自适应巡航控制方法及系统与流程
本发明涉及车辆安全控制,尤其涉及一种自适应巡航控制方法及自适应巡航控制系统。
背景技术:
1、自适应巡航控制(adaptive cruise control,acc)系统通过感知系统(目前多用车载毫米波雷达)感知前方行驶环境,控制器通过运算给出恰当的控制量,对动力装置节气门和制动系统进行控制,自动调整车速和车距,实现纵向驾驶操作的自动化。
2、受限于当前的感知系统的设计水平,在高级辅助驾驶功能开启的过程中,发生与高级辅助驾驶功能相关的误触发(例如、电子控制制动辅助(electronic brake assist,eba)功能的误触发)难以避免。然而,在目前的系统设计时,仅考虑了单点失效(单车失效)的情况,而对于多点失效(多辆开启acc功能的车辆共同行驶)的情况则考虑不足。随着近年来高级辅助驾驶功能的不断普及和发展,道路上带有高级辅助驾驶功能的车辆越来越多,在多辆车辆均开启了acc功能的情况下,前车由于误触发导致的紧急刹车可能会影响到后车,从而产生连锁反应,增加交通事故的风险。
技术实现思路
1、本发明是为了解决上述问题而完成的,其目的在于提供一种自适应巡航控制方法及自适应巡航控制系统,该自适应巡航控制方法及自适应巡航控制系统充分考虑同样开启acc功能的前车的失效可能对车辆带来的影响,降低道路整体的风险。
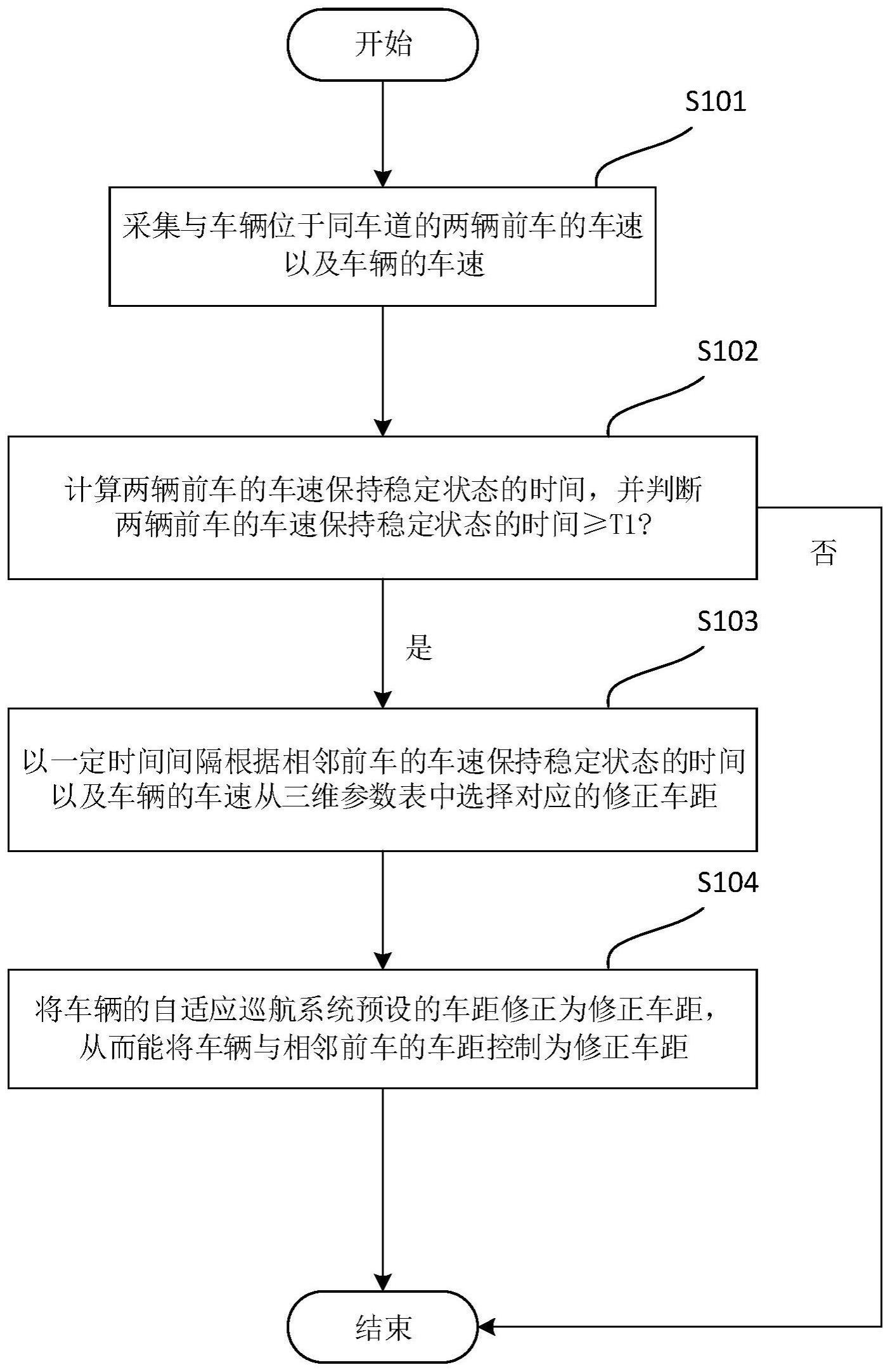
2、根据本发明的一个方面,提供一种自适应巡航控制方法,包括:采集步骤,采集与车辆位于同车道的至少两辆前车的车速以及所述车辆的车速;判断步骤,计算所述至少两辆前车的车速保持稳定状态的时间,并判断所述至少两辆前车的车速保持稳定状态的时间是否大于等于第一设定时间,其中,车速保持稳定状态是指车速基本维持于某一车速,车速偏差值小于第一阈值;以及修正步骤,在所述至少两辆前车的车速保持稳定状态的时间大于等于第一设定时间的情况下,以一定时间间隔对所述车辆的自适应巡航系统预设的车距进行修正,将其修正为修正车距,从而能将所述车辆与相邻前车的车距控制为修正车距。
3、优选地,所述修正步骤中,根据预先存储于所述车辆的三维参数表或三维特征曲线来设定所述修正车距,该三维参数表由三个参数组成,分别为相邻前车的车速保持稳定状态的时间、车辆的车速、修正车距,该三维特征曲线的三个轴分别表示相邻前车的车速保持稳定状态的时间、车辆的车速、修正车距。
4、优选地,所述修正步骤中,以一定时间间隔根据所述相邻前车的车速保持稳定状态的时间以及所述车辆的车速从所述三维参数表或所述三维特征曲线选择对应的修正车距。
5、优选地,所述采集步骤中,利用安装于所述车辆的传感器装置来采集所述至少两辆前车的车速、所述车辆的车速。
6、优选地,所述采集步骤中,通过车对x通信系统来采集所述至少两辆前车的车速、所述车辆的车速。
7、优选地,所述某一车速是大于等于80kph的车速。
8、优选地,所述第一设定时间设定为60秒。
9、优选地,所述第一阈值设定为5kph。
10、优选地,所述一定时间间隔设定为20秒。
11、根据本发明的另一个方面,提供一种自适应巡航控制系统,包括:采集模块,采集与车辆位于同车道的至少两辆前车的车速以及所述车辆的车速;判断模块,计算所述至少两辆前车的车速保持稳定状态的时间,并判断所述至少两辆前车的车速保持稳定状态的时间是否大于等于第一设定时间,其中,车速保持稳定状态是指车速基本维持于某一车速,车速偏差值小于第一阈值;以及修正模块,在所述至少两辆前车的车速保持稳定状态的时间达到第一设定时间的情况下,该修正模块以一定时间间隔对所述车辆的自适应巡航系统预设的车距进行修正,将其修正为修正车距,从而能将所述车辆与相邻前车的车距控制为修正车距。
12、优选地,所述修正模块中,根据预先存储于所述车辆的三维参数表来设定所述修正车距,该三维参数表由三个参数组成,分别为至少两辆前车中的相邻前车的车速保持稳定状态的时间、车辆的车速、修正车距。
13、优选地,所述修正模块中,以一定时间间隔从所述三维参数表中根据所述相邻前车的车速保持稳定状态的时间以及所述车辆的车速选择对应的修正车距。
14、根据本发明,通过优化车辆之间的间距,能够降低道路整体风险。
技术特征:
1.一种自适应巡航控制方法,其特征在于,包括:
2.如权利要求1所述的自适应巡航控制方法,其特征在于,
3.如权利要求2所述的自适应巡航控制方法,其特征在于,
4.如权利要求1至3的任一项所述的自适应巡航控制方法,其特征在于,
5.如权利要求1至3的任一项所述的自适应巡航控制方法,其特征在于,
6.如权利要求1至3的任一项所述的自适应巡航控制方法,其特征在于,
7.如权利要求1至3的任一项所述的自适应巡航控制方法,其特征在于,
8.如权利要求1至3的任一项所述的自适应巡航控制方法,其特征在于,
9.如权利要求1至3的任一项所述的自适应巡航控制方法,其特征在于,
10.一种自适应巡航控制系统,其特征在于,包括:
11.如权利要求10所述的自适应巡航控制系统,其特征在于,
12.如权利要求11所述的自适应巡航控制系统,其特征在于,
技术总结
本发明涉及一种自适应巡航控制方法,包括:采集与车辆位于同车道的至少两辆前车的车速以及车辆的车速的采集步骤;计算两辆前车的车速保持稳定状态的时间,并判断两辆前车的车速保持稳定状态的时间是否大于等于第一设定时间的判断步骤,其中,车速保持稳定状态是指车速基本维持于某一车速,车速偏差值小于第一阈值;以及在两辆前车的车速保持稳定状态的时间大于等于第一设定时间的情况下,以一定时间间隔对车辆的自适应巡航系统预设的车距进行修正,将其修正为修正车距,从而能将车辆与相邻前车的车距控制为修正车距的修正步骤。本发明还涉及一种自适应巡航控制系统。
技术研发人员:孙砚田
受保护的技术使用者:大陆智行科技(上海)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!