一种防撞击智能保护装置的汽车道闸的制作方法
1.本发明涉及汽车道闸领域,具体涉及一种防撞击智能保护装置的汽车道闸。
背景技术:
2.基于于实际情况和装置整体结构限制,汽车道闸受到冲撞主要为闸杆在水平方向非正常偏转,该状态下因整体为杠杆结构,闸机受力放大内部部件会发生不可逆破坏,同时在闸道开启过程中附近有行人或者障碍物均会出现消极后果,现有对闸道保护方式通过及时抬起避免撞击,一方面其容易误触发影响闸道正常运行,另一方面汽车速度过快时任然无法避免闸道被破坏。
3.因此有必要提供一种防撞击智能保护装置的汽车道闸,以解决上述背景技术中提出的问题。
技术实现要素:
4.为实现上述目的,本发明提供如下技术方案:一种防撞击智能保护装置的汽车道闸,包括:
5.道沿,分布在两侧,且中间为双向通道,包括入口闸道和出口闸道;
6.岗亭,布置在所述双向通道之间;
7.第一监测雷达,布置为两个,固定在所述岗亭两侧,且所述第一监测雷达对应监测第一警戒区;
8.第二监测雷达,述双向通道之间;
9.第一监测雷达,布置为两个,固定在所述岗亭两侧,且所述第二监测雷达对应监测第二警戒区;
10.第三监测雷达,述双向通道之间;
11.第一监测雷达,布置为两个,固定在所述岗亭两侧,且所述第三监测雷达对应监测第三警戒区;
12.闸机,布置为两组,安装在所述岗亭上,分别对应入口闸道和出口闸道;以及
13.摄像示警部件,布置为两组,安装固定在所述岗亭上,安装位置对应于所述闸机。
14.进一步,作为优选,所述第一监测雷达、第二监测雷达、第三监测雷达从驶入方向依次排列,所述第一监测雷达用于监测是否有车辆经过第一警戒区,所述第二监测雷达用于监测车辆是否经过第二警戒区,并与所述第一监测雷达共同监测经过车辆的速度,所述第三监测雷达用于监测对应第三警戒区内是否处于空旷状态,主要针对该区域内是否有行人或者障碍物妨碍所述闸机工作,以及车辆是否驶入所述第三警戒区妨碍摄像示警部件正常采集车辆信息以及妨碍所述闸机工作。
15.进一步,作为优选,所述闸机6内部安装有控制元件,用于分析所述第一监测雷达3、第二监测雷达4、第三监测雷达5所采集的数据,控制所述摄像示警部件7和所述闸机6工作,第一警戒区到第三警戒区之间的路程为skm,第二警戒区到第三警戒区路程为s2km,设
定警戒速度为akm/h满足a《设定提示速度为bkm/h同时满足和b≤s2/3s,其中g=9.8m/s2,μ为总摩擦系数,1m为取定安全距离,3s为摄像示警部件7信息采集以闸机6开放所需时间,警戒速度akm/h保证车辆制动距离小于skm,同时提示速度bkm/h保证车辆制动距离小于s2km,同时保证车辆从第二警戒区到第三警戒区前足够完成信息采集以及闸机6完全开放。
16.进一步,作为优选,所述闸机包括:
17.支板,布置为两个,对称固定在外壳内部,且所述支板上开设有导向槽;
18.传动组件,安装在所述支板之间;
19.转接头,通过铰接杆转动设置在所述支板之间,且一端与所述传动组件铰接,铰接处设置有导杆,并由所述导向槽限制滑动方向;
20.第二保护组件,固定安装在所述转接头另一端;以及
21.闸杆,端部与所述第二保护组件固定连接。
22.进一步,作为优选,所述传动组件包括:
23.偏转架,通过支杆转动设置在所述支板之间;
24.压杆,滑动设置在所述偏转架上,其上同轴设置有限位凸台,且所述压杆一端连接驱动部件由其控制滑动,另一端与所述转接头铰接;以及
25.第一保护组件,同轴套接在所述压杆上,且两端分别接触所述偏转架和限位凸台端面。
26.进一步,作为优选,所述第一保护组件内包含应急弹簧、套接环、临时锁紧部件,所述套接环位于所述应急弹簧和限位凸台之间,所述临时锁紧部件连接所述套接环和偏转架,所述临时锁紧部件由所述闸机控制,所述应急弹簧包括两种状态,一种为通过所述套接环和所述临时锁紧部件固定保持压缩状态,另一种为临时锁紧部件断开作为驱动件驱动所述压杆下移。
27.进一步,作为优选,所述第二保护组件包括:
28.凸接头,其一端固定在所述闸杆上;
29.凹接头,其一端固定在所述转接头上,且其上设置有卡条;以及
30.软胶套,套接在所述凸接头和凹接头外。
31.进一步,作为优选,所述凸接头和凹接头相互配合,在连接处变形超过限度通过弧形边缘支撑撬动使得连接断开,所述卡条限制所述凸接头和凹接头在竖直方向上的相对运动。
32.与现有技术相比,本发明提供一种防撞击智能保护装置的汽车道闸,具有以下有益效果:
33.1.本发明中通过设立第一监测雷达、第二监测雷达、第三监测雷达对经过车辆监测,以及协调控制摄像示警部件和所述闸机工作,当车辆以超过akm/h的速度经过第一警戒区通过摄像示警部件进行示警提示减速并开始记录保存车辆经过视频信息,若车辆经过第二警戒区时速度仍大于bkm/h立即启动保护程序,有效确立保护程序启动方案,同时保护程序被误启动的概率处于较低水平;
34.2.本发明中当确定需要启动保护程序时,控制压杆下滑使得闸杆抬起,同时控制
所述临时锁紧部件断开由所述应急弹簧辅助所述压杆下滑,提高所述闸杆抬起的响应速度避免被直接冲撞,同时通过摄像示警部件进行示警,并全程记录车辆冲撞信息,该保护程序通过确定车辆到闸杆之间的距离和车辆的速度,确定车辆到来前无法完全抬起为后续处理提供支持;
35.3.本发明中基于第一保护组件无法及时达到保护目的的情况下,通过第二保护组件以断开传动链条进行止损式保护,所述闸杆在受到冲撞时,相对应所述所述凸接头和凹接头连接处在水平方向为主要受力方向,所述凸接头和凹接头连接处在水平方向可以及时断开避免其他部件受到不可逆破坏。
附图说明
36.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
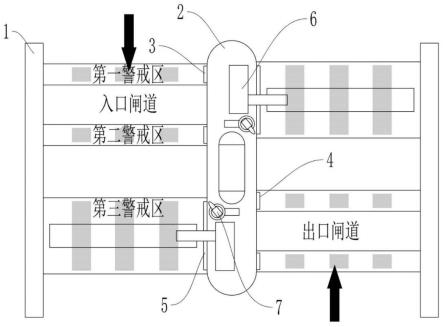
37.图1为一种防撞击智能保护装置的汽车道闸的整体结构示意图;
38.图2为一种防撞击智能保护装置的汽车道闸的闸机结构示意图;
39.图3为一种防撞击智能保护装置的汽车道闸的传动组件示意图;
40.图4为一种防撞击智能保护装置的汽车道闸的第二保护组件结构示意图;
41.图中:1、道沿;2、岗亭;3、第一监测雷达;4、第二监测雷达;5、第三监测雷达;6、闸机;61、支板;62、导向槽;63、传动组件;631、偏转架;632、支杆;633、第一保护组件;634、压杆;635、限位凸台;64、转接头;65、铰接杆;66、第二保护组件;661、凸接头;662、凹接头;663、卡条;664、软胶套;67、闸杆;7、摄像示警部件。
具体实施方式
42.请参阅图1-4,本发明实施例中,一种防撞击智能保护装置的汽车道闸,包括:
43.道沿1,分布在两侧,且中间为双向通道,包括入口闸道和出口闸道;
44.岗亭2,布置在所述双向通道之间;
45.第一监测雷达3,布置为两个,固定在所述岗亭2两侧,且所述第一监测雷达3对应监测第一警戒区;
46.第二监测雷达4,布置为两个,固定在所述岗亭2两侧,且所述第二监测雷达4对应监测第二警戒区;
47.第三监测雷达5,布置为两个,固定在所述岗亭2两侧,且所述第三监测雷达5对应监测第三警戒区;
48.闸机6,布置为两组,安装在所述岗亭2上,分别对应入口闸道和出口闸道;以及
49.摄像示警部件7,布置为两组,安装固定在所述岗亭2上,安装位置对应于所述闸机6。
50.作为较佳的实施例,所述第一监测雷达3、第二监测雷达4、第三监测雷达5从驶入方向依次排列,所述第一监测雷达3用于监测是否有车辆经过第一警戒区,所述第二监测雷达4用于监测车辆是否经过第二警戒区,并与所述第一监测雷达3共同监测经过车辆的速度,所述第三监测雷达5用于监测对应第三警戒区内是否处于空旷状态,主要针对该区域内是否有行人或者障碍物妨碍所述闸机6工作,以及车辆是否驶入所述第三警戒区妨碍摄像
示警部件7正常采集车辆信息以及妨碍所述闸机6工作。
51.作为较佳的实施例,所述闸机6内部安装有控制元件,用于分析所述第一监测雷达3、第二监测雷达4、第三监测雷达5所采集的数据,控制所述摄像示警部件7和所述闸机6工作,第一警戒区到第三警戒区之间的路程为skm,第二警戒区到第三警戒区路程为s2km,设定警戒速度为akm/h满足a《设定提示速度为bkm/h同时满足和b≤s2/3s,其中g=9.8m/s2,μ为总摩擦系数,1m为取定安全距离,3s为摄像示警部件7信息采集以闸机6开放所需时间,警戒速度akm/h保证车辆制动距离小于skm,同时提示速度bkm/h保证车辆制动距离小于s2km,同时保证车辆从第二警戒区到第三警戒区前足够完成信息采集以及闸机6完全开放。
52.需要解释的是,正常工作状态下,车辆经过第一警戒区时控制第三监测雷达5启动监测对应第三警戒区内是否处于空旷状态,之后当车辆以bkm/h以下的速度经过第二警戒区,此时摄像示警部件7采集车辆信息闸机6开启允许车辆通行。
53.从车辆经过第一警戒区到闸机6完全开启时间段内,若车辆驶入第三警戒区以及第三警戒区内有行人或障碍物,则通过摄像示警部件7进行示警提示避让,当车辆以超过bkm/h同且低于akm/h的速度经过第一警戒区,通过摄像示警部件7进行示警提示减速,当车辆以超过akm/h的速度经过第一警戒区通过摄像示警部件7进行示警提示减速并开始记录保存车辆经过视频信息,若车辆经过第二警戒区时速度仍大于bkm/h立即启动保护程序,有效确立保护程序启动方案,同时保护程序被误启动的概率处于较低水平。
54.本实施例中,如图2,所述闸机6包括:
55.支板61,布置为两个,对称固定在外壳内部,且所述支板61上开设有导向槽62;
56.传动组件63,安装在所述支板61之间;
57.转接头64,通过铰接杆65转动设置在所述支板61之间,且一端与所述传动组件63铰接,铰接处设置有导杆,并由所述导向槽62限制滑动方向;
58.第二保护组件66,固定安装在所述转接头64另一端;以及
59.闸杆67,端部与所述第二保护组件66固定连接。
60.本实施例中,如图3,所述传动组件63包括:
61.偏转架631,通过支杆632转动设置在所述支板61之间;
62.压杆634,滑动设置在所述偏转架631上,其上同轴设置有限位凸台635,且所述压杆634一端连接驱动部件由其控制滑动,另一端与所述转接头64铰接;以及
63.第一保护组件633,同轴套接在所述压杆634上,且两端分别接触所述偏转架631和限位凸台635端面。
64.作为较佳的实施例,所述第一保护组件633内包含应急弹簧、套接环、临时锁紧部件,所述套接环位于所述应急弹簧和限位凸台635之间,所述临时锁紧部件连接所述套接环和偏转架631,所述临时锁紧部件由所述闸机6控制,所述应急弹簧包括两种状态,一种为通过所述套接环和所述临时锁紧部件固定保持压缩状态,另一种为临时锁紧部件断开作为驱动件驱动所述压杆634下移。
65.需要解释的是,基于所述第一监测雷达3、第二监测雷达4、第三监测雷达5所监测到的信息,当确定需要启动保护程序时,控制压杆634下滑使得闸杆67抬起,同时控制所述
临时锁紧部件断开由所述应急弹簧辅助所述压杆634下滑,提高所述闸杆67抬起的响应速度避免被直接冲撞,同时通过摄像示警部件7进行示警,并全程记录车辆冲撞信息,该保护程序通过确定车辆到闸杆67之间的距离和车辆的速度,确定车辆到来前无法完全抬起为后续处理提供支持。
66.本实施例中,如图4,所述第二保护组件66包括:
67.凸接头661,其一端固定在所述闸杆67上;
68.凹接头662,其一端固定在所述转接头64上,且其上设置有卡条663;以及
69.软胶套664,套接在所述凸接头661和凹接头662外。
70.作为较佳的实施例,所述凸接头661和凹接头662相互配合,在连接处变形超过限度通过弧形边缘支撑撬动使得连接断开,所述卡条663限制所述凸接头661和凹接头662在竖直方向上的相对运动。
71.需要解释的是,基于第一保护组件633无法及时达到保护目的的情况下,通过第二保护组件66以断开传动链条进行止损式保护,由于实际情况和装置整体结构限制,汽车道闸受到冲撞主要为闸杆67在水平方向非正常偏转,该状态下因整体为杠杆结构,闸机6受力放大内部部件会发生不可逆破坏,正常工作状态下,通过所述转接头64带动闸杆67在竖直方向上偏转抬起或落下,相对应所述所述凸接头661和凹接头662连接处在竖直方向为主要受力方向,所述闸杆67在受到冲撞时,相对应所述凸接头661和凹接头662连接处在水平方向为主要受力方向,所述卡条663一方面提高述所述凸接头661和凹接头662连接处在竖直方向的承载能力保证正常工作,另一方面确保所述闸杆67在收到冲撞时所述凸接头661和凹接头662连接处在水平方向可以及时断开避免其他部件受到不可逆破坏。
72.在具体实施时,车辆经过第一警戒区时控制第三监测雷达5启动监测对应第三警戒区内是否处于空旷状态,之后车辆以低于bkm/h的速度经过第二警戒区,此时摄像示警部件7采集车辆信息闸机6开启允许车辆通行,当车辆以超过akm/h的速度经过第一警戒区时,通过摄像示警部件7进行示警提示减速并开始记录保存车辆经过视频信息,若车辆经过第二警戒区时速度仍大于bkm/h立即启动保护程序,控制压杆634下滑使得闸杆67抬起,同时控制所述临时锁紧部件断开由所述应急弹簧辅助所述压杆634下滑,提高所述闸杆67抬起的响应速度避免被直接冲撞,同时通过摄像示警部件7进行示警,并全程记录车辆冲撞信息,基于第一保护组件633无法及时达到保护目的的情况下,通过第二保护组件66以断开传动链条的方式进行止损式保护。
73.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1