轨道道床断面全自动扫描系统及操作方法与流程
1.本发明涉及铁路铺轨施工技术领域,具体为轨道道床断面全自动扫描系统及操作方法。
背景技术:
2.在现有的砟轨道铺轨施工中,涉及多遍数的起道上砟以及后期整道补砟作业,每次上砟的部位、方量较难控制,目前主要利用设计标准断面先计算一段区域的总上砟量,然后由经验丰富的线路工沿线观察线路情况,再决定该区域段上砟部位。目前多数施工项目在道砟量上存在亏方情况,道砟道床的断面情况对上砟施工能够提供有效的参考。现在没有专门针对于碎石道床断面扫描的全自动设备,能够稳定地对道床进行扫描成像,同时现有轨道移动装置在运行时,行走装置和轨道之间往往有缝隙存在,行走轮由于缝隙的存在行走时会发生偏移,缝隙的存在虽然不影响行走,但行走时极为不稳定,容易对碎石道床断面扫描结果造成影响。
3.为此,我们提出了轨道道床断面全自动扫描系统及操作方法以解决上述弊端。
技术实现要素:
4.本发明的目的在于提供轨道道床断面全自动扫描系统及操作方法,以解决上述背景技术中提出的问题。
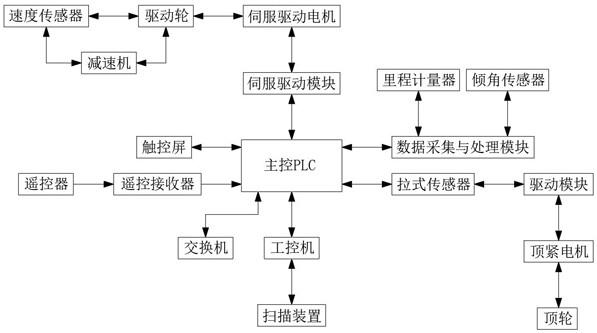
5.为实现上述目的,本发明提供如下技术方案:轨道道床断面全自动扫描系统及操作方法,包括车体及数据处理模块,所述车体上设置有扫描装置,所述扫描装置与数据处理模块的工控机的输出端通过信号连接,所述工控机的输出端与主控plc的一个输入端连接,所述主控plc的一个输入端与交换机的输出端连接,所述主控plc的一个输入端与遥控接收器的输出端连接,遥控接收器的输入端与遥控器的输出端连接,所述主控plc与触控屏通过信号连接,所述主控plc的其中一个输入端与伺服驱动模块的输出端连接,所述伺服驱动模块的输出端与伺服驱动电机的输入端连接,所述伺服驱动电机与驱动轮连接,所述主控plc的其中一个输入端与数据采集与处理模块的输出端连接,所述数据采集与处理模块的一个输出端与里程计量器的输入端连接,所述数据采集与处理模块的另一个输出端与倾角传感器的输入端连接,所述主控plc的一个输入端与拉式传感器的输出端连接,所述拉式传感器的输出端与驱动装置连接。
6.优选的,所述驱动轮的与速度传感器连接,所述速度传感器的输出端与减速机的输入端连接,所述减速机与驱动轮连接。
7.优选的,所述驱动装置包括有:驱动模块、顶紧电机和顶轮,所述拉式传感器的输出端与驱动模块的输入端连接,所述驱动模块的输出端与顶紧电机的输入端连接,所述顶紧电机与顶轮连接。
8.优选的,所述车体包括车架、行走装置、顶紧装置,所述车架上设置有底座支架,底座支架上安装有扫描支架,所述扫描装置安装在所述扫描支架上;
所述行走装置由主动组件以及从动组件组成,所述主动组件由安装在所述车架前端且与待扫描道床所在钢轨表面贴合的主动轮以及用于驱动主动轮的动力驱动部件组成,所述从动组件由安装在所述车架后端的摆动梁以及安装在摆动梁两端的从动轮组成,所述摆动梁上设置有连接部,所述连接部铰接在所述车架上并带动所述摆动梁两端的从动轮摆动,所述从动轮与待扫描道床所在钢轨表面贴合;所述顶紧装置由安装在所述车架底部的用于顶紧待扫描道床所在一侧钢轨的第一顶紧组件以及安装在所述车架底部的用于调整并顶紧待扫描道床所在另一侧钢轨的第二顶紧组件组成。
9.优选的,所述扫描支架设置有用于保护所述扫描装置的护罩,所述车架两侧设置有用于搬运的提手。
10.优选的,所述主动轮的数量为两个且均匀分布在所述道床两侧的钢轨上,所述车架上设置有用于安装所述主动轮的安装座,两个所述主动轮同步动作,两个所述主动轮均设置有独立的动力驱动部件,所述动力驱动部件为伺服电机及与伺服电机相连的减速机,所述连接部位于所述摆动梁的中部。
11.优选的,所述第一顶紧组件由安装在车架底部的第一支架以及安装在所述第一支架上的第一顶紧轮组成,所述第一顶紧轮与待扫描道床所在钢轨侧壁贴合,所述第一顶紧组件的数量与该第一顶紧组件所顶紧的钢轨上的行走轮的数量相同,所述行走轮包括该钢轨上布置的主动轮以及从动轮。
12.优选的,所述第二顶紧组件由第二支架、螺纹伸缩杆、第二顶紧轮以及拉式传感器组成,所述第二支架安装在所述车架的底部,所述拉式传感器的一端连接所述第二支架,所述拉式传感器的另一端与螺纹伸缩杆的固定端相连,螺纹伸缩杆上设置有用于驱动螺纹伸缩杆的顶紧电机,第二顶紧轮安装在螺纹伸缩杆的移动端,顶紧电机带动螺纹伸缩杆伸缩并使第二顶紧轮顶紧待扫描道床所钢轨。
13.轨道道床断面全自动扫描系统及操作方法,包括如下步骤:s1:打开电源,使系统进入带电工作,通过触控屏向主控plc内设置小车参数,同时设置小车行驶距离;s2:设置完成后,通过主控plc向拉式传感器传输启动信号,拉式传感器向驱动模块传输启动信号,驱动模块控制顶紧电机运行,顶紧电机带动顶轮伸出,使顶轮与轨道自动顶紧;s3:准备完成后,通过触控屏点击开始扫描,通过主控plc对传感器输入启动信号,传感器控制扫描装置开始扫描,左上角扫描装置接收区显示当前扫描数据;s4:通过遥控器对遥控接收器传输启动信息,遥控接收器对主控plc传输启动信息,主控plc对伺服驱动模块传输启动信息,伺服驱动模块控制伺服驱动电机启动,伺服驱动电机控制驱动轮转动,此时小车开始行走,小车带动扫描装置行走,通过速度传感器实时监测小车行走速度。
14.使用时,将扫描车放置在钢轨上,调整车架与钢轨之间的距离,使第一顶紧组件的第一顶紧轮顶紧钢轨,作为优选的,所述第一顶紧组件的第一顶紧轮和钢轨之间还设置有压力传感器,用于检测第一顶紧组件与钢轨之间的顶紧力,所述第一顶紧轮和钢轨之间的压力达到预设标准,然后通过第二顶紧组件调节并顶紧待扫描道床所在另一侧钢轨,具体
的,第二顶紧轮与钢轨之间未顶紧时,拉式传感器感应拉力值低于预设值,顶紧电机驱动螺纹伸缩杆转动,直至带动第二顶紧轮顶紧钢轨,以满足扫描车在钢轨上稳定行走的要求。
15.同时,主动轮和从动轮在顶紧装置的作用下可以稳定在钢轨上行走,同时从动轮安装在摆动梁上,可以随钢轨的变化作出适应性的调整,四轮形成三点支撑系统,确保扫描小车的车轮与轨道密贴。
16.与现有技术相比,本发明的有益效果是:本发明结构设置合理,功能性强,具有以下优点:1.通过主控plc、触控屏和里程计量器配合,可以方便的对行驶里程进行设置,通过设置的速度传感器实时监测两个主动轮和两个从动轮的转速,从而保证有砟轨道扫描小车自动匀速行驶,稳定的扫描有砟轨道的道床外观,通过将伺服驱动模块和数据采集与处理模块分开安装,使两部分相对独立,彻底屏蔽了电机脉冲对数据的干扰,保证了有砟轨道扫描小车的正常工作运行,当速度较快时,速度传感器对减速机传输启动信息,减速机控制驱动轮的转速,从而保证小车的行驶速度处于设置的范围。
17.2.通过安装在所述车架底部的用于顶紧待扫描道床所在一侧钢轨的第一顶紧组件以及安装在所述车架底部的用于调整并顶紧待扫描道床所在另一侧钢轨的第二顶紧组件,来实现行走轮和钢轨之间的调整,自动顶紧,可以缩小车体与轨道之间的间隙,满足了扫描车在钢轨上稳定行走的要求;
附图说明
18.图1为本发明的扫描系统示意图;图2为本发明车架的结构示意图;图3为本发明车架的侧视图;图4为本发明车架的俯视图;图5为本发明车架的第一顶紧组件及第二顶紧组件的位置示意图。
19.图中,1、车架;2、摆动梁;4、底座支架;5、扫描支架;6、主动轮;7、动力驱动部件;8、控制面板;9、顶紧装置;10、提手;11、电池模块;12、扫描装置;13、护罩;14、标尺;15、从动轮;901、第一顶紧组件;902、第二顶紧组件;9011、第一支架;9012、第一顶紧轮;9021、第二支架;9022、螺纹伸缩杆;9023、第二顶紧轮;9024、拉式传感器;9025、顶紧电机。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.请参阅图1至图5,本发明提供一种技术方案:一种碎石道床断面扫描用车体结构,包括车体及数据处理模块,所述车体上设置有扫描装置12,扫描装置12与数据处理模块的工控机的输出端通过信号连接,工控机的输出端与主控plc的一个输入端连接,所述主控plc的一个输入端与交换机的输出端连接,主控plc的一个输入端与遥控接收器的输出端连接,遥控接收器的输入端与遥控器的输出端
连接,遥控器使用前需确保急停按钮为被拍下,使用时将遥控器的开始按钮打到开始挡位。在小车行走测量中,中途停止行走时,可再次点击一键前进按钮,小车停止前进,主控plc采用型号为spc-stw-2612cm,主控机采用为导轨式4g工业级路由器r300s。
22.主控plc与触控屏通过信号连接,主控plc的其中一个输入端与伺服驱动模块的输出端连接,伺服驱动模块的输出端与伺服驱动电机的输入端连接,伺服驱动电机与驱动轮连接,驱动轮的与速度传感器连接,速度传感器的输出端与减速机的输入端连接,减速机与驱动轮连接,通过伺服驱动模块来控制两个主动轮6和两个从动轮15的运行,通过设置的速度传感器实时监测两个主动轮6和两个从动轮15的转速,从而保证有砟轨道扫描小车自动匀速行驶,稳定的扫描有砟轨道的道床外观,其中触控屏型号为gh043e,伺服驱动模块的型号为fd124s-ca-00,伺服驱动电机的型号为smc60s-0020-30mak-3dsu,减速机的型号为nmrv040。
23.主控plc的其中一个输入端与数据采集与处理模块的输出端连接,数据采集与处理模块的一个输出端与里程计量器的输入端连接,数据采集与处理模块的另一个输出端与倾角传感器的输入端连接,主控plc、触控屏和里程计量器配合,可以方便的对行驶里程进行设置。特别注意:设置里程前,确保里程归零,确保填写的里程正确无误。通过主控plc的整理与运算可以实时显示车体行驶的速度。
24.主控plc的一个输入端与拉式传感器9024的输出端连接,拉式传感器9024的输出端与驱动装置连接,驱动装置包括有:驱动模块、顶紧电机9025和顶轮,拉式传感器9024的输出端与驱动模块的输入端连接,驱动模块的输出端与顶紧电机9025的输入端连接,顶紧电机9025与顶轮连接,系统进入带电工作,按下按钮,顶轮指示灯变绿,通过驱动模块控制顶紧电机9025转动,顶紧电机9025控制顶轮运动,使顶轮与轨道自动顶紧,使车体与轨道之间没有间隙。
25.倾角传感器的型号为hda436t-can,通过触控屏对主控plc输入数据参数,主控plc对数据采集与处理模块进行参数设置,通过倾角传感器进行倾角修正设置,如果选择修正倾角,采集的断面为以大地为基准;如果选择不修正倾角,采集的断面为以轨面为基准车体包括车架1、行走装置、顶紧装置9,车架1上设置有底座支架4,底座支架4上安装有扫描支架5,扫描装置12安装在扫描支架5上;如图3所示,行走装置由主动组件以及从动组件组成,主动组件由安装在车架1前端且与待扫描道床所在钢轨表面贴合的主动轮6以及用于驱动主动轮6的动力驱动部件7组成,从动组件由安装在车架1后端的摆动梁2以及安装在摆动梁2两端的从动轮15组成,摆动梁2上设置有连接部,连接部铰接在车架1上并带动摆动梁2两端的从动轮15摆动,从动轮15与待扫描道床所在钢轨表面贴合;在车架上左右各安装一个铝合金材料的电控箱,左侧箱内安装伺服驱动模块;右侧箱内安装数据采集与处理模块,两部分相对独立,彻底屏蔽了电机脉冲对数据的干扰。车架中间设置有一个铝厚板支架,用来安装扫描仪立柱,内腔安装倾角传感器。
26.顶紧装置9由安装在车架1底部的用于顶紧待扫描道床所在一侧钢轨的第一顶紧组件901以及安装在车架1底部的用于调整并顶紧待扫描道床所在另一侧钢轨的第二顶紧组件902组成。
27.扫描支架5设置有用于保护扫描装置12的护罩13。主动轮6的数量为两个且均匀分
布在道床两侧的钢轨上,车架1上设置有用于安装主动轮6的安装座,两个的主动轮6同步动作。两个的主动轮6均设置有独立的动力驱动部件7。动力驱动部件7为伺服电机及与伺服电机相连的减速机。连接部位于摆动梁2的中部。
28.如图4所示,第一顶紧组件901由安装在车架1底部的第一支架9011以及安装在第一支架9011上的第一顶紧轮9012组成,第一顶紧轮9012与待扫描道床所在钢轨侧壁贴合。
29.第一顶紧组件901的数量与该第一顶紧组件901所顶紧的钢轨上的行走轮的数量相同,行走轮包括该钢轨上布置的主动轮6以及从动轮15。本发明中,主动轮6机从动轮15的数量均为2个,每条钢轨上均布置有主动轮6和从动轮15。
30.第二顶紧组件902由第二支架9021、螺纹伸缩杆9022、第二顶紧轮9023以及拉式传感器9024组成,第二支架9021安装在车架1的底部,拉式传感器9024的一端连接第二支架9021,拉式传感器9024的另一端与螺纹伸缩杆9022的固定端相连,螺纹伸缩杆9022上设置有用于驱动螺纹伸缩杆9022的顶紧电机9025,第二顶紧轮9023安装在螺纹伸缩杆9022的移动端,顶紧电机9025带动螺纹伸缩杆9022伸缩并使第二顶紧轮9023顶紧待扫描道床所钢轨。
31.特别注意:在一键启动小车前进前,一定要把顶紧开关打到自动,等顶紧后才可以启动,中途停车后再次启动,也需要重新开启下自动顶紧。扫描装置12在扫描完成后,小车到达设定距离后停止前进。点击软件系统控制区停止扫描,扫描装置12停止工作。
32.车架1两侧设置有用于搬运的提手10,提手10采用螺栓安装在车架1上,可以满足车体的搬运与挪动。车架1是一套铝合金框架,重量轻、防腐蚀。车体采用四轮形成三点支撑系统,确保扫描小车的车轮与轨道密贴,进一步提高了车体在钢轨上行走的稳定程度。
33.作为优选的,本发明在所述车体上设置有电池模块11,可以给扫描装置以及数据处理模块进行供电,具体的,所述电池模块采用2块锂电池采用外挂方式,可以拆下充电。同时,车体前端还设置有用于确定作业里程数的标尺14。工控机的输入可以采用设置在车体表面的控制面板8进行操作。
34.轨道道床断面全自动扫描系统的操作方法,具体操作步骤如下:s1:打开电源,按下电源按钮,开机前先检测急停按钮是否拍下,如果拍下,顺时针选择即可打开,使系统进入带电工作,通过触控屏向主控plc内设置小车参数:1.设置扫描方向,扫描角度:190
°
;2.扫描范围:1-80m;3.系统误差:
±
25mm(1-10m范围内);4.小车行驶速度1~5km/h,数据采集时,建议使用3~4km/h进行数据采集;5.设置小车行驶距离,设置里程前,确保里程归零,填写正确里程数;s2:设置完成后,按下顶紧轮伸出按钮,信号传输至主控plc内,主控plc向拉式传感器传输启动信号,拉式传感器向驱动模块传输启动信号,驱动模块控制顶紧电机运行,顶紧电机带动顶轮伸出,使顶轮与轨道自动顶紧;s3:准备完成后,通过触控屏点击开始扫描,通过主控plc对传感器输入启动信号,传感器控制扫描装置开始扫描,左上角扫描装置接收区显示当前扫描数据;s4:将遥控器的开始按钮打到开始挡位,确保遥控器急停按钮未拍下,再点击一键前进,遥控器对遥控接收器传输启动信息,遥控接收器对主控plc传输启动信息,主控plc对
伺服驱动模块传输启动信息,伺服驱动模块控制伺服驱动电机启动,伺服驱动电机控制驱动轮转动,此时小车开始行走,小车带动扫描装置行走,通过速度传感器实时监测小车行走速度,当速度较快时,速度传感器对减速机传输启动信息,减速机控制驱动轮的转速,从而保证小车的行驶速度处于设置的范围,在小车行走测量中,中途停止行走时,可再次点击一键前进按钮,小车停止前进。
35.扫描小车的扫描支架5在使用时用螺栓固定,收纳时需要拆下保存。扫描仪安装在扫描支架5上时,中心距轨道面1200mm,距道床面1300-1400mm,确保
±
4400mm宽的道床上表面在扫描有效区域内。可见,本发明满足了扫描车在钢轨上稳定行走的要求,小车行驶速度范围为1km/h—5km/h。
36.设备日常保养:1.设备定期检查螺丝是否松动,定期检查并打紧。
37.2.每次使用前对电池充满电。
38.3.顶轮等部件每次施工前,请仔细检查,如果磨损严重,请及时更换。
39.4.设备主要防水防潮处理。
40.5.每次施工前请清理干净扫面仪扫描区域,不得有油渍,灰尘等情况。
41.在此说明,本方案中“左”、“右”、“上”、“下”的方位概念均为相对方向,支撑板2在需要延展的方向上增加如实施例1的结构即可,在此不一一列举。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1