一种电动汽车的制动控制方法及电动汽车与流程
本发明涉及一种电动汽车的制动控制方法及电动汽车,属于电动汽车制动控制。
背景技术:
1、随着新能源技术的不断发展,电动汽车或混合动力汽车以其起步快、零排放、噪声小、能耗低等诸多优点,逐渐受到市场的认可与消费者的青睐。纯电动客车因其系统架构简单和效率高,以及使用能源清洁等优势,已成为客车系统的发展趋势。
2、传统的燃油汽车在进行减速时,由车轮制动器向车轮施加制动力,将车辆运动的动能通过刹车的方式变成热能释放到空气中,实现车辆的减速,而对于电动汽车或混合动力汽车而言,这种由于刹车浪费掉的动能可以通过滑行能量回收技术转变为电能重新储存在电动汽车的动力电池中,从而能够提高能量的利用率。
3、目前乘用车主机厂开发的单踏板功能滑行回收扭矩为定值,无法根据坡度进行自适应制动,造成不同坡度下滑行减速度不一致,影响踏板松踩的拖拽感,尤其是单踏板模式下难以向驾驶员提供正确的车辆减速感,从而影响车辆的安全行驶,降低了用户的驾驶体验。
技术实现思路
1、本发明的目的在于提供一种电动汽车的制动控制方法及电动汽车,用于解决现有电动汽车难以向驾驶用户提供良好驾驶体验的问题。
2、为了实现上述目的,本发明提供了一种电动汽车的制动控制方法,包括如下步骤:
3、1)获取电动汽车的当前车速和踏板的当前踏板开度,根据预先获得的踏板开度、车速与目标减速度之间的对应关系,得到与当前车速和当前踏板开度对应的目标减速度值,并根据当前车速计算滑行阻力;
4、2)获取电动汽车当前所在路段的坡度,根据坡度计算坡道阻力;
5、3)根据滑行阻力、坡道阻力和目标减速度值计算请求制动扭矩;
6、4)控制驱动电机输出请求制动扭矩。
7、本发明的电动汽车的制动控制方法,通过获取电动汽车的当前车速和当前踏板的开度,根据预先获取的踏板开度、车速与目标减速度之间的对应关系,提取出对应当前车速和当前踏板开度的目标减速度,将目标减速度作为制动控制的控制目标,并根据当前车速计算车辆滑行阻力;还获取电动汽车当前所在路段的坡度,根据坡度计算坡道阻力;然后根据车辆滑行阻力、坡道阻力和目标减速度值,计算请求制动扭矩,控制驱动电机输出请求制动扭矩。采用本发明,通过将目标减速度作为制动控制目标,并根据所在路段的坡度自适应计算请求驱动电机输出的请求制动扭矩,驱动电机采用请求制动扭矩输出,优化了驾驶感受。
8、进一步地,在上述方法中,所述踏板具有单踏板功能,步骤s1中,若当前踏板开度小于设定开度,则根据预先获得的踏板开度、车速与目标减速度之间的对应关系,得到与当前车速和当前踏板开度对应的目标减速度值;
9、所述具有单踏板功能的踏板在踏板开度大于设定开度时,输出加速指令,在踏板开度小于设定开度时,输出动能回收指令。
10、电动汽车采用具有单踏板功能的踏板进行制动控制,在踏板的当前踏板开度大于设定开度时,输出加速指令,在踏板开度小于设定开度时,输出动能回收指令,并根据预先获得的踏板开度、车速与目标减速度之间的对应关系,得到与当前车速和当前踏板开度对应的目标减速度值,以目标减速度作为制动控制目标,不仅可以满足驾驶员的制动需求,而且能够提供良好的驾驶感受,并减少制动时的电耗。
11、进一步地,在上述方法中,步骤4)中,在控制驱动电机输出请求制动扭矩时,还获取整车回收扭矩限值;若请求制动扭矩大于整车回收扭矩限值,则计算请求制动扭矩与整车回收扭矩限值的差值,控制驱动电机根据该差值进行制动补偿。
12、在控制驱动电机输出请求制动扭矩时,考虑到单踏板施加的制动力矩无法达到原始扭矩,因此还通过获取整车回收扭矩限值,根据请求制动扭矩与整车回收扭矩限值的差值,进行制动补偿。
13、进一步地,在上述方法中,通过如下步骤获取整车回收扭矩限值:
14、1)获取动力电池的充电功率限值pbattchrg、驱动电机当前转速n和驱动电机运行效率ηtm,结合传动比i0,通过如下公式计算动力电池充电功率扭矩限值tbattchrg:
15、
16、2)获取驱动电机回收最大扭矩限值tmotmax,将动力电池充电功率扭矩限值tbattchrg与驱动电机回收最大扭矩限值tmotmax之间的较小值作为整车回收扭矩限值。
17、通过获取动力电池的充电功率限值pbattchrg、驱动电机当前转速n和驱动电机运行效率ηtm,计算动力电池充电功率扭矩限值,然后根据获取的驱动电机回收最大扭矩限值,将动力电池的充电功率扭矩限值与驱动电机回收最大扭矩限值之间的较小值作为整车回收扭矩限值,计算简单,易于实现。
18、进一步地,在上述方法中,步骤3)中,采用如下公式计算请求制动扭矩:
19、
20、式中,topd为请求制动扭矩,fopd为整车合力,fstope为坡道阻力,fresistance为车辆滑行阻力,r为车轮半径,i0为驱动电机与车轮的传动比。
21、提出一种具体的计算请求制动扭矩的公式,便于实施。
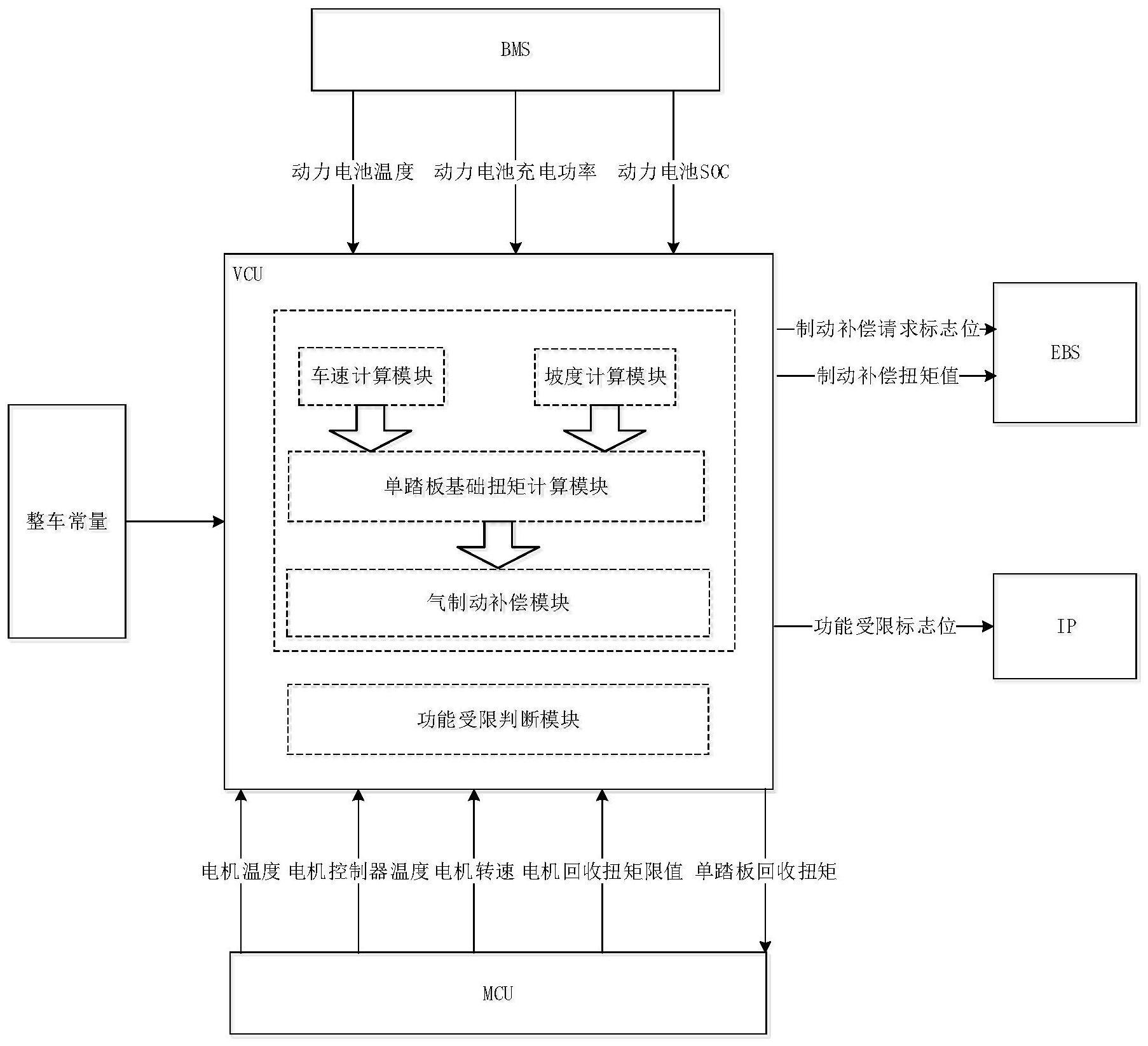
22、进一步地,在上述方法中,还包括在电动汽车制动控制时对能量回收能力判断的步骤,若动力电池充电功率限值小于设定功率,或者动力电池温度大于第一设定温度,或者动力电池soc大于设定阈值,或者驱动电机温度大于第二设定温度,或者驱动电机控制器温度大于第三设定温度,或者整车控制器与电池管理系统或驱动电机控制器之间存在通信故障,则认为能量回收能力弱。
23、在电动汽车的制动控制过程中,通过动力电池动力电池充电功率限值、动力电池温度、动力电池soc、驱动电机温度、驱动电机控制器mcu的温度和整车控制器vcu是否与电池管理系统bms或驱动电机控制器mcu发生通信故障,对制动控制过程中能量回收的能力进行判断,以便于在能量回收能力较弱的时候向驾驶员提示。
24、进一步地,在上述方法中,在能量回收能力弱的时候,通过符号片进行显示,以向驾驶员报警。
25、通过符号片,在能量回收能力较弱的时候向驾驶员提示,便于观察,方便驾驶员实时了解制动回收功能的运行情况,避免在回收功能受限时误使用。
26、本发明还提供一种电动汽车,包括整车控制器,所述整车控制器执行指令实现上述的电动汽车的制动控制方法。
技术特征:
1.一种电动汽车的制动控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的电动汽车的制动控制方法,其特征在于,所述踏板具有单踏板功能,步骤s1中,若当前踏板开度小于设定开度,则根据预先获得的踏板开度、车速与目标减速度之间的对应关系,得到与当前车速和当前踏板开度对应的目标减速度值;
3.根据权利要求1或2所述的电动汽车的制动控制方法,其特征在于,步骤4)中,在控制驱动电机输出请求制动扭矩时,还获取整车回收扭矩限值;若请求制动扭矩大于整车回收扭矩限值,则计算请求制动扭矩与整车回收扭矩限值的差值,控制驱动电机根据该差值进行制动补偿。
4.根据权利要求3所述的电动汽车的制动控制方法,其特征在于,通过如下步骤获取整车回收扭矩限值:
5.根据权利要求1所述的电动汽车的制动控制方法,其特征在于,步骤3)中,采用如下公式计算请求制动扭矩:
6.根据权利要求1所述的电动汽车的制动控制方法,其特征在于,还包括在电动汽车制动控制时对能量回收能力判断的步骤,若动力电池充电功率限值小于设定功率,或者动力电池温度大于第一设定温度,或者动力电池soc大于设定阈值,或者驱动电机温度大于第二设定温度,或者驱动电机控制器温度大于第三设定温度,或者整车控制器与电池管理系统或驱动电机控制器之间存在通信故障,则认为能量回收能力弱。
7.根据权利要求6所述的电动汽车的制动控制方法,其特征在于,在能量回收能力弱的时候,通过符号片进行显示,以向驾驶员报警。
8.一种电动汽车,其特征在于,包括整车控制器,所述整车控制器执行指令实现权利要求1-7任一项所述的电动汽车的制动控制方法。
技术总结
本发明提供了一种电动汽车的制动控制方法及电动汽车,属于电动汽车制动控制技术领域。通过获取电动汽车的当前车速和当前踏板的开度,根据预先获取的踏板开度、车速与目标减速度之间的对应关系,提取出对应当前车速和当前踏板开度的目标减速度,将目标减速度作为制动控制的控制目标,并根据当前车速计算车辆滑行阻力;还获取电动汽车当前所在路段的坡度,根据坡度计算坡道阻力;然后根据车辆滑行阻力、坡道阻力和目标减速度值,计算请求制动扭矩,控制驱动电机输出请求制动扭矩。采用本发明,通过将目标减速度作为制动控制目标,并根据所在路段的坡度自适应计算请求驱动电机输出的请求制动扭矩,驱动电机采用请求制动扭矩输出,优化了驾驶感受。
技术研发人员:丁鼎,黄琨,夏天星,李世玉,孙中博,郭潇然,郭进山
受保护的技术使用者:宇通客车股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!