一种全地形除雪及庭院清扫机器人
1.本实用新型属于清扫机器人技术领域,具体是一种全地形除雪及庭院清扫机器人。
背景技术:
2.该全地形除雪及庭院清扫机器人,是一种用于地面积雪清理的一种庭院清扫机器人,利用该庭院清扫机器人可以完成对积雪的清扫及收集操作,从而降低了使用者的操作步骤。
3.专利文件cn206477508u公开的一种屋面扫雪机器人,其结构包括导轨、主控车体和推雪小车。所述主控车体上设置有第一推板,所述第一推板朝所述主控车体下方延伸;所述主控车体设置有第一驱动装置和第一车轮,所述第一驱动装置驱动所述第一车轮旋转;所述第一车轮支撑在所述导轨上并可沿所述导轨移动地设置,所述第一推板用于推移所述主控车体下方的积雪;推雪小车,所述推雪小车设置有第二驱动装置和第二车轮;所述第二驱动装置驱动所述第二车轮旋转;所述第二驱动装置通过驱动所述第二车轮旋转可使所述推雪小车移动,与本实用新型相比,其使用效果较差。
4.但现有的庭院清扫机器人在使用时还存在一定的弊端,传统庭院清扫机器人的扫雪效果较差,传统庭院清扫机器人不具有翻斗结构,受积雪体积影响,使得传统庭院清扫机器人在积雪清理过程中,极易出现满载现象,降低了传统庭院清扫机器人的使用效果;其次传统庭院清扫机器人受地形影响,容易出现侧翻及卡死现象,需要使用者对庭院清扫机器人进行手动复位操作,降低了庭院清扫机器人使用时的稳定性,给使用者带来一定的不便。
技术实现要素:
5.本实用新型的目的在于解决传统庭院清扫机器人的扫雪效果较差,传统庭院清扫机器人不具有翻斗结构,受积雪体积影响,使得传统庭院清扫机器人在积雪清理过程中,极易出现满载现象,降低了传统庭院清扫机器人的使用效果;其次传统庭院清扫机器人受地形影响,容易出现侧翻及卡死现象,需要使用者对庭院清扫机器人进行手动复位操作,降低了庭院清扫机器人使用时的稳定性,而提供一种全地形除雪及庭院清扫机器人。
6.本实用新型的目的可以通过以下技术方案实现:
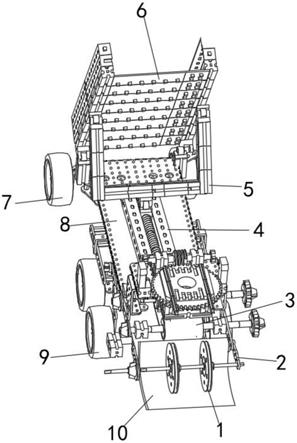
7.一种全地形除雪及庭院清扫机器人,所述自适应底盘活动安装在固定车架的底部,所述固定车架的一端活动安装有铲斗,所述自适应底盘和固定车架之间通过平衡架活动连接,所述固定车架的一端靠近铲斗的一侧活动安装有旋转清扫头,所述固定车架和旋转清扫头之间设置有传送带,所述固定车架的上端外表面固定安装有固定底座,且固定底座的内侧中部位置活动安装有丝杆,所述固定底座的上方活动安装有车厢翻斗,所述丝杆的侧边外表面活动套接有对接螺套,所述固定底座和车厢翻斗之间设有翻料架。
8.作为本实用新型的进一步技术方案,所述自适应底盘包括转轴和平衡脚轮,所述平衡脚轮安装在自适应底盘的一端,且平衡脚轮的数量为两组,所述自适应底盘和平衡架
之间通过转轴活动连接。
9.作为本实用新型的进一步技术方案,所述自适应底盘的另一端活动安装有转向轮,自适应底盘的上部活动安装有方向舵,方向舵和转向轮之间通过传动杆活动连接。
10.作为本实用新型的进一步技术方案,所述旋转清扫头的两端均安装有旋转架,且旋转清扫头和旋转架之间设有转杆,所述旋转清扫头和固定车架之间通过旋转架活动连接。
11.作为本实用新型的进一步技术方案,所述对接螺套的一端活动安装在翻料架的下端中部位置,铲斗的侧边外表面为弧形结构。
12.本实用新型的有益效果:本实用新型通过设置平衡架和自适应底盘,在该全地形除雪及庭院清扫机器人行驶时,利用自适应底盘配合平衡架可以调节平衡脚轮的使用位置,使得平衡脚轮可以根据地形结构做对应的调节操作,通过平衡架和自适应底盘的设置,配合两组平衡脚轮的应用,使得该清扫机器人具有全地形六轮被动适应调节结构,可以使得清扫机器人整体能在多种复杂的地形上工作,以及能在一定的坡度上运行,提升清扫机器人使用时的稳定性;
13.通过设置旋转清扫头和车厢翻斗,在该全地形除雪及庭院清扫机器人使用时,使用者可以利用旋转架调节旋转清扫头和铲斗的角度,使得铲斗与积雪接触,配合清扫机器人的移动,利用电机驱动旋转清扫头转动,使得旋转清扫头配合铲斗将积雪输送至传送带,利用传送带的运转将积雪排入至车厢翻斗内,利用车厢翻斗的设置,可以有效增加该清扫机器人的积雪储存量,同时利用电机驱动丝杆转动,使得丝杆表面的对接螺套带动翻料架,使得翻料架立起,从而将车厢翻斗顶起,完成对车厢翻斗的卸料操作,利用旋转清扫头和车厢翻斗的设置,可以提升该清扫机器人的积雪清理效果。
附图说明
14.为了便于本领域技术人员理解,下面结合附图对本实用新型作进一步的说明。
15.图1是本实用新型的整体结构示意图;
16.图2是本实用新型的侧视图;
17.图3是本实用新型中自适应底盘的整体结构图;
18.图4是本实用新型中车厢翻斗的整体结构图。
19.图中:1、旋转清扫头;2、旋转架;3、传送带;4、固定底座;5、翻料架;6、车厢翻斗;7、转向轮;8、固定车架;9、平衡脚轮;10、铲斗;11、对接螺套;12、自适应底盘;13、传动杆;14、方向舵;15、平衡架;16、丝杆。
具体实施方式
20.下面将结合实施例对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
21.如图1
‑
4所示,一种全地形除雪及庭院清扫机器人,自适应底盘12活动安装在固定车架8的底部,固定车架8的一端活动安装有铲斗10,铲斗10对积雪起到辅助清理作用,自适
应底盘12和固定车架8之间通过平衡架15活动连接,固定车架8的一端靠近铲斗10的一侧活动安装有旋转清扫头1,固定车架8和旋转清扫头1之间设置有传送带3,固定车架8的上端外表面固定安装有固定底座4,且固定底座4的内侧中部位置活动安装有丝杆16,固定底座4的上方活动安装有车厢翻斗6,丝杆16的侧边外表面活动套接有对接螺套11,固定底座4和车厢翻斗6之间设有翻料架5。
22.自适应底盘12包括转轴和平衡脚轮9,平衡脚轮9可以根据地形结构做对应的调节操作,平衡脚轮9安装在自适应底盘12的一端,且平衡脚轮9的数量为两组,自适应底盘12和平衡架15之间通过转轴活动连接。
23.自适应底盘12的另一端活动安装有转向轮7,自适应底盘12的上部活动安装有方向舵14,方向舵14和转向轮7之间通过传动杆13活动连接,方向舵14配合传动杆13可以调节转向轮7的角度。
24.旋转清扫头1的两端均安装有旋转架2,且旋转清扫头1和旋转架2之间设有转杆,旋转清扫头1和固定车架8之间通过旋转架2活动连接。
25.对接螺套11的一端活动安装在翻料架5的下端中部位置,铲斗10的侧边外表面为弧形结构。
26.一种全地形除雪及庭院清扫机器人,在使用时,通过设置平衡架15和自适应底盘12,在该全地形除雪及庭院清扫机器人行驶时,利用自适应底盘12配合平衡架15可以调节平衡脚轮9的使用位置,使得平衡脚轮9可以根据地形结构做对应的调节操作,通过平衡架15和自适应底盘12的设置,配合两组平衡脚轮9的应用,使得该清扫机器人具有全地形六轮被动适应调节结构,可以使得清扫机器人整体能在多种复杂的地形上工作,以及能在一定的坡度上运行,提升清扫机器人使用时的稳定性;
27.通过设置旋转清扫头1和车厢翻斗6,在该全地形除雪及庭院清扫机器人使用时,使用者可以利用旋转架2调节旋转清扫头1和铲斗10的角度,使得铲斗10与积雪接触,配合清扫机器人的移动,利用电机驱动旋转清扫头1转动,使得旋转清扫头1配合铲斗10将积雪输送至传送带3,利用传送带3的运转将积雪排入至车厢翻斗6内,利用车厢翻斗6的设置,可以有效增加该清扫机器人的积雪储存量,同时利用电机驱动丝杆16转动,使得丝杆16表面的对接螺套11带动翻料架5,使得翻料架5立起,从而将车厢翻斗6顶起,完成对车厢翻斗6的卸料操作,利用旋转清扫头1和车厢翻斗6的设置,可以提升该清扫机器人的积雪清理效果。
28.以上内容仅仅是对本实用新型结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1