一种跨座式单轨架桥机支撑方法和装置与流程
1.本发明涉及轨道交通技术领域,具体为一种跨座式单轨架桥机支撑方法和装置。
背景技术:
2.跨座式单轨交通是轨道交通制式的一种,具有适用性强、转弯半径小、爬坡能力强等特点,能更好适应复杂的地形地貌环境,特别适合于地形复杂的自然景观旅游景区的观光游览车辆。
3.在常规的架桥机设计中,一般直接将架桥机承载结构直接固定到已铺设完成的桥墩立柱和轨道上,然而由于自然景观景区的地形复杂性,其路线设计时往往会有比较大的坡度和比较小的半径弯道,甚至会出现三维曲线结构的轨道梁,使得架桥机的倾覆量超过了正常吊装系统的使用范围,无法完成跨坐式单轨轨道的架设工作。因此,需要为跨座式单轨架桥机设计一种支撑装置,能够在大坡度、曲线轨道的条件下保证架桥机的水平度,为跨座式单轨架桥施工提供基础。
技术实现要素:
4.鉴于现有技术中所存在的问题,本发明公开了一种跨座式单轨架桥机支撑装置,采用的技术方案是,包括架桥机,所述架桥机位于轨道梁上,所述轨道梁的两端架设在立柱的顶面上,所述轨道梁与立柱连接,所述架桥机上设有承载结构、行走系统、吊装系统,所述承载结构位于所述架桥机的前端,所述行走系统还包括主行走机构、副行走机构,所述主行走机构位于所述承载结构的底部,所述主行走机构的后端连接所述副行走机构,所述支撑装置还包括前部支撑部件、后部支撑部件,所述前部支撑部件还包括前支撑部件,所述前支撑部件有两组,所述后部支撑部件上设有夹紧机构,所述前支撑部件均可独立调整高度,所述支撑装置采用三点确定一个平面的原理进行水平度控制。
5.作为本发明的一种优选技术方案,所述承载结构的前部两侧对称设有所述前支撑部件,所述前支撑部件通过可拆卸连接结构连接所述立柱,所述承载结构的后端通过所述后部支撑部件连接所述副行走机构,当所述架桥机需要移动时,所述前支撑部件与所述后部支撑部件收缩起来与所述轨道梁、所述立柱脱离接触,当所述架桥机到达指定位置需要进行架桥工作时,放下所述前支撑部件与所述后部支撑部件,将支撑部件分别固定连接到所述立柱和所述轨道梁上。
6.作为本发明的一种优选技术方案,所述前支撑部件可采用液压支腿,所述前支撑部件的固定端安装在所述承载结构上,活动端在吊装状态时可用虎口夹、固定螺栓与所述可拆卸连接结构进行刚性连接。
7.作为本发明的一种优选技术方案,所述可拆卸连接结构包括主承力结构、连接螺栓和连接销轴,所述主承力结构还包括主承力结构水平板、主承力结构的竖向板,所述主承力结构水平板通过所述连接螺栓连接所述立柱的顶面,所述主承力结构的竖向板通过所述连接销轴连接所述立柱的筋板。
8.作为本发明的一种优选技术方案,所述主承力结构水平板和主承力结构的竖向板上合理打孔实现轻量化。
9.作为本发明的一种优选技术方案,所述后部支撑部件包括主体支撑结构、主驱动元件、夹紧臂、驱动元件,所述主体支撑结构采用桁架结构进行设计,所述夹紧臂与所述主体支撑结构相铰接,所述主体支撑结构与所述夹紧臂之间设有所述驱动元件,所述夹紧臂与所述轨道梁的底面留有间隙,所述主驱动元件用于驱动所述后部支撑部件整体抬升,并使所述夹紧臂压紧所述轨道梁。
10.作为本发明的一种优选技术方案,所述主驱动元件可采用液压千斤顶实现驱动后部支撑部件整体抬升,所述驱动元件可采用直线电缸控制所述夹紧臂的位置。
11.基于一种跨座式单轨架桥机支撑装置,本发明公开了一种跨座式单轨架桥机支撑方法,采用的技术方案是,当所述架桥机行走时,脱开所述支撑装置与所述立柱、所述轨道梁之间的连接,同时使所述行走系统落到所述轨道梁实现正常行驶;当需要架桥时,放下所述后部支撑部件的所述夹紧臂,采用所述主驱动元件驱动所述后部支撑部件整体抬升,并保持固定高度,通过调整两个所述前支撑部件的伸长量抬升所述承载机构,支撑整个所述架桥机的同时,采用三点确定一个平面的原理进行对所述架桥机的水平度进行调节,以保证吊装工作的完成。
12.本发明的有益效果:
13.一、运用本发明的跨座式单轨架桥机的支撑装置和方法,前部支撑部件直接连接固定到高架轨道的立柱上,以立柱为主要承载部件,后部支撑部件固定连接到轨道梁上,以轨道梁为次要承载部件,受力条件良好,承载能力强;
14.二、运用本发明的跨座式单轨架桥机的支撑装置和方法,后部支撑部件抬升到一定高度,两个前部支撑部件可以独立调节伸长量,采用三点确定一个平面的原理使架桥机保持比较好的水平度,确保了架桥机吊装系统的性能;
15.三、运用本发明的的跨座式单轨架桥机的支撑装置和方法,支撑部件的驱动装置在实现水平度调整的同时,对行走系统与轨道梁的相对位置进行调整,减少了驱动元件数量,整体机构更紧凑,控制更简单,操作更方便。
附图说明
16.下面将结合附图对本发明的技术方案进行清楚、完整地描述。在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
17.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍;在所有附图中,类似的元件或部分一般由类似的附图标记标识;附图中,各元件或部分并不一定按照实际的比例绘制。
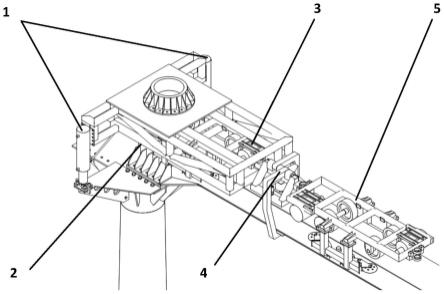
18.图1为本发明结构示意图;
19.图2为本发明后部支撑部件结构示意图;
20.图3为本发明前部支撑部件结构示意图;
21.图4为本发明前支撑部件安装结构示意图;
22.图5为本发明主承力结构示意图;
23.图6为本发明行走状态示意图;
24.图7为本发明吊装状态示意图。
25.图中:1、前部支撑部件;101、前支撑部件;102、虎口夹;103、固定螺栓;2、承载结构;3、主行走机构;4、后部支撑部件;401、夹紧臂;402、驱动元件;403、主体支撑结构;404、主驱动元件;5、副行走机构;6、轨道梁;7、主承力结构;701、连接螺栓;702、主承力结构水平板;703、主承力结构的竖向板;704、连接销轴;8、立柱。
具体实施方式
26.实施例1
27.如图1至图7所示,本发明公开了一种跨座式单轨架桥机支撑装置,采用的技术方案是,包括架桥机,架桥机位于轨道梁6上,轨道梁6的两端架设在立柱8的顶面上,轨道梁6与立柱8连接,架桥机上设有承载结构2、行走系统、吊装系统,承载结构2位于架桥机的前端,行走系统还包括主行走机构3、副行走机构5,主行走机构3位于承载结构2的底部,主行走机构3的后端连接副行走机构5,支撑装置还包括前部支撑部件1、后部支撑部件4,前部支撑部件1还包括前支撑部件101,前支撑部件101有两组,后部支撑部件4上设有夹紧机构,前支撑部件101均可独立调整高度,支撑装置采用三点确定一个平面的原理进行水平度控制。
28.作为本发明的一种优选技术方案,承载结构2的前部两侧对称设有前支撑部件101,前支撑部件101通过可拆卸连接结构连接立柱8,承载结构2的后端通过后部支撑部件4连接副行走机构5,当架桥机需要移动时,前支撑部件101与后部支撑部件4收缩起来与轨道梁6、立柱8脱离接触,当架桥机到达指定位置需要进行架桥工作时,放下前支撑部件101与后部支撑部件4,将支撑部件分别固定连接到立柱8和轨道梁6上。
29.作为本发明的一种优选技术方案,承载结构2可采用高强度方管焊接制造。
30.作为本发明的一种优选技术方案,前支撑部件101可采用液压支腿,前支撑部件101的固定端安装在承载结构2上,活动端在吊装状态时可用虎口夹102、固定螺栓103与可拆卸连接结构进行刚性连接。
31.作为本发明的一种优选技术方案,可拆卸连接结构包括主承力结构7、连接螺栓701和连接销轴704,主承力结构7还包括主承力结构水平板702、主承力结构的竖向板703,主承力结构水平板702通过连接螺栓701连接立柱8的顶面,主承力结构的竖向板703通过连接销轴704连接立柱8的筋板。
32.作为本发明的一种优选技术方案,主承力结构水平板702和主承力结构的竖向板703上合理打孔实现轻量化。
33.作为本发明的一种优选技术方案,后部支撑部件4包括主体支撑结构403、主驱动元件404、夹紧臂401、驱动元件402,主体支撑结构403采用桁架结构进行设计,夹紧臂401与主体支撑结构403相铰接,主体支撑结构403与夹紧臂401之间设有驱动元件402,夹紧臂401与轨道梁6的底面留有间隙,主驱动元件404用于驱动后部支撑部件4整体抬升,并使夹紧臂401压紧轨道梁6。
34.作为本发明的一种优选技术方案,主驱动元件404可采用液压千斤顶实现驱动后
部支撑部件4整体抬升,驱动元件402可采用直线电缸控制夹紧臂401的位置。
35.基于一种跨座式单轨架桥机支撑装置,本发明公开了一种跨座式单轨架桥机支撑方法,采用的技术方案是,当架桥机行走时,松开固定螺栓103,使虎口夹102与立柱8之间无刚性连接,然后拆卸主承力结构7,松开连接螺栓701与连接销轴704,将主承力结构水平板702与主承力结构的竖向板703卸下,之后使前支撑部件101收缩,从而使前部支撑部件1脱开与立柱8之间的连接,承载结构2底部的主行走机构3落在轨道梁6上,同时主驱动元件404收缩,使夹紧臂401松开对轨道梁6的夹紧,驱动元件402伸长,夹紧臂401向外打开,脱离与轨道梁6的连接,然后副行走机构5也落在轨道梁6上,实现正常行驶;当需要架桥时,驱动元件402收缩,放下后部支撑部件4的夹紧臂401,此时放下后的夹紧臂401的接触面与轨道梁6的底板还有一段特意留下的间隙,此间隙的作用是留有足够余量与不同的曲线段的轨道梁6进行配合,放下夹紧臂401之后,主驱动元件404将后部支撑部件4进行整体抬升以补偿间隙并使夹紧臂401与轨道梁6紧密贴合,使主体支撑结构403保持固定高度,而后安装主承力结构7,使用连接螺栓701将主承力结构水平板702与立柱8的顶面固定,使用连接销轴704将主承力结构的竖向板703与立柱8的筋板连接固定,然后利用固定螺栓103将虎口夹102与主承力结构7连接固定,之后通过调整两个前支撑部件101的伸长量抬升承载结构2,支撑整个架桥机的同时,采用三点确定一个平面的原理进行对架桥机的水平度进行调节,以保证吊装工作的完成。
36.本发明涉及的机械连接为本领域技术人员采用的惯用手段,可通过有限次试验得到技术启示,属于公知常识。
37.本文中未详细说明的部件为现有技术。
38.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通,对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
39.上述虽然对本发明的具体实施例作了详细说明,但是本发明并不限于上述实施例,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化,而不具备创造性劳动的修改或变形仍在本发明的保护范围以内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1