自推进式建筑机器和用于控制自推进式建筑机器的方法与流程
[0001]
本发明涉及一种具有驱动装置的自推进式建筑机器、特别是滑模摊铺机,其具有左履带和右履带,并且涉及一种用于控制自推进式建筑机器、特别是滑模摊铺机的方法。
背景技术:
[0002]
已知的自推进式建筑机器的特征在于它们具有布置在机架上的作业装置,用于在地形上建造结构或用于改变地形。在已知的滑模摊铺机中,作业装置包括用于模制可流动材料、特别是混凝土的装置,其在下文中被称为混凝土槽。混凝土槽允许生产各种设计的结构,例如导向墙或交通岛。例如,滑模摊铺机在ep 1 103 659b1中描述。
[0003]
自推进式建筑机器具有:行进传动装置,特别是履带,其沿作业方向布置于机架的左侧和右侧;以及用于驱动行进传动装置的驱动装置,使得建筑机器可以在地形上进行平移和/或旋转运动。
[0004]
在自推进式建筑机器的情况下,目标是在很大程度上自动控制而无需由驾驶员进行大量干预。建筑机器的自动控制涉及驱动装置,驱动装置以这种方式被控制,使得相对于建筑机器的任意参考点在预定路径上移动。预定路径可以包括笔直部分和/或弯曲部分。
[0005]
用于控制自推进式建筑机器的已知方法需要使用导向线,通过该导向线建立路径或与路径等距。还已知使用全球导航卫星系统(gnss) 控制自推进式建筑机器。ep 2 620 547a1描述了一种使用导向线控制驱动装置的建筑机器,而ep 2336424a1描述了一种使用全球导航卫星系统(gnss)控制驱动装置的建筑机器。
[0006]
建筑机器的自动控制的问题在于,建筑机器在转弯时必须移动,使得作业装置总是处于正确的位置和正确的取向,从而例如可以在正确的取向在正确的位置建造结构。
[0007]
在作业方向上具有左侧前行进传动装置和右侧前行进传动装置以及左侧后行进传动装置和右侧后行进传动装置的自推进式建筑机器可以被转向,使得它们可在期望的取向上以足够的精确度遵循预定路径。可以建立用于控制前行进传动装置的前参考点,并且可以建立用于控制后行进传动装置的后参考点,从而可以这种方式致动前行进传动装置和后行进传动装置,使得前参考点和后参考点两者都在预定路径上移动。前行进传动装置和后行进传动装置的单独致动允许在转弯时维持建筑机器的期望的取向。
[0008]
但是,在仅具有左履带和右履带的建筑机器的情况下,限制了可转向性。因此,当控制仅具有左履带和右履带的控制建筑机器的驱动装置时,在实践中会出现以下问题:相对于建筑机器的参考点在预定路径上移动,但后参考点未遵循预定路径,控制基于该参考点,并且该参考点优选为在作业方向上的前参考点。如果建筑机器是滑模摊铺机,则滑模的后端就因此不能遵循预定路径,这意味着要建造的结构或其部分以后不处于正确的位置。
技术实现要素:
[0009]
由本发明解决的问题是提供一种自推进式建筑机器,特别是滑模摊铺机,其具有左履带和右履带,其在地形中在期望的取向上遵循预定路径。由本发明解决的另一问题是
提供一种用于控制自推进式建筑机器的方法,特别是滑模摊铺机,其具有左履带和右履带,自推进式建筑机器通过该方法在正确的取向上遵循预定路径。
[0010]
根据本发明的自推进式建筑机器,特别是滑模摊铺机,包括:机架;作业装置,其布置在机架上;在作业方向上在左侧的履带以及在作业方向上在右侧的履带;以及驱动装置,其用于以预定的链速驱动左履带以及以预定的链速驱动右履带。此外,建筑机器具有控制和运算单元,该控制和运算单元配置为,使得基于在作业方向上相对于机架的前参考点与预定路径之间的距离,预先确定左履带和/或右履带的链速,使得前参考点在预定路径上移动。
[0011]
在本文中,预定路径应理解为指可以具有笔直部分和/或弯曲部分的任何线路。参考点可以是建筑机器上(例如在机架上)的任何点,或建筑机器附近的任何点。以参考点在预定路径上或沿着预定路径移动的这种方式进行的控制,应理解为指目标在于确保参考点的当前位置与期望位置之间的偏差最小的控制,即参考点不必必须精确地位于预定路径上,在实践中这甚至是不可能的。
[0012]
前参考点理解为在作业方向上位于后参考点前面的参考点。前参考点优选地位于建筑机器的前部区域中,特别是位于前履带的一个或多个前辊的区域中,而后参考点优选地位于建筑机器的后部区域中。
[0013]
仅基于前参考点的控制意味着在建筑机器转弯时,后参考点不遵循预定路径。因此,根据本发明的建筑机器的控制和运算单元配置为使得在转弯期间,基于在作业方向上相对于机架的后参考点与预定路径之间的距离,对控制进行校正,使得在作业方向上相对于机架的后参考点与预定路径之间的距离减小。结果,检测到后参考点与预定路径的偏差。可以通过目标转向运动对控制进行校正,该目标转向运动尽管允许前参考点偏离预定路径,但仍允许后参考点沿预定路径的方向移动,使得相对于后参考点与预定路径的距离减小。采用后参考点与预定路径的最小可能偏差对于最佳作业结果起决定性作用。
[0014]
根据本发明的建筑机器的优选实施例,控制和运算单元配置为,使得在建筑机器转弯期间,采用校正路径,用于基于在作业方向上相对于机架的前参考点与预定路径之间的距离的建筑机器的控制。因此,控制是基于校正路径作为所述预定路径的。校正路径与原始预定路径相距预定距离地延伸,该预定距离取决于在作业方向上相对于机架的后参考点与原始预定路径之间的距离。为了使后参考点在原始预定路径的方向上移动,后参考点与原始预定路径之间的较大距离导致比较小距离更大的校正。
[0015]
可以通过指定校正目标值(即位于校正路径上的点)针对提供的控制进行校正,将该目标值与实际值(即前参考点的当前位置)比较,以便确定控制偏差,即前参考点和校正路径之间的距离。
[0016]
可以为控制确定合适的校正函数。校正路径与预定路径之间的距离可以是在作业方向上相对于机架的后参考点与预定路径之间的距离,其以校正因子计算。例如,可以为校正指定合适的偏移。
[0017]
转向校正取决于建筑机器是左侧弯道还是右侧弯道行驶。在转弯期间,采用校正路径,用于基于在作业方向上相对于机架的前参考点与预定路径之间的距离的建筑机器的控制,校正路径在预定路径的弯道内侧与预定路径相距预定距离地延伸。但是,这前提是在建筑机器的作业方向上的后参考点位于建筑机器的枢转点的后面。如果枢转点理想地位于
建筑机器的中心中,则后参考点因此必须位于机器的后半部中。因此,在这种情况下,首先对左侧弯道进行向左的转向校正,以及首先对右侧弯道进行向右的转向校正。但是,如果后参考点在建筑机器的作业方向上位于建筑机器的枢转点的前面,则对左侧弯道进行向右的转向校正,而对右侧弯道进行向左的转向校正。
[0018]
建筑机器的驱动装置例如可以包括中央手动变速箱和差动驱动器。可替代地,也可以提供使用两个传动系的驱动,传动系均具有变速箱。所述控制和运算单元配置为,使得为了在行驶进入左侧弯道时进行转向校正,增加弯道外侧的右履带的链速和/或减少弯道内侧的左履带的链速。所述控制和运算单元还配置为,使得为了在行驶进入右侧弯道时进行转向校正,增加弯道内侧的左履带的链速和/或减少弯道外侧的右履带的链速。
[0019]
预定路径的建立以及前参考点和后参考点与预定路径之间的距离的检测可以不同的方式进行。
[0020]
一个优选的实施方式涉及使用导向线,该导向线与预定路径相距限定的距离(等距)地被放置。当使用导向线时,控制和运算单元包括第一距离测量装置,该第一距离测量装置具有布置在前参考点处的第一距离传感器,第一距离测量装置被设计成使得可以测量前参考点与描绘预定路径的导向线之间的距离。此外,控制和运算单元包括第二距离测量装置,该第二距离测量装置具有布置在后参考点处的第二距离传感器,第二距离测量装置被设计为使得可以测量后参考点与导向线之间的距离。距离传感器可以是触觉传感器或非接触式传感器,随着建筑机器的前进,借助该传感器扫描导向线。这种扫描系统是现有技术的一部分。
[0021]
替代实施例涉及全球导航卫星系统(gps)的使用。当使用全球导航卫星系统(gps)时,控制和运算单元具有用于接收gps卫星信号的第一gps接收器和第二gps接收器。
[0022]
可以将控制和运算单元配置为,使得使用第一gps接收器和第二gps接收器确定建筑机器的位置和取向。因此,可以基于机器的已知几何形状来确定前参考点和后参考点的位置。所述控制和运算单元还可以配置为,使得从描绘所述预定路径的数据以及来自所述第一gps 接收器和所述第二gps接收器的信号以及从其确定的前参考点的位置来确定前参考点与预定路径之间的距离,并且从描绘预定路径的数据以及来自第一gps接收器和第二gps接收器的信号以及从其确定的后参考点的位置来确定后参考点与预定路径之间的距离。gps接收器优选地是dgps接收器,其对来自基站的校正信号进行解码,以便增加位置确定的准确性。
[0023]
可替代地,可以将第一gps接收器定位在前参考点上和/或将第二 gps接收器定位在后参考点上。以此方式,可以直接确定前参考点和后参考点的位置以及前参考点和后参考点与预定路径之间的距离。
[0024]
在其作业装置为滑模的滑模摊铺机的情况下,本发明的优点特别明显。在滑模摊铺机的情况下,要获得最佳的作业结果,至关重要的是,滑模的后端(混凝土从此处离开)沿着预定路径移动,该预定路径对应于待建造结构例如导向墙的形状。因此,滑模摊铺机的后参考点位于滑模在作业方向上的后端的高度处。后参考点可以在纵向轴线上在滑模的后端处,或者在纵向轴线的左侧或右侧。
附图说明
[0025]
下面参考附图详细解释说明本发明的实施例。
[0026]
在图中:
[0027]
图1以高度示意的图示示出滑模摊铺机的实施例;
[0028]
图2a至图2d示出滑模摊铺机在预定路径上移动期间在时间t
0
至 t
3
时的位置,其中前参考点和后参考点在预定路径上精确地移动;
[0029]
图3a至图3g示出滑模摊铺机在时间t
0
至t
6
时的位置,其中未进行转向校正;
[0030]
图4a至图4j示出滑模摊铺机在时间t
0
至t
9
时的位置,其中进行了转向校正;以及
[0031]
图5示出在右侧曲线上行驶的滑模摊铺机。
具体实施方式
[0032]
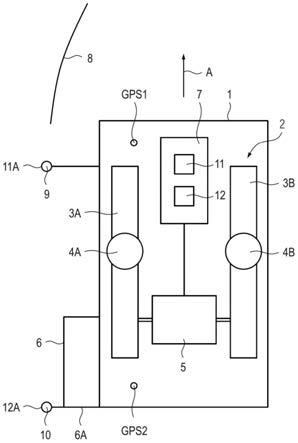
图1以高度简化的示意图示出滑模摊铺机的基本部件,滑模摊铺机作为自推进式建筑机器的示例。由于这样的滑模摊铺机属于现有技术,因此在此仅描述对于本发明必不可少的建筑机器的部件。
[0033]
滑模摊铺机具有由底盘2支撑的机架1。底盘2具有在作业方向上在左侧的履带3a和在作业方向上在右侧的履带3b,它们通过左侧升降装置4a和右侧升降装置4b紧固到机架。左侧升降装置4a和/或右侧升降装置4b分别可以包括多个升降柱。通过提升和降低升降装置 4a,4b,机架1可以相对于地面在高度和倾斜度方面移动。滑模摊铺机的作业方向(行进方向)用箭头a标记。
[0034]
为了驱动左履带3a和右履带3b,滑模摊铺机具有驱动装置5,该驱动装置5例如可以包括中央手动变速箱和差动驱动器或两个单独的传动系,每个传动系具有变速箱,使得每个左履带和右履带都能够以预定的链速(旋转速度)驱动。
[0035]
滑模摊铺机具有装置6,其仅以轮廓示出,用于模制可流动的材料,特别是混凝土,其在下文中被称为混凝土槽6。混凝土从混凝土槽6 的后端6a离开。
[0036]
此外,滑模摊铺机具有控制和运算单元7,其可以形成单独的组件或可以集成在机器控制器中。控制和运算单元7可以由多个组件组成,这些组件不仅可以位于建筑机器上,而且可以位于建筑机器附近。
[0037]
控制运算单元7配置为使得能够预先确定左履带3a和右侧3b的链速。如果左履带和右履带的链速相同,则滑模摊铺机将向前笔直行进。由于链速不同而发生转弯,其中弯道半径由链速的差异确定。因此,滑模摊铺机能够通过控制和运算单元7以这种方式来控制,使得滑模摊铺机在预定路径8上移动。该路径8对应于要建造的结构的形状,并且可以具有笔直部分和/或弯曲部分。
[0038]
图2a至图2d示出滑模摊铺机在地形中在预定路径8上的移动,该预定路径包括笔直部分8a(曲线)和弯曲部分8b(直线)。图2a 至图2d仅示意性地示出左履带3a和右履带3b和滑模6。滑模摊铺机的驱动装置5以这种方式被致动,使得滑模摊铺机在前进时尽可能精确地在预定路径8上或沿着预定路径8移动。为了稳定的控制,指定一个参考点9,该参考点位于滑模摊铺机的前部区域中。前参考点9 和预定路径8之间的距离应该尽可能小,即前参考点应该在预定路径上精确地移动。然而,为了最佳的作业效果,至关重要的是,后参考点10在预定路径8上精确地移动,后参考点10位于滑模6的后端6a 的高度处,混凝土在该后端
6a离开。图2a至图2d示出了这种理想情况,然而,由于有限的转向能力,利用根据本发明的仅具有左履带 3a和右履带3b的滑模摊铺机无法实现该理想情况。
[0039]
图3a至图3g示出基于前参考点9与预定路径8之间的距离a的控制。图3a至图3g示出了在连续时间t=0至t=6时的建筑机器的位置。可以看到,前参考点9在预定路径8上移动。因此,距离a=0。但是,后参考点10不能遵循预定路径8。可以看出,在左侧弯道的情况下,后参考点10漂移至弯道外侧,即漂移至右侧,使得距离b大于零,并且滑模6的后端6a不处于正确的位置下(图3c和图3d)。
[0040]
下面参考图4a至图4j描述根据本发明的控制。图4a至图4j示出在连续时间t=0至t=9时的建筑机器的位置。
[0041]
控制和运算单元7具有第一距离测量装置11和第二距离测量装置 12,以便能够确定前参考点9和后参考点10与预定路径8之间的距离(图1)。在本实施例中,路径8在地形中由张紧的导向线预先确定。
[0042]
第一距离测量装置11具有触觉或非接触的第一距离传感器11a,该第一距离传感器11a布置在前参考点9处,以便测量前参考点9与导向线8之间的距离。第二距离测量装置12具有触觉或非接触的第二距离传感器12a,该第二距离传感器12a布置在后参考点10处,以便测量后参考点和导向线之间的距离(图1)。应当指出的是,为了控制驱动装置5,前距离传感器11a和后距离传感器12a的布置基本上是任意的,只要距离传感器11a,12a处于前参考点9和后参考点10在建筑机器的作业方向上的高度处即可,因为滑模摊铺机的几何尺寸是已知的。因此,距离传感器可以位于横向于作业方向延伸并穿过前参考点或后参考点延伸的轴线上。
[0043]
控制和运算单元7产生用于驱动装置5(未示出)的部件的控制信号,从而可以为左履带3a和右履带3b预先确定不同的链速。这些部件可以包括液压、气动或电气的部件。控制和运算单元7可以包括模拟电路或数字电路。例如,它可以具有通用处理器、用于连续处理数字信号的数字信号处理器(dsp)、微处理器、专用集成电路(asic)、由逻辑元件组成的集成电路(fpga)、或其他集成电路(ic)或硬件部件。数据处理程序(软件)可以在硬件部件上运行,以便能够致动滑模摊铺机的各个部件。
[0044]
控制运算单元7配置为,使得基于在作业方向上相对于机架1的前参考点9与预定路径8之间的距离a,预先确定左履带3a的链速和 /或右履带3b的链速,从而前参考点9在预定路径8上移动。
[0045]
如果在左侧弯道的情况下,前参考点9与弯道内侧的预定路径8 相距一定距离,则控制和运算单元7以这种方式调节左履带3a和右履带3b的链速,使得左侧行进传动装置3a比右侧行进传动装置3b旋转得更快,并且滑模摊铺机向右回转。如果在左侧弯道的情况下,前参考点9与弯道外侧的预定路径8相距一定距离,则控制和运算单元7 以这种方式调节左履带3a和右履带3b的链速,使得右侧行进传动装置3b比左侧行进传动装置3a旋转得更快,并且滑模摊铺机向左回转。因此,在距离目标值(0)和实际值(a)之间进行了连续比较。
[0046]
如图3a至图3d中所示,上述控制意味着后参考点10不遵循路径8,并且后参考点与路径之间的距离增加。在左侧弯道的情况下,则后参考点将移动至弯道外侧(右侧)。
[0047]
随着滑模摊铺机的前进,第二距离测量装置12监测后参考点10 与预定路径8之间的距离b。如果后参考点10与路径8相距距离b,则控制和运算单元7进行转向校正,以便使后
参考点移动回到路径的方向上。转向校正可以这样进行,即控制和运算单元7基于距离b计算校正路径8',该路径8'代替预定路径用作基于前参考点的控制的基础。
[0048]
如果在左侧弯道的情况下,后参考点10在弯道外侧与预定路径相距距离b(图4c),即第二距离测量装置测量距离b,则设定以下值作为目标值用于目标值实际值比较,控制和运算单元7通过计算例如通过将后参考点10与预定路径8的距离b乘以校正因子确定该值。在本实施例中,采用1作为校正因子。这导致用于基于前参考点9的控制的新的、校正的目标值,该目标值对应于后参考点10与预定路径8之间的距离b。因此,指定偏移用于控制,偏移取决于距离b。距离b越大,偏移越大。偏移的指定导致控制和运算单元7增加弯道外侧的右履带3b的速度和/或降低弯道内侧的左履带3a的速度,使得前参考点 9移动到弯道内侧。结果,减小后参考点10与预定路径8之间的距离 b。这些图示出了当后参考点10与预定路径8之间的距离减小时,校正路径8
′
与预定路径8之间的距离减小。当后参考点10再次位于预定路径8上时,不再进行转向校正。在图4i和图4j中,后参考点在其路线上向弯道内侧漂移,使得必须进行向右侧的校正。
[0049]
当行驶进入右侧弯道时,情况是类似的。图5示出右侧弯道,其中后参考点10漂移到曲线的外侧,即漂移到左侧。结果,通过向右回转滑模摊铺机来校正转向。
[0050]
从现有技术已知的多种控制器类型可以用于控制。相应的控制算法是本领域技术人员已知的。
[0051]
根据替代实施例,控制和运算单元7具有第一前gps接收器和第二后gps接收器,优选地为dgps接收器,用于从全球导航卫星系统 (gps)接收gps卫星信号。差分全球定位系统(dgps)允许通过使用固定基站(已知确切位置)发送校正数据提高精确度。为了确定参考点的位置,代替前距离传感器11a和后距离传感器12a,前gps接收器gps1可以位于前参考点处,而后gps接收器gps2可以位于后参考点处(图1)。在该实施例中,导向线被gps坐标系中的预定路径代替,该gps坐标系与滑模摊铺机的移动无关,其中gps坐标系中的路径使用位置数据和方向数据来描述。在该实施例中,控制和运算单元7配置为使得从描绘预定路径的数据和来自第一gps接收器的信号来确定前参考点9与预定路径8之间的距离a,以及从描绘预定路径的数据和来自第二gps接收器的信号来确定后参考点10和预定路径8 之间的距离b。如第一实施例中那样控制两个履带3a,3b的链速。
[0052]
然而,在本实施例中,前gps接收器gps1和后gps接收器gps2 未布置在前参考点和后参考点处,而是布置在任意位置处。图1示出在机架1的前部区域中的前gps接收器gps1和在机架的后部区域中的后gps接收器gps2。控制和运算单元7配置为使得借助于全球定位系统(dgps)确定在gps坐标系中的前gps接收器和后gps接收器的位置,并且从前gps接收器和后gps接收器的位置来确定建筑机器的位置和取向。然后,使用建筑机器的已知几何形状来计算前参考点和后参考点的位置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1