一种用于道路清洗的智能电动水炮的制作方法
1.本实用新型涉及电动水炮车领域,具体的说是涉及一种用于道路清洗的智能电动水炮。
背景技术:
2.目前,传统道路清洗用的水炮主要是依靠车外专人直接去摆动方向来实现道路清洗。在天气条件恶劣的情况下,易让操作人员有中暑风险或发生其它安全事故风险;若装配在洒水车上,则需占的面积大,且用工成本也比较高,不能很好的响应国家轻量化及节能减排的政策。
技术实现要素:
3.本实用新型的目的在于提供一种用于道路清洗的智能电动水炮,用以解决背景技术中的问题。
4.为实现上述目的,本实用新型采取的技术方案为:一种用于道路清洗的智能电动水炮,包含伸缩炮头、炮头伸缩电机、水炮仰角弯管、仰角旋转机构、仰角控制电机、水炮水平弯管、水平旋转机构、水平旋转控制电机及水炮智能控制器;所述水炮仰角弯管一端与所述伸缩炮头连接,另一端与所述仰角旋转机构连接;所述水炮水平弯管一端与所述仰角旋转机构连接,另一端与所述水平旋转机构连接;所述炮头伸缩电机设置在所述伸缩炮头,用于控制所述伸缩炮头伸缩,以实现远射与花洒功能;所述仰角控制电机设置在所述仰角旋转机构上,用于控制所述水炮仰角弯管做上下俯仰转动,以实现水炮上下俯仰运动喷洒;所述水平旋转控制电机设置在所述水平旋转机构上,用于控制所述水炮水平弯管做左右水平转动,以实现水炮左右水平运动喷洒;所述炮头伸缩电机、仰角控制电机及水平旋转控制电机均与所述水炮智能控制器电连接,所述水炮智能控制器与电瓶电连接;
5.使用时,由所述水炮智能控制器与电瓶构成的水炮智能控制系统部分安装在洒水车驾驶室内,由所述伸缩炮头、炮头伸缩电机、水炮仰角弯管、仰角旋转机构、仰角控制电机、水炮水平弯管、水平旋转机构及水平旋转控制电机构成的水炮体部分设置在洒水车驾驶室前端。
6.上述技术方案中,所述伸缩炮头包含炮头外套管及炮头内套管,所述炮头内套管与所述水炮仰角弯管远离仰角旋转机构一端通过螺丝相连接紧固,所述炮头外套管活动套设在所述炮头内套管上并与所述炮头伸缩电机的电机轴一端相连,所述炮头伸缩电机的电机轴另一端与所述炮头内套管相连。
7.上述技术方案中,所述仰角旋转机构包含第一外壳套、第一蜗轮连接套、第一转座管、第一蜗轮及第一蜗杆,所述第一转座管一端与所述水炮水平弯管连接,另一端与所述水炮仰角弯管连接,所述第一蜗轮连接套及第一蜗轮均套设在所述第一转座管上,且第一蜗轮连接套一端与水炮仰角弯管通过螺丝连接固定,另一端与所述第一蜗轮通过螺纹配合连接,所述第一外壳套套设在所述第一蜗轮连接套及第一蜗轮的外部,且第一外壳套一端与
所述第一转座管连接有水炮水平弯管一端通过螺丝固定,另一端套设支承在所述第一蜗轮连接套连接有水炮仰角弯管的端部上,所述第一蜗杆位于所述第一外壳套内部,且第一蜗杆一端与所述第一蜗轮相啮合连接,另一端与仰角控制电机的输出机轴连接。
8.上述技术方案中,所述水平旋转机构包含第二外壳套、第二蜗轮连接套、第二转座管、第二蜗轮及第二蜗杆,所述第二转座管一端与所述水炮水平弯管连接,另一端与安装在洒水车上的入口球阀连接,所述第二蜗轮连接套及第二蜗轮均套设在所述第二转座管上,且第二蜗轮连接套一端与水炮水平弯管通过螺丝连接固定,另一端与所述第二蜗轮通过螺纹配合连接,所述第二外壳套套设在所述第二蜗轮连接套及第二蜗轮的外部,且第二外壳套一端与所述第二转座管连接有入口球阀的一端通过螺丝固定,另一端套设支承在所述第二蜗轮连接套连接有水炮水平弯管的端部上,所述第二蜗杆位于所述第二外壳套内部,且第二蜗杆一端与所述第二蜗轮相啮合连接,另一端与水平旋转控制电机的输出机轴连接。
9.上述技术方案中,所述水炮智能控制器包含控制器盒体,在所述控制器盒体内部设置有cpu控制板、宽电压电源板、伸缩电机伸出继电器、伸缩电机缩回继电器、仰角电机正转继电器、仰角电机反转继电器、水平旋转电机正转继电器、水平旋转电机反转继电器及保险管,在所述控制器盒体的正面上有嵌设仰角调速电位器、方向调速电位器、仰角电机正转开关、仰角电机反转开关、水平旋转电机正转开关、水平旋转电机反转开关、伸缩电机伸出开关、伸缩电机缩回开关、保险开关及总电源开关;
10.所述cpu控制板分别与所述宽电压电源板、伸缩电机伸出继电器、伸缩电机缩回继电器、仰角电机正转继电器、仰角电机反转继电器、水平旋转电机正转继电器、水平旋转电机反转继电器、仰角调速电位器、方向调速电位器、仰角电机正转开关、仰角电机反转开关、水平旋转电机正转开关、水平旋转电机反转开关、伸缩电机伸出开关及伸缩电机缩回开关电连接,所述宽电压电源板与所述保险管电连接,所述保险管与所述总电源开关电连接,所述总电源开关与外部电瓶电连接,所述伸缩电机伸出继电器及伸缩电机缩回继电器均与所述炮头伸缩电机电连接,所述仰角电机正转继电器及仰角电机反转继电器均与所述仰角控制电机电连接,所述水平旋转电机正转继电器及水平旋转电机反转继电器均与所述水平旋转控制电机电连接,所述保险开关与所述保险管电连接。
11.上述技术方案中,在所述水炮仰角弯管与伸缩炮头及仰角旋转机构连接处、以及在所述水炮水平弯管与仰角旋转机构及水平旋转机构连接处均还设置有o形密封圈。
12.上述技术方案中,所述仰角控制电机及水平旋转控制电机均采用的是工作电压为dc24v且具有正反转功能的防水型减速电机。
13.上述技术方案中,所述炮头伸缩电机采用的是工作电压为dc24v且具有正反转功能的电动推杆电机,且电动推杆电机的推杆一端与伸缩炮头的炮头内套管相连,另一端与伸缩炮头的炮头外套管相连。
14.上述技术方案中,所述电瓶采用的是输出直流电压范围为dc12v~dc24v 的电瓶。
15.上述技术方案中,所述伸缩炮头、水炮仰角弯管、仰角旋转机构、水炮水平弯管及水平旋转机构均采用304不锈钢材料制成。
16.本实用新型提供的用于一种道路清洗智能电动水炮工作原理如下:
17.使用前,先将智能电动水炮的装入到洒水车驾驶室前端,让驾驶员能清楚看到智能电动水炮,水炮智能控制器装在洒水车的驾驶室内,方便驾驶员操作,然后打开水炮智能
控制器上的总电源开关,打开智能水炮入口球阀,按动相应的动作开关,使智能电动水炮的方向能自动调整到所要清洗的地方,从而有效克服了传统的水炮需要依靠车外专人直接去摆动方向,避免出现由于天气条件恶劣,让操作人员出现中暑或其它的安全事故风险。
18.与现有技术相比,本实用新型的优点是:1)不用靠车外专人直接去摆动水炮方向,有效克服了恶劣天气条件,易让操作人员有中暑风险;2)驾驶员在车内操作控制系统,有效克服了靠车外专人操作的事故风险;3)操作更方便、稳定性更高、更安全与环保,可广泛使用于各种洒水罐式车辆上。
附图说明
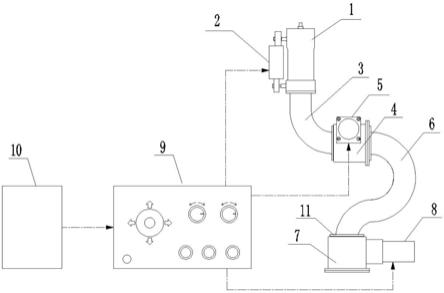
19.图1为本实用新型的结构示意图;
20.图2为本实用新型智能电动水炮中水炮体的剖视图;
21.图3为图2中m节点放大图;
22.图4为图2中n节点放大图;
23.图5为图2中t节点放大图;
24.图6为本实用新型智能电动水炮中智能控制器的结构示意图;
25.图7为本实用新型智能电动水炮的工作原理框图;
26.附图标记说明:
27.1、伸缩炮头;1.1、炮头外套管;1.2、炮头内套管;
28.2、炮头伸缩电机;
29.3、水炮仰角弯管;
30.4、仰角旋转机构;4.1、第一外壳套;4.2、第一蜗轮连接套;4.3、第一转座管;4.4、第一蜗轮;4.5、第一蜗杆;
31.5、仰角控制电机;
32.6、水炮水平弯管;
33.7、水平旋转机构;7.1、第二外壳套;7.2、第二蜗轮连接套;7.3、第二转座管;7.4、第二蜗轮;7.5、第一蜗杆;
34.8、水平旋转控制电机;
35.9、水炮智能控制器;9.1、控制器盒体;9.2、cpu控制板;9.3、宽电压电源板;9.4、伸缩电机伸出继电器;9.5、伸缩电机缩回继电器;9.6、仰角电机正转继电器;9.7、仰角电机反转继电器;9.8、水平旋转电机正转继电器;9.9、水平旋转电机反转继电器;9.10、保险管;9.11、仰角调速电位器;9.12、方向调速电位器;9.13、仰角电机正转开关;9.14、仰角电机反转开关;9.15、水平旋转电机正转开关;9.16、水平旋转电机反转开关;9.17、伸缩电机伸出开关;9.18、伸缩电机缩回开关;9.19、保险开关;9.20、总电源开关;
36.10、电瓶;
37.11、o形密封圈。
具体实施方式
38.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合附图和具体实施方式,进一步阐述本实用新型是如何实施的。
39.参阅图1所示,本实用新型提供的一种用于道路清洗的智能电动水炮,包含伸缩炮头1、炮头伸缩电机2、水炮仰角弯管3、仰角旋转机构4、仰角控制电机5、水炮水平弯管6、水平旋转机构7、水平旋转控制电机8及水炮智能控制器9;其中:水炮仰角弯管3一端与伸缩炮头1相连,另一端与仰角旋转机构4相连;水炮水平弯管6一端与仰角旋转机构4相连,另一端与水平旋转机构7相连;炮头伸缩电机2设置在伸缩炮头1,用于控制伸缩炮头1伸缩,以实现远射与花洒功能;仰角控制电机5固定在仰角旋转机构4上,用于控制水炮仰角弯管3做上下俯仰转动,以实现水炮上下俯仰运动喷洒;水平旋转控制电机8固定在水平旋转机构7上,用于控制水炮水平弯管6做左右水平转动,以实现水炮左右水平运动喷洒;炮头伸缩电机2、仰角控制电机5及水平旋转控制电机8均与水炮智能控制器9电连接,水炮智能控制器9与电瓶10电连接;
40.使用时,由水炮智能控制器9与电瓶10构成的水炮控制系统安装在洒水车驾驶室内,由伸缩炮头1、炮头伸缩电机2、水炮仰角弯管3、仰角旋转机构4、仰角控制电机5、水炮水平弯管6、水平旋转机构7及水平旋转控制电机8构成的水炮体部分设置在洒水车驾驶室前端。
41.如图2和图3所示,在本实用新型中,伸缩炮头1包含炮头外套管1.1 及炮头内套管1.2,炮头内套管1.2与水炮仰角弯管3远离仰角旋转机构4 一端通过螺丝相连接紧固,炮头外套管1.1活动套设在炮头内套管1.2上并与炮头伸缩电机2的电机轴一端相连,炮头伸缩电机2的电机轴另一端与炮头内套管1.2相连。
42.如图2和图4所示,在本实用新型中,仰角旋转机构4包含第一外壳套4.1、第一蜗轮连接套4.2、第一转座管4.3、第一蜗轮4.4及第一蜗杆 4.5;其中,第一转座管4.3一端与水炮水平弯管6连接,另一端与水炮仰角弯管3连接,第一蜗轮连接套4.2及第一蜗轮4.4均套设在第一转座管 4.3上,且第一蜗轮连接套4.2一端与水炮仰角弯管3通过螺丝连接固定,另一端与第一蜗轮4.4通过螺纹配合连接,第一外壳套4.1套设在第一蜗轮连接套4.2及第一蜗轮4.4的外部,且第一外壳套4.1一端与第一转座管4.3连接有水炮水平弯管6一端通过螺丝固定,另一端套设支承在第一蜗轮连接套4.2连接有水炮仰角弯管3的端部上,第一蜗杆4.5位于第一外壳套4.1内部,且第一蜗杆4.5一端与第一蜗轮4.4相啮合连接,另一端与仰角控制电机5的输出机轴连接;工作时,仰角旋转机构4通过其内部设有的第一蜗轮4.4与第一蜗杆4.5,在仰角控制电机5与水炮智能控制器9的配合下,带动整个水炮体部分实现上下俯仰运动。
43.如图2和图5所示,在本实用新型中,水平旋转机构7包含第二外壳套7.1、第二蜗轮连接套7.2、第二转座管7.3、第二蜗轮7.4及第二蜗杆 7.5;其中,第二转座管7.3一端与水炮水平弯管6连接,另一端与安装在洒水车上的入口球阀(图中未示出)连接,第二蜗轮连接套7.2及第二蜗轮7.4均套设在第二转座管7.3上,且第二蜗轮连接套7.2一端与水炮水平弯管6通过螺丝连接固定,另一端与第二蜗轮7.4通过螺纹配合连接,第二外壳套7.1套设在第二蜗轮连接套7.2及第二蜗轮7.4的外部,且第二外壳套7.1一端与第二转座管7.3连接有入口球阀的一端通过螺丝固定,另一端套设支承在第二蜗轮连接套7.2连接有水炮水平弯管6的端部上,第二蜗杆7.5位于第二外壳套7.1内部,且第二蜗杆7.5一端与第二蜗轮 7.4相啮合连接,另一端与水平旋转控制电机8的输出机轴连接;工作时,水平旋转机构7通过其内部设有的第二蜗轮7.4与第二蜗杆7.5,在水平旋转控制电机8与水炮智能控制器9的配合下,
带动整个水炮体部分实现左右水平摆动。
44.如图2和图6所示,在本实用新型中,水炮智能控制器9包含控制器盒体9.1,在控制器盒体9.1内部设置有cpu控制板9.2、宽电压电源板9.3、伸缩电机伸出继电器9.4、伸缩电机缩回继电器9.5、仰角电机正转继电器 9.6、仰角电机反转继电器9.7、水平旋转电机正转继电器9.8、水平旋转电机反转继电器9.9及保险管9.10,在控制器盒体9.1的正面上有嵌设仰角调速电位器9.11、方向调速电位器9.12、仰角电机正转开关9.13、仰角电机反转开关9.14、水平旋转电机正转开关9.15、水平旋转电机反转开关 9.16、伸缩电机伸出开关9.17、伸缩电机缩回开关9.18、保险开关9.19 及总电源开关9.20;
45.其中,cpu控制板9.2分别与宽电压电源板9.3、伸缩电机伸出继电器 9.4、伸缩电机缩回继电器9.5、仰角电机正转继电器9.6、仰角电机反转继电器9.7、水平旋转电机正转继电器9.8、水平旋转电机反转继电器9.9、仰角调速电位器9.11、方向调速电位器9.12、仰角电机正转开关9.13、仰角电机反转开关9.14、水平旋转电机正转开关9.15、水平旋转电机反转开关9.16、伸缩电机伸出开关9.17及伸缩电机缩回开关9.18电连接,宽电压电源板9.3与保险管9.10电连接,保险管9.10与总电源开关9.20电连接,总电源开关9.20与外部电瓶10电连接,伸缩电机伸出继电器9.4及伸缩电机缩回继电器9.5均与炮头伸缩电机2电连接,仰角电机正转继电器9.6及仰角电机反转继电器9.7均与仰角控制电机5电连接,水平旋转电机正转继电器9.8及水平旋转电机反转继电器9.9均与水平旋转控制电机8电连接,保险开关9.19与保险管9.10电连接。
46.其中,仰角调速电位器9.11,用于控制调节仰角控制电机5的转速;方向调速电位器9.12,用于控制调节水平旋转控制电机的转速;仰角电机正转开关9.13与仰角电机反转开关9.14、用于控制仰角控制电机5启动正反转指令;水平旋转电机正转开关9.15、水平旋转电机反转开关9.16、用于控制水平旋转控制电机8启动正反转指令;伸缩电机伸出开关9.17及伸缩电机缩回开关9.18、用于控制炮头伸缩电机2启动伸出与缩回指令。
47.工作时,当按下控制器盒体9.1正面上的伸缩电机伸出开关9.17时,伸缩电机伸出继电器9.4闭合,炮头伸缩电机2控制伸缩炮头1伸出,实现电动水炮远射功能;当按下控制器盒体9.1正面上的伸缩电机缩回开关 9.18时,伸缩电机缩回继电器9.5闭合,炮头伸缩电机2控制伸缩炮头1 伸出缩回,实现电动水炮花洒功能;当按下控制器盒体9.1正面上的仰角电机正转开关9.13时,仰角控制电机5控制仰角旋转机构4带动水炮仰角弯管3上仰运动,实现电动水炮上仰运动喷洒;当按下控制器盒体9.1正面上的仰角电机反转开关9.14时,仰角控制电机5控制仰角旋转机构4带动水炮仰角弯管3下俯运动,实现电动水炮下俯运动喷洒;当按下控制器盒体9.1正面上的水平旋转电机正转开关9.15时,水平旋转控制电机8控制水平旋转机构7带动整个电动水炮左转,当按下控制器盒体9.1正面上的水水平旋转电机反转开关9.16时,水平旋转控制电机8控制水平旋转机构7带动整个电动水炮右转。
48.为避免水经过时,各旋转运动连接部位不发生渗漏问题,参阅图2所示,在本实用新型中,在水炮仰角弯管3与伸缩炮头1及仰角旋转机构4 连接处、以及在水炮水平弯管6与仰角旋转机构4及水平旋转机构7连接处均还设置有o形密封圈11。
49.作为本实用新型的一种实施例:仰角控制电机5及水平旋转控制电机8 均采用的是工作电压为dc24v且具有正反转功能的防水型减速电机。
50.作为本实用新型的一种实施例:炮头伸缩电机2采用的是工作电压为 dc24v且具
有正反转功能的电动推杆电机,且电动推杆电机的推杆一端与伸缩炮头1的炮头内套管1.2相连,另一端与伸缩炮头1的炮头外套管1.1 相连。
51.作为本实用新型的一种实施例:电瓶10采用的是输出直流电压范围为 dc12v~dc24v的电瓶。
52.作为本实用新型的一种实施例:伸缩炮头1、水炮仰角弯管3、仰角旋转机构4、水炮水平弯管6及水平旋转机构7均采用304不锈钢材料制成;且能承受的最大压力为0.8mpa。
53.本实用新型提供的一种用于道路清洗的智能电动水炮,其工作原理具体如下:
54.使用前,先将智能电动水炮的炮体部分(由伸缩炮头1、炮头伸缩电机2、水炮仰角弯管3、仰角旋转机构4、仰角控制电机5、水炮水平弯管6、水平旋转机构7及水平旋转控制电机8构成)装入到洒水车驾驶室前端,让驾驶员能清楚看到智能电动水炮的炮体,将智能电动水炮的控制系统(由水炮智能控制器9与电瓶10构成)装在洒水车的驾驶室内,方便驾驶员操作;然后,打开总电源开关(位于水炮智能控制器9上),打开智能水炮的入口球阀(位于洒水车上),按动相应的执行开关(即位于水炮智能控制器 9控制器盒体9.1正面的各类执行开关),使智能电动水炮的方向自动调整至所要清洗的地方。这样可以有效克服传统的水炮需要依靠车外专人去摆动方向,避免了由于天气条件恶劣,易让操作人员有中暑风险及事故风险的问题。
55.本实用新型提供的一种用于道路清洗的智能电动水炮,具有操作方便、安全可靠、环保、经济、以及泄漏事故率低等优点,可广泛使用于各类洒水罐式车辆上。
56.最后说明,以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1