一种环卫车水量计算方法及环卫车与流程
本发明涉及一种环卫车水量计算方法及环卫车,属于车辆自动驾驶。
背景技术:
1、环卫车是一种用于城市市容整理和清洁的专用车辆,环卫车包括线控底盘和上装部分,线控底盘为环卫车的行驶部分,包括驱动、制动系统和转向系统等,上装部分安装在线控底盘上方,是环卫车的作业机构,主要实现清扫作业、喷水吸尘作业和垃圾转用等功能。
2、部分环卫车的上装部分包括水箱,在环卫车行驶和作业过程中需要对水箱的水量进行监控,尤其对于自动驾驶环卫车而言,需要在自动驾驶过程中,根据水箱中的水量计算整车质量,进而对环卫车的行驶速度进行规划,例如在加水结束后根据整车质量输出足够的扭矩以使车辆启动,或者在环卫车转弯时,根据整车质量调整车速。
3、现有技术中,环卫车普遍采用水位传感器,结合水箱容积,对水箱的水量进行估算,很难做到精确、动态地监控水箱水量。而且,常用的水位传感器依据是否接触介质进行划分,分为接触式和非接触式两种水位传感器。非接触式主要依据超声波原理,根据超声波测距,计算出水位高度,进而计算出水量。接触式水位传感器依据静压测量原理,通过测量压力,求出水位高度,进而计算出水量。计算公式为:
4、p=ρ×g×h+p0 (1)
5、式(1)中,p为水位传感器液面承受压力,ρ为液体密度,此处为水的密度,g为当地重力加速度,h为液位高度,p0为液面上的大气压。
6、在车辆静止时,采用水位传感器能够较为准确地计算出水箱的实时水量,但在车辆运动过程中,例如,车辆加速、减速或上下坡等运动场景中,水箱中的水不停的扰动,水位传感器就无法准确地检测出水箱的水量,车辆控制器无法得到精确的整车质量,就难以较好地对环卫车进行速度规划以实现自动驾驶。
技术实现思路
1、本发明的目的在于提供一种环卫车水量计算方法及环卫车,用于解决难以准确计算环卫车水箱内水量的问题。
2、为了实现上述目的,本发明提供了一种环卫车水量计算方法,包括如下步骤:
3、1)在环卫车加水结束后,获取环卫车水箱的当前水量;
4、2)在环卫车从加水结束到抵达作业地点的运行过程中,不再更新当前水量;
5、3)在环卫车抵达作业地点后的作业过程中,计算环卫车水箱的实时耗水量,根据当前水量和实时耗水量,更新当前水量。
6、现有技术的问题在于,采用水位传感器测量环卫车水箱内水量,由于行驶过程中水箱内的水不断晃动,导致测量出的水量不准确,本发明通过在加水结束后,获取水箱内加完水的当前水量,在环卫车运行过程中,一直采用加水结束后水箱内的当前水量,而不用水位传感器对水箱内的水量测量和更新,在环卫车执行作业任务过程中,实时获取水箱的耗水量,根据当前水量和耗水量,更新当前水量,得到更加准确的水箱内实时水量。
7、进一步地,在上述方法中,步骤1)中,获取环卫车水箱的加水量,根据加水量计算当前水量。
8、针对环卫车加水结束后水箱内的当前水量,提出一种获取方法,根据加入水箱内的加水量计算得到当前水量,计算简单。
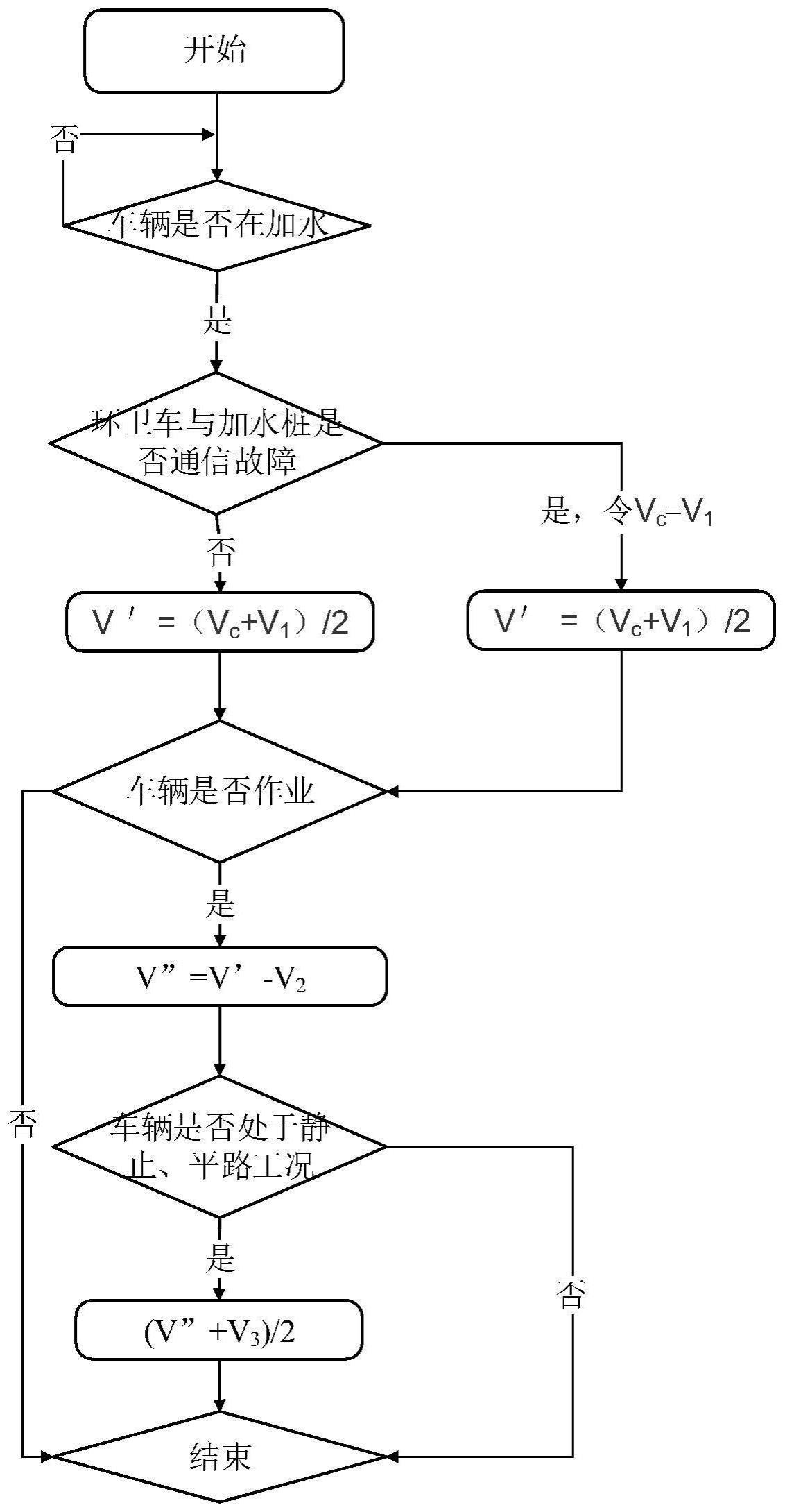
9、进一步地,在上述方法中,根据加水量计算当前水量的方法为:加水开始前通过水位传感器获取水箱的初始水量,并通过与加水桩通信获取加水量,将初始水量和加水量的和作为当前水量。
10、环卫车在加水站停车加水时,一般来说加水处的地面是能够保证水平且平整的,因此环卫车停稳准备加水时,水位传感器检测到的水箱水量的数值较为精确,同时通过加水桩获得的加水量也不会因环境因素有较大偏差,因此将加水前水位传感器测量得到的初始水量加上从加水桩得到的加水量,作为当前水量,计算简单,且较为准确。
11、进一步地,在上述方法中,根据加水量计算当前水量的方法为:在加水结束后,通过与加水桩通信获取加水量,并通过水位传感器获取加水后水量,根据加水量和加水后水量计算当前水量。
12、一般来说,环卫车通常会在水箱中的水耗尽后才会前往加水站加水,因此认为加水前水箱内的水量为0,加水结束后水箱内的水量应当为加水量,但同时为了消除误差,在加水结束后还通过水箱内的水位传感器检测加水后的水箱水量,根据加水量和传感器得到的水箱水量计算当前水量,以用于环卫车当前车重的计算,为环卫车的自动驾驶控制提供更加准确的车重。同时,这样计算得到的当前水量能够消除因加水处地面不平、环卫车因底盘结构使水箱不水平等原因导致的水位传感器获得的水量不准确的问题,并且能够在一定程度消除加水桩通信数据不准确带来的误差。
13、进一步地,在上述方法中,环卫车无作业任务后,不再更新当前水量,判断环卫车无作业任务的条件为:上装风机的转速小于第一设定转速,或者上装水泵的转速小于第二设定转速。
14、在环卫车无作业任务后的自动驾驶控制过程中,不再更新当前水量,采用环卫车的上装风机转速、上装水泵转速来判断环卫车是否为无作业任务状态,若环卫车的上装风机转速或上装水泵转速小于设定值,则说明上装系统的作业机构未开启,此时认为环卫车无作业任务。采用风机转速、水泵转速判断环卫车是否无作业任务,易于获取数据,且判断准确。
15、进一步地,在上述方法中,步骤3)中,通过获取环卫车执行作业任务的作业时间和对应作业时间内水箱的实时出水流量,根据作业时间和实时出水流量计算实时耗水量。
16、环卫车在执行作业任务时,仍处于自动驾驶控制过程中,因此根据作业时间和对应作业时间内水箱的实时出水流量,计算水箱的实时耗水量,进而更新水箱的当前水量,起到了实时更新车重的作用,便于提高自动驾驶控制的准确性。
17、进一步地,在上述方法中,在环卫车的当前车速小于设定车速且环卫车当前所在路段的坡度处于设定坡度范围时,通过水位传感器获取水箱内的测量水量,根据测量水量校正当前水量。
18、在环卫车当前车速小于设定值,认为环卫车处于停车状态,且在环卫车当前所在路段的坡度处于设定坡度范围时,认为环卫车处在平路路况,此时通过水位传感器测量水箱内水量,并根据测量得到的水量对当前水量进行校正,可以提高当前水量的准确性,进而得到更加准确的车重,提高自动驾驶控制的准确性。
19、进一步地,在上述方法中,所述设定坡度范围为-3%~3%。
20、环卫车在行驶时,很难做到行驶在坡度为0的路段,而坡度处于-3%~3%时,通常认为车辆处于平路路况,因此采用-3%~3%作为设定坡度范围,此时也可以通过水位传感器准确测量水箱内水量,进而更新当前水量,根据当前水量更新出的当前车重,不会对自动驾驶控制过程造成太大影响。
21、进一步地,在上述方法中,根据当前水量计算环卫车的实际车重,根据实际车重对环卫车进行自动驾驶控制。
22、根据当前水量计算环卫车的实际车重,进而根据实际车重制定自动驾驶控制策略,可以防止因车重不准确,导致环卫车在起步或转弯时,驱动电机输出过大或过小的扭矩,使车辆行驶不平衡,影响环卫车安全的问题发生。
23、本发明还提供一种环卫车,包括控制器,所述控制器执行指令实现上述的环卫车水量计算方法。
- 还没有人留言评论。精彩留言会获得点赞!