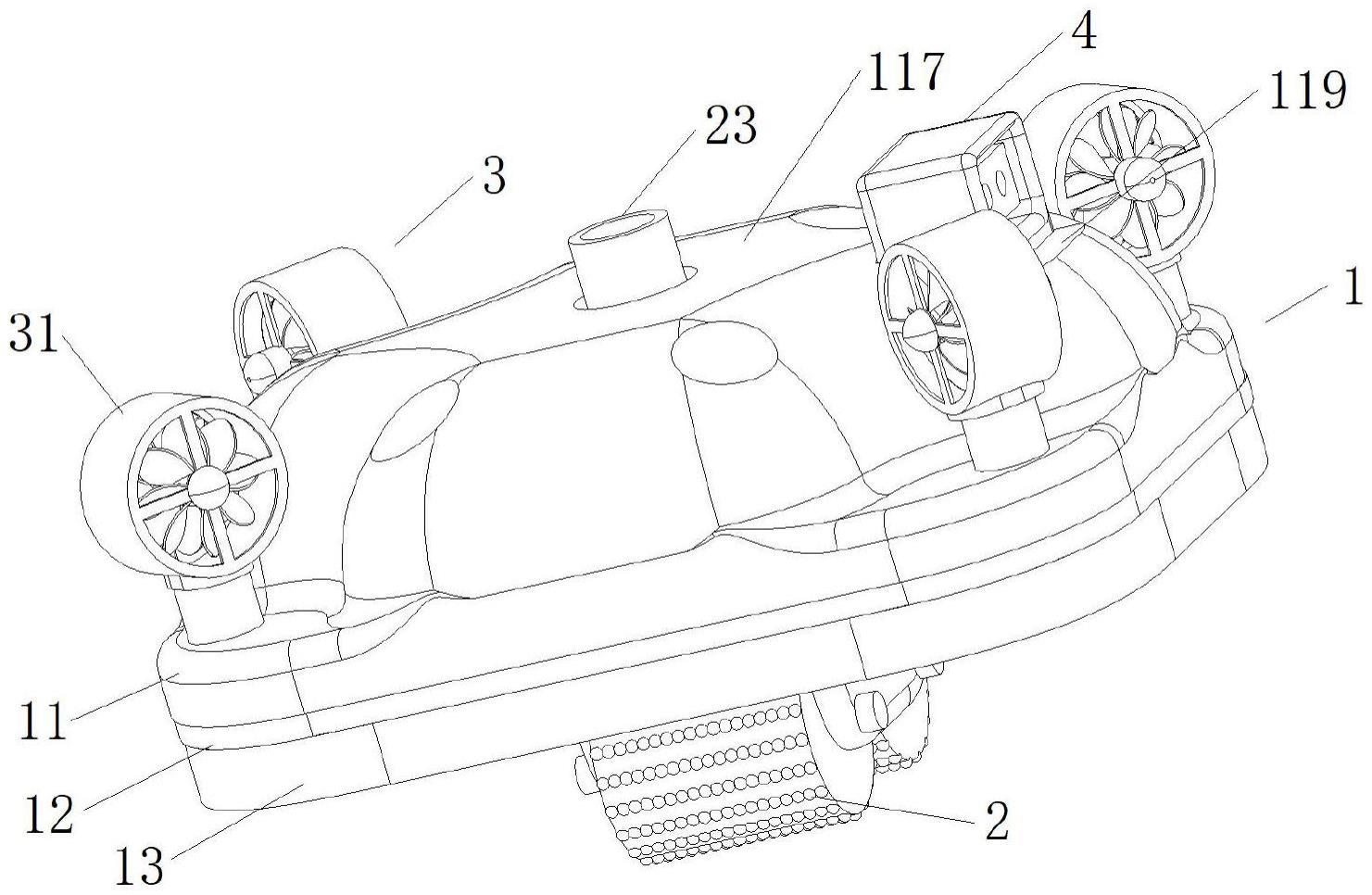
1、为克服现有技术中清淤机器人存在的结构复杂,无法实现水下悬浮和水面行走,只能在水底进行清淤作业;对周围环境的监测能力较弱,容易出现盲区从而引起事故等问题,本实用新型提供了一种垂直直吸式清淤机器人,包括框架式滑靴结构、吸泥机构和推进机构,所述吸泥机构安装在所述框架式滑靴结构中间位置;所述推进机构为矢量推进器,所述矢量推进器包括平移矢量推进器和升降矢量推进器,三个以上所述平移矢量推进器分布在所述框架式滑靴结构上表面外沿位置处,两个以上所述升降矢量推进器安装在所述框架式滑靴结构上表面。
2、采用箱式浮力体和滑靴组成的框架式滑靴结构作为清淤机器人的主体框架,并将吸泥机构安装在框架式滑靴结构中间位置,淤泥从框架式滑靴结构底部中间被吸走,吸泥行程短,效率高,吸泥过程相对稳定,可避免清淤机器人在吸泥过程中发生倾斜而影响其正常作业。
3、优选地,还包括驱动机构、动力源和监控机构,所述框架式滑靴结构包括上下设置的箱式浮力体和滑靴,所述箱式浮力体中间上凹且外边沿固定安装在所述滑靴上表面,所述箱式浮力体中间下表面与所述滑靴上表面之间形成有第一容置空间,所述驱动机构和所述动力源设置于所述第一容置空间内,所述监控机构安装在所述箱式浮力体上。
4、优选地,所述动力源输出端与所述驱动机构、所述监控机构输入端相连,所述驱动机构输出端与所述推进机构相连。
5、优选地,所述滑靴为板状,其中间形成有第一吸泥管安装孔,所述箱式浮力体上所述第一吸泥管安装孔正上方位置处形成有第二吸泥管安装孔;所述吸泥机构安装在所述第一吸泥管安装孔和所述第二吸泥管安装孔上。
6、优选地,所述吸泥机构包括吸泥辊、辊轮安装座和吸泥管道,所述吸泥辊两端通过所述辊轮安装座安装在所述滑靴下表面上,所述吸泥管道入口位于所述吸泥辊上表面附近,且所述吸泥管道穿过所述滑靴、所述第一容置空间,从所述箱式浮力体上表面引出。
7、优选地,所述滑靴外沿向下延伸有一段护板。
8、优选地,所述滑靴为长方形板状结构,四个所述平移矢量推进器均匀分布在所述长方形板状结构四角,且四个所述平移矢量推进器推进方向所在直线相交形成平行四边形。
9、优选地,所述框架式滑靴结构后端、左右两侧上均安装有平移矢量推进器;安装在后端的所述平移矢量推进器向前方向推进;位于左右两侧的所述平移矢量推进器向左右两侧推进,或向左前右前方向推进。
10、优选地,所述滑靴上形成有两个以上第一升降推进器安装孔,所述箱式浮力体上位于所述第一升降推进器安装孔正上方位置处形成有与所述第一升降推进器安装孔相对应的第二升降推进器安装孔;所述第二升降推进器安装孔边沿向与其对应的所述第一升降推进器安装孔方向延伸形成有升降推进器安装筒,所述升降矢量推进器安装在所述升降推进器安装筒内。
11、本实用新型提供了一种清淤系统,其特征在于,包括上述垂直直吸式清淤机器人。
12、有益效果:
13、采用本实用新型技术方案产生的有益效果如下:采用箱式浮力体和滑靴组成的框架式滑靴结构作为清淤机器人的主体框架,并将吸泥机构安装在框架式滑靴结构中间位置,淤泥从框架式滑靴结构底部中间被吸走,吸泥行程短,效率高,吸泥过程相对稳定,可避免清淤机器人在吸泥过程中发生倾斜而影响其正常作业。
技术特征:
1.一种垂直直吸式清淤机器人,其特征在于,包括框架式滑靴结构、吸泥机构、推进机构、驱动机构、动力源和监控机构,所述吸泥机构安装在所述框架式滑靴结构中间位置;所述推进机构为矢量推进器,所述矢量推进器包括平移矢量推进器和升降矢量推进器,三个以上所述平移矢量推进器分布在所述框架式滑靴结构上表面外沿位置处,两个以上所述升降矢量推进器安装在所述框架式滑靴结构上表面;
2.根据权利要求1所述的一种垂直直吸式清淤机器人,其特征在于,所述动力源输出端与所述驱动机构、所述监控机构输入端相连,所述驱动机构输出端与所述推进机构相连。
3.根据权利要求1所述的一种垂直直吸式清淤机器人,其特征在于,所述滑靴为板状,其中间形成有第一吸泥管安装孔,所述箱式浮力体上所述第一吸泥管安装孔正上方位置处形成有第二吸泥管安装孔;所述吸泥机构安装在所述第一吸泥管安装孔和所述第二吸泥管安装孔上。
4.根据权利要求3所述的一种垂直直吸式清淤机器人,其特征在于,所述吸泥机构包括吸泥辊、辊轮安装座和吸泥管道,所述吸泥辊两端通过所述辊轮安装座安装在所述滑靴下表面上,所述吸泥管道入口位于所述吸泥辊上表面附近,且所述吸泥管道穿过所述滑靴、所述第一容置空间,从所述箱式浮力体上表面引出。
5.根据权利要求4所述的一种垂直直吸式清淤机器人,其特征在于,所述滑靴外沿向下延伸有一段护板。
6.根据权利要求1所述的一种垂直直吸式清淤机器人,其特征在于,所述滑靴为长方形板状结构,四个所述平移矢量推进器均匀分布在所述长方形板状结构四角,且四个所述平移矢量推进器推进方向所在直线相交形成平行四边形。
7.根据权利要求1所述的一种垂直直吸式清淤机器人,其特征在于,所述框架式滑靴结构后端、左右两侧上均安装有平移矢量推进器;安装在后端的所述平移矢量推进器向前方向推进;位于左右两侧的所述平移矢量推进器向左右两侧推进,或向左前右前方向推进。
8.根据权利要求1所述的一种垂直直吸式清淤机器人,其特征在于,所述滑靴上形成有两个以上第一升降推进器安装孔,所述箱式浮力体上位于所述第一升降推进器安装孔正上方位置处形成有与所述第一升降推进器安装孔相对应的第二升降推进器安装孔;所述第二升降推进器安装孔边沿向与其对应的所述第一升降推进器安装孔方向延伸形成有升降推进器安装筒,所述升降矢量推进器安装在所述升降推进器安装筒内。
9.一种清淤系统,其特征在于,包括如权利要求1-8任一项所述垂直直吸式清淤机器人。
技术总结
本技术公开了一种垂直直吸式清淤机器人及清淤系统,属于清淤技术领域,包括框架式滑靴结构、吸泥机构和推进机构,吸泥机构安装在框架式滑靴结构中间位置;三个以上平移矢量推进器分布在框架式滑靴结构上表面外沿位置处,两个以上升降矢量推进器安装在框架式滑靴结构上表面。本技术采用箱式浮力体和滑靴组成的框架式滑靴结构作为清淤机器人的主体框架,并将吸泥机构安装在框架式滑靴结构中间位置,淤泥从框架式滑靴结构底部中间被吸走,吸泥行程短,效率高,吸泥过程相对稳定,可避免清淤机器人在吸泥过程中发生倾斜而影响其正常作业。
技术研发人员:匡科,张红要,常颖,李子逵,孙伟,蔡芸,毕宇清,赖蕾颖,陈业勤,陈燕
受保护的技术使用者:广州市净水有限公司
技术研发日:20230310
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!