一种雨水管道清淤机器人的制作方法
本发明涉及雨水管道清理,尤其涉及一种雨水管道清淤机器人。
背景技术:
1、雨水管道是城市排水系统中非常重要的环节,雨水管道由于其管径相对来说较小,其内部容易淤积泥沙、建筑垃圾、植物残骸等,加上地表树木根部容易伸入管道,管道堵塞的情况极易发生,而管道内淤积泥沙会减少排水面积,加上树根盘绕阻挡固体垃圾,最后会在管道内部形成极难清理的障碍物,从而严重影响管道的排水功能。
2、经检索,中国专利号为cn 108413177 b的发明专利,公开了一种自适应管道清淤机器人,包括壳体、铰刀清淤机构、摄像头和多个行走装置,铰刀清淤机构设置在壳体上,摄像头设置在壳体上,行走装置包括变径机构、行走机构和感压模块,变径机构设置在壳体上,行走机构设置在变径机构的输出端,感压模块与升降式变径机构相匹配。与现有技术相比,该中国专利号为cn 108413177 b的发明专利能够实时采集管道内部图像,便于工作人员了解机器人所处环境;能够适应不同的管径,使得机器人始终稳定在最有效的工作状态。
3、但上述雨水管道清淤机器人在实际清淤的过程中,清淤铰刀只能对淤泥进行打散处理,清淤机构单一无法将从管道内打散的淤泥排出,从而无法有效地对雨水管道进行清淤,因此需要一种能够有效地对雨水管道进行清淤的雨水管道清淤机器人。
技术实现思路
1、本发明的目的是为了解决现有技术中存在清淤机构单一无法将从管道内打散的淤泥排出,从而无法有效地对雨水管道进行清淤的缺点,而提出的一种雨水管道清淤机器人。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种雨水管道清淤机器人,包括机器人壳体、设置在所述机器人壳体外部的自适应行走机构以及用于控制的无线遥控显示器,所述机器人壳体的内部固定连接有密封外壳,所述密封外壳的内部设置有与所述无线遥控显示器电性连接的位置获取模块,所述机器人壳体的外部安装有与所述无线遥控显示器电性连接的水下照明摄像头、水下红外测距器和水下计米器,所述机器人壳体的内部固定连接有固定筒,所述固定筒的内部设置有用于清除淤泥的清淤组合机构,所述清淤组合机构包括固定连接在所述固定筒内部的高压水管道和固定连接在所述固定筒外部的吸污管道,所述高压水管道的一端外部固定连接有限位密封圈a和限位密封圈b,所述限位密封圈a和所述限位密封圈b之间转动连接有转动管,所述转动管的外部设置有延伸至所述机器人壳体外部的组合组件,所述高压水管道的另一端延伸至所述机器人壳体的外部,所述吸污管道的一端外部固定连接有固定刀片网圈,所述吸污管道的另一端延伸至所述机器人壳体的外部。
4、上述技术方案进一步包括:
5、所述转动管位于所述高压水管道的外部,所述转动管的外径大于所述限位密封圈a和所述限位密封圈b的外径;所述转动管的两端面要尽可能地与所述限位密封圈a和所述限位密封圈b之间的端面贴合。
6、所述组合组件包括固定连接在所述机器人壳体外部的轴承和固定连接在所述轴承内环的连接管,所述连接管的一端延伸至所述机器人壳体的内部并固定连接在所述转动管的外部,所述连接管的另一端固定连通有两个喷水管,两个所述喷水管的外部均开设有喷水孔组,两组所述喷水孔组呈轴对称分布;当高压水流通过所述高压水管道、所述转动管进入两个所述喷水管的内部时,高压水流会通过轴对称的两组所述喷水孔组喷出并对两个所述喷水管产生反作用力,从而辅助两个所述喷水管带动所述转动管进行转动。
7、所述连接管的内部固定连接有安装架,所述安装架的外部固定连接有位于所述高压水管道端部的水驱动扇叶,所述连接管和两个所述喷水管的外部均固定连接有碎淤铰刀;高压水流通过所述高压水管道进入所述转动管的内部时,高压水流会驱动所述水驱动扇叶进行转动,使得所述水驱动扇叶带动所述转动管和两个所述喷水管进行转动,所述碎淤铰刀跟随转动能够对结块的淤泥进行破碎。
8、所述机器人壳体的外部设置有用于防止所述吸污管道堵塞的辅助机构,所述辅助机构包括固定连接在所述机器人壳体外部的两个连接凸耳,两个所述连接凸耳之间转动连接有转轴,所述转轴的中部固定连接有与所述固定刀片网圈相适配的转动刀片网圈,所述转动刀片网圈与两个所述连接凸耳之间均固定连接有套设在所述转轴外部的防锈扭簧;所述转动刀片网圈转动至与所述固定刀片网圈相贴合时,能够将所述固定刀片网圈外部拦截的杂物进行切断,避免所述固定刀片网圈堵塞影响淤泥进入所述吸污管道的内部。
9、所述辅助机构还包括开设在所述机器人壳体外侧的嵌入槽a,所述嵌入槽a的内部设置有电磁铁块,所述转动刀片网圈的外部固定连接有可与所述电磁铁块相吸附的磁铁块;所述电磁铁块与所述磁铁块相吸附时,所述转动刀片网圈即可与所述固定刀片网圈转动贴合对杂物进行切断。
10、所述机器人壳体的内部设置有用于控制所述电磁铁块通断电的控制机构,所述控制机构包括开设在所述机器人壳体内侧的嵌入槽b和嵌固在所述机器人壳体内部的控制模块,所述嵌入槽b的内部设置有用于控制所述电磁铁块通断电的密封性弹性开关,所述密封性弹性开关与所述控制模块电性连接;所述密封性弹性开关被按下时,所述控制模块就会控制所述电磁铁块通电对所述磁铁块进行吸附。
11、所述控制机构还包括固定连接在所述连接管外部的驱动齿轮、转动连接在所述机器人壳体内部的啮合齿轮和内齿圈,所述驱动齿轮与所述啮合齿轮、所述内齿圈相啮合,所述内齿圈的外部固定连接有连接柱,所述连接柱的端部固定连接有弹性销,所述弹性销靠近所述机器人壳体内侧的一端呈圆弧状;所述连接管带动所述驱动齿轮进行转动时,所述驱动齿轮进行转动会通过所述啮合齿轮带动所述内齿圈进行转动,所述内齿圈转动会带动所述弹性销对所述密封性弹性开关进行按压。
12、本发明具备以下有益效果:
13、1、本发明通过无线遥控显示器使得自适应行走机构能够带动机器人在不同管径的雨水管道中行走,通过位置获取模块的可知此时机器人的所在位置,通过水下照明摄像头和水下红外测距器的设置可知此时机器人前方的管道路况,通过水下计米器的设置可知机器人的行进距离,以便于实时观测机器人的工作状态。
14、2、本发明通过启动高压水管道端部的高压水泵和吸污管道的吸污泵,高压水泵启动能够对雨水管道内部的淤泥进行转动高压冲散,且对淤泥进行转动破碎,吸污泵启动能够使雨水管道内部被冲散破碎的淤泥通过固定刀片网圈进入吸污管道的内部进行排出,从而能够有效地对雨水管道进行清淤。
15、3、本发明通过启动高压水管道端部的高压水泵和吸污管道的吸污泵时,连接管和两个喷水管每转动一圈,电磁铁块就会通电、断电一次,转动刀片网圈就会快速与固定刀片网圈转动贴合一次,固定刀片网圈外部的杂物就会被切断一次,且被切断的杂物会跟随淤泥一起进入吸污管道的内部进行排出,从而能够防止固定刀片网圈堵塞而影响到淤泥的排出。
技术特征:
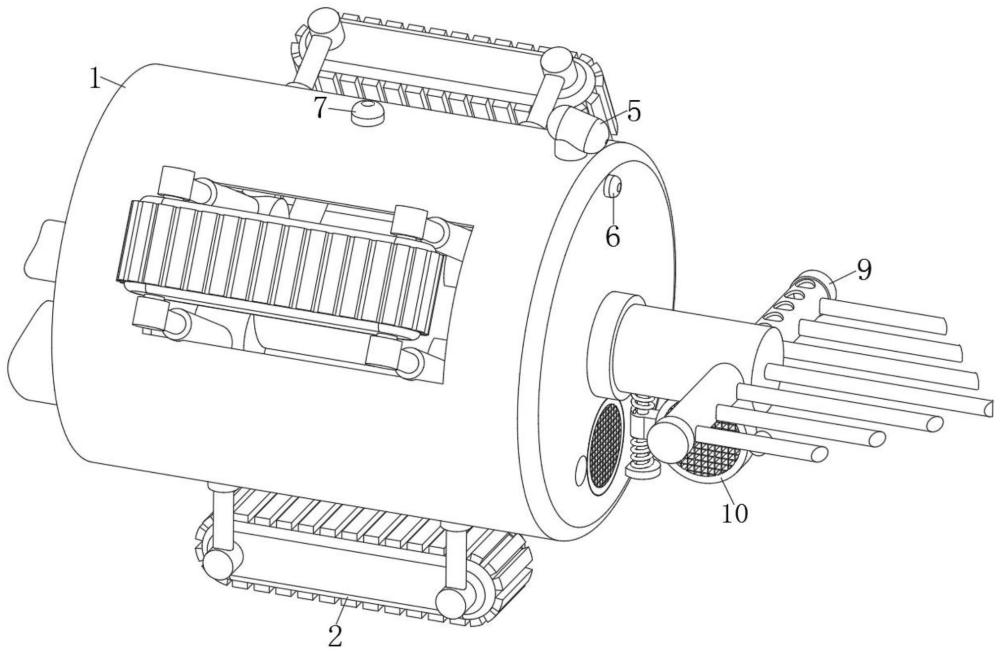
1.一种雨水管道清淤机器人,包括机器人壳体(1)、设置在所述机器人壳体(1)外部的自适应行走机构(2)以及用于控制的无线遥控显示器(3),其特征在于:所述机器人壳体(1)的内部固定连接有密封外壳(4),所述密封外壳(4)的内部设置有与所述无线遥控显示器(3)电性连接的位置获取模块,所述机器人壳体(1)的外部安装有与所述无线遥控显示器(3)电性连接的水下照明摄像头(5)、水下红外测距器(6)和水下计米器(7),所述机器人壳体(1)的内部固定连接有固定筒(8),所述固定筒(8)的内部设置有用于清除淤泥的清淤组合机构(9),所述清淤组合机构(9)包括固定连接在所述固定筒(8)内部的高压水管道(91)和固定连接在所述固定筒(8)外部的吸污管道(92),所述高压水管道(91)的一端外部固定连接有限位密封圈a(93)和限位密封圈b(94),所述限位密封圈a(93)和所述限位密封圈b(94)之间转动连接有转动管(95),所述转动管(95)的外部设置有延伸至所述机器人壳体(1)外部的组合组件(96),所述高压水管道(91)的另一端延伸至所述机器人壳体(1)的外部,所述吸污管道(92)的一端外部固定连接有固定刀片网圈(97),所述吸污管道(92)的另一端延伸至所述机器人壳体(1)的外部。
2.根据权利要求1所述的一种雨水管道清淤机器人,其特征在于:所述转动管(95)位于所述高压水管道(91)的外部,所述转动管(95)的外径大于所述限位密封圈a(93)和所述限位密封圈b(94)的外径。
3.根据权利要求1所述的一种雨水管道清淤机器人,其特征在于:所述组合组件(96)包括固定连接在所述机器人壳体(1)外部的轴承(961)和固定连接在所述轴承(961)内环的连接管(962),所述连接管(962)的一端延伸至所述机器人壳体(1)的内部并固定连接在所述转动管(95)的外部,所述连接管(961)的另一端固定连通有两个喷水管(963),两个所述喷水管(963)的外部均开设有喷水孔组(964),两组所述喷水孔组(964)呈轴对称分布。
4.根据权利要求3所述的一种雨水管道清淤机器人,其特征在于:所述连接管(962)的内部固定连接有安装架(965),所述安装架(965)的外部固定连接有位于所述高压水管道(91)端部的水驱动扇叶(966),所述连接管(962)和两个所述喷水管(963)的外部均固定连接有碎淤铰刀(967)。
5.根据权利要求1所述的一种雨水管道清淤机器人,其特征在于:所述机器人壳体(1)的外部设置有用于防止所述吸污管道(92)堵塞的辅助机构(10)所述辅助机构(10)包括固定连接在所述机器人壳体(1)外部的两个连接凸耳(101),两个所述连接凸耳(101)之间转动连接有转轴(102),所述转轴(102)的中部固定连接有与所述固定刀片网圈(97)相适配的转动刀片网圈(103),所述转动刀片网圈(103)与两个所述连接凸耳(101)之间均固定连接有套设在所述转轴(102)外部的防锈扭簧(104)。
6.根据权利要求5所述的一种雨水管道清淤机器人,其特征在于:所述辅助机构(10)还包括开设在所述机器人壳体(1)外侧的嵌入槽a(105),所述嵌入槽a(105)的内部设置有电磁铁块(106),所述转动刀片网圈(103)的外部固定连接有可与所述电磁铁块(106)相吸附的磁铁块(107)。
7.根据权利要求6所述的一种雨水管道清淤机器人,其特征在于:所述机器人壳体(1)的内部设置有用于控制所述电磁铁块(106)通断电的控制机构(11),所述控制机构(11)包括开设在所述机器人壳体(1)内侧的嵌入槽b(111)和嵌固在所述机器人壳体(1)内部的控制模块,所述嵌入槽b(111)的内部设置有用于控制所述电磁铁块(15)通断电的密封性弹性开关(112),所述密封性弹性开关(112)与所述控制模块电性连接。
8.根据权利要求7所述的一种雨水管道清淤机器人,其特征在于:所述控制机构(11)还包括固定连接在所述连接管(962)外部的驱动齿轮(113)、转动连接在所述机器人壳体(1)内部的啮合齿轮(114)和内齿圈(115),所述驱动齿轮(113)与所述啮合齿轮(114)、所述内齿圈(115)相啮合,所述内齿圈(115)的外部固定连接有连接柱(116),所述连接柱(116)的端部固定连接有弹性销(117),所述弹性销(117)靠近所述机器人壳体(1)内侧的一端呈圆弧状。
技术总结
本发明公开了一种雨水管道清淤机器人,包括机器人壳体、自适应行走机构以及无线遥控显示器,机器人壳体的内部固定连接有密封外壳,密封外壳的内部设置有位置获取模块,机器人壳体的外部安装有水下照明摄像头、水下红外测距器和水下计米器,机器人壳体的内部固定连接有固定筒,固定筒的内部设置有清淤组合机构,清淤组合机构包括高压水管道和吸污管道。本发明通过启动高压水管道端部的高压水泵和吸污管道的吸污泵,使其能够对雨水管道内部的淤泥进行转动高压冲散并对淤泥进行转动破碎,同时雨水管道内部被冲散破碎的淤泥能够通过固定刀片网圈进入吸污管道的内部进行排出,从而能够有效地对雨水管道进行清淤。
技术研发人员:蒋贵花,蒋业海,罗平平
受保护的技术使用者:长沙韵涵机电商贸有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!