用于捣固轨道的轨道维护机和方法与流程
1.本发明涉及一种用于捣固轨道的轨道维护机,所述轨道的轨枕支撑在道碴床中且铁轨装配到轨枕上,所述轨道维护机具有机架和捣固单元,所述机架能够在轨上行走机构上移动,所述捣固单元包括被下降到道碴床中且设置成振动并朝彼此挤压的捣固工具,其中沿作业方向在捣固单元的上游布置有用于将实时图像传输到输出装置的照相机。本发明还涉及一种用于操作轨道维护机的方法。
背景技术:
2.根据wo 2018/206214 a1已知一种通用轨道维护机,该通用轨道维护机配备有用于远程控制完成捣固过程的辅助系统。在该发明中,照相机对准轨道维护机的作业单元,用于将实时图像传输到驾驶室中的显示设备。这就无需布置单独的工作舱来观察作业单元。照相机的图像片段主要对应于在这种工作舱中操作者的视野。
技术实现要素:
3.本发明的目的是改进实时图像来远程控制上述类型的轨道维护机的捣固单元。还将提供一种用于操作相应的轨道维护机的改进方法。
4.根据本发明,这些目的通过权利要求1和9的特征来实现。本发明的有利的进一步改进来自于从属权利要求。
5.在本发明中,沿作业方向在捣固单元的上游布置有第一照相机系统,该第一照相机系统用于将轨道的第一表面区域记录为第一图像片段,而沿作业方向在捣固单元的下游布置有第二照相机系统,该第二照相机系统用于将轨道的第二表面区域记录为第二图像片段,其中所记录的图像片段部分重叠,并且其中输出装置被配备用于在合并图像中输出所述图像片段。这种视频系统的布置为操作者提供了位于捣固单元下方的轨道的无遮挡实时图像。将在前置照相机系统的图像片段中的被捣固单元的部件挡住的轨道的区域记录在后置照相机系统的图像片段上。反之亦然,前置照相机系统记录使用后置照相机系统时被挡住的区域。通过紧固点的几何关系以及照相机系统和捣固单元的取向,在合并图像中还可以知道捣固单元的位置。因此,输出装置为操作者提供了与捣固单元的实际位置相关的待被捣固的当前轨道区域的全面图示。利用该实时信息,可以有效地将捣固单元远程定位在相应的轨枕上方,并且可以执行循环捣固。
6.该解决方案的一种进一步改进设想,捣固单元被布置成用于通过移位驱动装置相对于照相机系统进行移位,并且输出装置被配备用于显示捣固单元的当前位置。为此,例如连续记录和评估移位驱动装置的移位路径。例如,这涉及捣固单元沿作业方向或横向于作业方向的移位以及捣固单元围绕竖直轴线的旋转。
7.在本发明的一个有利实施例中,照相机系统具有朝向斜下方的照相机轴线,其中设置计算机单元以用于对所记录的图像片段的失真进行矫正。斜向下的照相机轴线使得可以记录较大的图像片段,而没有被遮挡的区域。所执行的失真校正的效果在于:在俯视图中
合并图像提供了轨道的真实整体图示。
8.进一步的改进设想,每个照相机系统包括沿机器横向方向彼此邻近布置的至少两个照相机以用于记录部分图像片段,彼此邻近布置的两个照相机的部分图像片段重叠,并且输出装置被配备用于合并所有的部分图像片段。利用这种布置,可以得到没有遮挡区域的额外图像内容,这增加了合并图像的信息内容。还可以使用具有较长焦距的照相机镜头,这减少了为了避免失真误差所需要的努力。
9.在本发明的一种进一步改进中,在轨道的被记录的表面区域中布置有照明装置,该照明装置具有朝向下方的光束,该光束用于产生特别是呈照明图案的形式的光标记。该光标记能够在合并图像中看见,并且为操作者提供额外的位置信息。
10.为了避免阳光直射对记录质量产生负面影响,有意义的的是,照相机系统被配备用于记录红外光,并且布置至少一个红外光源来照亮待被记录的轨道的表面区域。红外光源也用于可能产生的光标记。
11.一个有利的改进设想,沿作业方向在第一照相机系统的上游布置有用于记录轨枕位置的传感器装置。当远程控制捣固单元时,这种传感器系统为操作者提供额外的支持。
12.这里,有利的是,输出装置与传感器装置耦合以用于在合并图像中显示所记录的轨枕位置。图示的轨枕例如用数字标记界定。这在定位捣固单元时提高了安全性。
13.有利地,在侧向上邻近捣固单元额外地布置至少一个照相机,用于记录捣固工具的当前竖直位置。这样,还可以远程控制捣固工具进入道碴床中的穿透深度。
14.利用根据本发明所述的用于操作轨道维护机的方法,借助于输出装置将合并图像实时显示给操作者,其中使用合并图像相对于轨道定位捣固单元。通过在俯视图中示出轨道,可以以简单的方式将捣固工具定位在相应的轨枕盒上方。
15.在所述方法的一个有利的进一步改进中,记录捣固单元的当前位置,其中将由此得到的捣固工具的穿透点显示在合并图像中。通过传感器和计算机单元有利地计算布置在捣固工具下端处的捣固镐相对于轨道的当前位置并将其显示在合并图像中。这对于可移位或可旋转的捣固单元以及在使用可枢转的捣固镐时尤其有意义。因此,可以实时向操作者显示在下降过程中捣固镐将在哪些点穿透到道碴床中。
16.所述方法的进一步改进设想,借助于照明装置在轨道的被记录的表面区域上产生光标记。例如,捣固单元的当前位置可以用这样的标记显示。
17.还有利的是,借助于照明装置产生照明图案并且通过匹配照明图案来合并图像片段。这样,可以执行图像片段的简单合并(拼接)。
18.一种有利的方法改进提供了进一步的可能性,其中根据照相机系统的所记录的图像数据计算轨道的被记录的表面区域的三维图示。这样,可以借助于输出装置来示出具有道碴床、轨枕和铁轨的深度信息的轨道的三维实时模型。
19.如果在轨道维护机的向前运动期间借助于传感器装置记录轨枕位置并且如果在合并图像中将轨枕位置显示给操作者,则可以更容易地将捣固单元定位在轨枕上方。利用这种丰富的实时信息,即使在光线不足的条件下也可以进行安全操作。例如,在图示中利用彩色边框标记所述轨枕。
20.如果通过辅助系统预先确定捣固位置并且如果在合并图像中将所建议的捣固位置显示给操作者,则操作者的额外负担就会减轻。然后,通过将捣固工具的当前位置与所建
议的捣固位置对齐来实现捣固单元的定位。
附图说明
21.下面将参照附图通过示例的方式描述本发明。在附图中:
22.图1示意性地示出了轨道维护机;
23.图2以侧视图示意性地示出了在轨道上方的捣固单元和照相机系统;
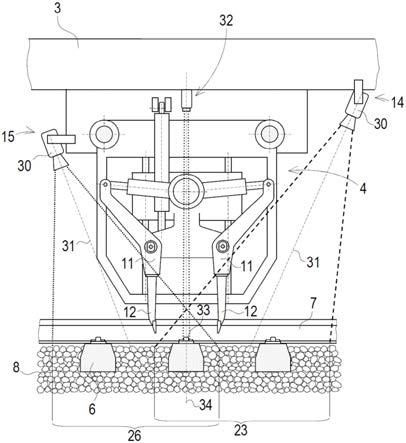
24.图3以通过轨道的截面图示意性地示出了图2的布置;
25.图4示意性地示出了具有被记录的表面区域的轨道的俯视图;
26.图5示意性地示出了输出装置;以及
27.图6以侧视图示意性地示出了多轨枕捣固单元。
具体实施方式
28.图1中所示的轨道维护机1是捣固机,并且该轨道维护机1包括能够在轨上行走机构2上移动的机架3。在机架3上布置有捣固单元4。捣固机用于对轨道5进行处理,其中装配到轨枕6上的铁轨7支撑在道碴床8中。轨道维护机1还可以具有附加功能。轨道维护机1例如包括用于道碴清除的清除装置或用于轨道稳定的稳定单元。
29.在捣固过程期间,将由轨枕6和铁轨7形成的轨排提升到目标位置中,并且通过起拨单元9和测量系统10可以使轨排发生侧向移位。为了固定这个位置,将在其下端布置有捣固镐12的振动捣固工具11浸入道碴床8中。浸入的捣固镐12朝向彼此挤压,并且以这种方式压实位于被提升的轨枕6的下方的道碴。
30.沿作业方向13在捣固单元4的上游布置有第一照相机系统14,在捣固单元4的下游布置有第二照相机系统15。照相机系统14、15与容纳在轨道维护机1的舱室17中的输出装置16耦合。在该舱室17中还设置了用于远程控制捣固单元4的具有操作元件的操作装置18。特别地,捣固单元4和起拔单元9的各种驱动装置和轨道维护机1的行进驱动装置可以通过机器控制器19进行操作。
31.沿作业方向13在第一照相机系统14的上游可选地布置有用于记录轨枕位置的传感器装置20。例如,该传感器装置20包括用于记录表面轮廓的旋转激光扫描仪21和用于检测铁轨紧固件的电涡流传感器22。通过合并传感器信号可以精确地记录相应轨枕6的位置。
32.图2和图3中示出了照相机系统14、15的布置的示例。利用第一照相机系统14将轨道5的第一表面区域23记录为第一图像片段24、25(图4)。第二照相机系统15将轨道5的第二表面区域26记录为第二图像片段27、28。这里,重要的是图像片段24、25、27、28部分重叠,使得它们部分地显示相同的图像内容。
33.在输出装置16中,图像片段24、25、27、28被合并为位于捣固单元4的下方的轨道5的图像29。将图像片段24、25、27、28合并为一个完整图像29的这种合并也称为拼接。因为这是实时记录的输出,所以它使得操作者能够基于该合并图像29来控制捣固单元4。这里规定足够高的帧速率用以记录捣固过程的动态。
34.图5示出了在输出装置16的监视器窗口中的图4所示的图像片段24、25、27、28的合并图像29。两个部分图像片段24、25或27、28被分别分配给相应的表面区域23、26。如图3中可见,用于记录部分图像片段24、25或27、28的相应照相机系统14、15包括沿机器横向方向
彼此邻近布置的两个照相机30。相应照相机系统14、15的部分图像片段24、25或27、28重叠以进行无损失拼接。
35.如果照相机30具有斜向下取向的照相机轴线31(图2),则有利于最小化被捣固单元4的部件遮挡的轨道5。通过计算机单元对与此密切相关的图像片段24、25、27、28的失真进行矫正。为此,例如,每个照相机或每个照相机系统14、15包括其自己的计算机单元。输出装置16中的公共计算机单元也可用于对图像片段24、25、27、28中的失真进行矫正。
36.例如,使用具有高清(hd)分辨率和高景深的摄像机30。对视频数据进行实时处理并作为合并图像29显示在输出装置16中。通过有效压缩所述视频数据,可以存储这些视频数据,而无需花费太多精力来记录工作过程。
37.如果布置照明装置32,则可以更容易地远程控制捣固单元4,照明装置32通过朝向下方的光束在被记录的表面区域23、26内产生光标记33。这里,如果光标记33产生照明图案,则是有利的。照明装置32的光束有利地沿着捣固单元4的对称轴线34对齐。这样,当对称轴线34位于轨枕6上方时,其还能够显示给操作者。光标记33还可以用于拼接图像片段24、25、27、28。例如,可以将所谓的平行光束led用作照明装置32的发光体。
38.如果提供传感器装置20,则还可以知道所检测的轨枕位置。捣固单元4相对于所检测的轨枕6的位置根据传感器装置20的布置和捣固单元4在机架3上的布置之间的已知几何关系获得。与输出装置16的耦合使得能够利用标记35在合并图像29中显示轨枕6的位置。这样,如果轨枕6被道碴部分覆盖,则操作者也可以识别捣固单元4相对于轨枕6的当前位置。
39.如果输出装置16与用于预先确定捣固位置的辅助系统耦合以在合并图像29中显示所建议的捣固位置,则对操作者的要求会进一步降低。例如,借助于传感器装置20检测轨道中的障碍物,并且辅助系统向操作者建议相应调整的捣固位置。在任何情况下,如果在合并图像29中显示当前根据捣固单元4的位置获得的捣固镐12进入道碴床8中的穿透点36,则是有利的。然后,如果需要,将这些显示的穿透点36与所建议的捣固位置对齐。
40.有利地,输出装置16被配备用于显示附加信息。如从图5可以清楚地看出,例如,轨道数据37显示在轨枕6旁边。在另一个窗口中,示出了捣固单元4或轨道维护机1的其他设备的状态数据38。显示器的这些附加显示为操作者提供了全面的概况,并且使得能够对不期望的情况做出快速反应。
41.对于用于同时捣固若干个轨枕6的多轨枕捣固单元39,如果在各个单元组件40之间布置额外的照相机30(图6),则是有意义的。这样,额外的部分图像片段24、25、27、28可用于产生位于多轨枕捣固单元39下方的轨道5的合并图像29。在每个单元组件40上方额外地布置照明装置32,用以标记相应的对称轴线34。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1