一种清洁装置的工作方法
1.本发明涉及沙滩清洁技术领域,具体涉及一种清洁装置的工作方法。
背景技术:
2.随着社会的发展和人民生活水平的提高,民众出游范围逐渐扩大,而海滩成为了热门选择区域,滨海旅游业在存在着巨大的市场潜力下,也带来了较大的环境问题,其中最为显著的是沙滩上层出不穷的各种垃圾,不仅污染环境,影响城市形象并且极大的影响游客的旅游心情。
3.目前沙滩垃圾清理的主流方式仍然是纯人工清理和大型垃圾清理机械装置。但是,纯人工清理不仅费力而且效率不高,需要人工对沙滩上的垃圾物逐个进行拾捡,工作效率也十分低,不适宜现下高速发展的沙滩旅游事业。市面上已有的沙滩清洁车大部分还是人工操作,但操作流程复杂,清理效果一般导致适用性较弱。而现在的较多沙滩清洁车,都是直接输送垃圾进垃圾箱,对于附着在垃圾上的沙子没有做到分离,由此容易导致垃圾箱内出现过多的沙子。
技术实现要素:
4.本发明的目的在于提供一种清洁装置的工作方法,可方便地实现沙子跟垃圾的分离,且还能节省垃圾箱的空间,垃圾收集效率高。
5.为达到上述目的,一种清洁装置的工作方法,具体步骤包括:(1)移动机构在沙滩上进行移动。
6.(2)输送驱动组件驱动输送带转动并带动垃圾钩进行动作。
7.(3)垃圾钩在移动过程中铲入沙滩的沙子中将垃圾勾住。
8.(4)垃圾钩带动垃圾向上移动将垃圾输送至筛沙箱内。
9.(41)附着在垃圾上的沙子在输送的过程中抖动脱落。
10.(42)垃圾落入筛沙箱内后,筛沙箱将沙子筛回至沙滩。
11.(5)垃圾抓取部件启动将垃圾抓取并放到垃圾箱内。
12.(6)当垃圾桶内垃圾放满后,压缩驱动组件驱动压缩板对垃圾进行压缩。
13.所述清洁装置包括车体,在车体内设有清洁机构,在车体外设有移动机构,所述清洁机构通过机架设置在车体内,所述清洁机构包括输送装置、压缩装置和垃圾分类装置,在机架的后端设有垃圾箱,在机架的前端设有输送装置,在垃圾箱内设有压缩装置,在垃圾箱与输送装置之间设有垃圾分类装置;在车体的底端设有开口,所述清洁机构通过机架设置在车体的内壁。
14.所述输送装置包括输送驱动组件和输送带,所述输送驱动组件设置在车体内,在输送驱动组件上设有输送带;所述输送带的底端位于开口上;在输送带上设有一个以上的垃圾钩。
15.垃圾分类装置设置在车体的顶端,所述垃圾分类装置包括筛沙箱和垃圾抓取部
件,所述筛沙箱设置在输送带的顶端与垃圾箱之间,在筛沙箱上方的车体上设有垃圾抓取部件,在垃圾抓取部件上还设有分类感应组件。
16.所述压缩装置包括压缩板和压缩驱动组件,所述压缩驱动组件设置在垃圾箱内的一端,在压缩驱动组件上设有压缩板;所述压缩驱动组件驱动压缩板向垃圾箱的另一端移动。
17.上述结构的清洁装置,通过输送装置实现将沙滩上的垃圾进行捡取并输送至垃圾分类装置上,在通过垃圾分类装置对垃圾进行抓取并放置到垃圾箱内,而在输送装置输送垃圾的过程中附带的沙子也会在输送的过程中抖动落下以及通过筛沙箱的作用重新被筛回至沙滩上,从而方便沙子跟垃圾能够更好的分离,清洁效率高;在清洁时移动机构在沙滩上进行移动,同时输送驱动组件驱动输送带移动并垃圾钩向上移动,在垃圾钩移动的过程中,垃圾钩铲入沙子中将沙滩上的垃圾勾住并带动垃圾向上移动从而将垃圾输送至筛沙箱内,而在输送带输送垃圾的过程中,由于输送带会出现振动,从而可以将附着在垃圾上的沙子抖松脱离,当垃圾被输送至筛沙箱内后能够进行一步将沙子筛落,当垃圾位于筛沙箱内后,垃圾抓取部件启动将垃圾抓取并放到垃圾箱内,由此实现垃圾的收集,清洁效率高,清洁过程无需人工操作,可节省人工劳动力;当垃圾箱内的垃圾放满后,压缩驱动组件启动压缩板向垃圾箱的另一端移动将垃圾进行压缩,由此可以节省垃圾箱的空间,使得垃圾箱能够装更多垃圾,从而垃圾收集效率高。
18.进一步的,所述输送驱动组件包括输送驱动电机、输送主动轮、输送从动轮和输送滑轮,所述输送驱动电机设置在车体内的顶端,在输送驱动电机的驱动轴上设有输送主动轮,所述输送从动轮通过输送安装轴转动的设置在车体的底端,所述输送带缠绕在输送主动轮和输送从动轮上,所述输送滑轮通过输送滑轮轴设置在输送主动轮和输送从动轮之间,所述输送滑轮与输送带滚动连接。
19.以上设置,通过输送驱动电机驱动输送主动轮转动,输送主动轮带动输送带进行移动,由此即可带动垃圾钩进行上下移动,从而即可实现垃圾的收集。
20.进一步的,在输送带位于输送主动轮一端的下方设有筛沙箱;在所述筛沙箱的底端设有滤网。由此设置,通过滤网可以使得垃圾被挡在筛沙箱内而沙子可自然落下回到地面上,结构简单且有效。
21.进一步的,所述垃圾箱包括位于机架一侧的可回收垃圾箱和位于机架另一侧的不可回收垃圾箱。由此设置,通过设置可回收垃圾箱和不可回收垃圾箱对垃圾进行分类,使得垃圾资源可以回收,从而提高垃圾的资源价值,降低垃圾的处理成本。
22.进一步的,所述垃圾抓取部件包括第一抓取机械手和第二抓取机械手,所述第一抓取机械手设置在机架一侧的车体上,所述第二抓取机械手设置在机架另一侧的车体上;在第一抓取机械手和第二抓取机械手上设有分类感应组件;所述分类感应组件包括第一红外传感器和高清摄像头,所述第一红外传感器和高清摄像头与第一抓取机械手和第二抓取机械手电连接。
23.步骤(5)具体包括:(51)第一红外传感器和高清摄像头检测并设别垃圾是否可回收。
24.(52)第一抓取机械手将可回收垃圾夹取并放置到可回收垃圾箱内。
25.(53)第二抓取机械手将不可回收垃圾夹取并放置到不可回收垃圾箱内。
26.以上设置,通过第一红外传感器和高清摄像头对垃圾进行分类后,再通过第一抓取机械手和第二抓取机械手的设置分别对可回收垃圾和不可回收垃圾进行分类抓取,效率高且不容易分错。
27.进一步的,所述压缩驱动组件包括压缩气缸和压缩气缸安装座,所述压缩气缸通过压缩气缸安装座设置在垃圾箱的一端,压缩气缸的活塞杆伸入垃圾箱内并连接压缩板,在垃圾箱上方的车体上还设有第二红外传感器,所述第二红外传感器与压缩气缸电连接。
28.以上设置,当垃圾箱内的垃圾放满后,压缩气缸驱动压缩板向垃圾箱的另一端移动将垃圾进行压缩,由此可以节省垃圾箱的空间,使得垃圾箱能够装更多垃圾。
29.进一步的,所述移动机构包括移动电机、移动主动轮、移动第一从动轮、移动第二从动轮、移动辅助轮、移动履带和移动安装架,所述移动安装架固定在车体上,在移动安装架的顶端设有移动电机,在移动电机的驱动轴上设有移动主动轮,所述移动第一从动轮通过第一移动连接轴转动的设置在移动安装架底端的一侧,移动第二从动轮通过第二移动连接轴转动的设置在移动安装架底端的另一侧,所述移动履带缠绕在移动主动轮和第一从动轮与第二从动轮上,在移动安装架底端的中部设有移动辅助轮,所述移动辅助轮与移动履带滚动连接。
30.以上设置,通过移动电机驱动移动主动轮转动从而带动移动履带进行动作,由此实现清洁装置的移动,结构简单且有效。
附图说明
31.图1为本发明的清洁装置的结构示意图。
32.图2为本发明的清洁装置的内部结构示意图。
33.图3为图2中a处的放大图。
34.图4为本发明的清洁装置内部结构的俯视图。
35.图5为本发明的清洁装置的侧视图。
36.图6为图5中c的放大图。
37.图7为本发明的清洁装置的工作方法。
具体实施方式
38.下面结合附图和具体实施方式对本发明做进一步详细说明。
39.如图1至图6所示,一种清洁装置的工作方法,包括车体1,在车体1内设有清洁机构2,在车体1外设有移动机构3,所述清洁机构2通过机架20设置在车体1内,所述清洁机构2包括输送装置4、压缩装置5和垃圾分类装置6,在机架20的后端设有垃圾箱11,在机架20的前端设有输送装置4,在垃圾箱11内设有压缩装置5,在垃圾箱11与输送装置4之间设有垃圾分类装置6;在车体1的底端设有开口10,所述清洁机构2通过机架20设置在车体1的内壁。
40.所述输送装置4包括输送驱动组件41和输送带42,所述输送驱动组件41设置在车体1内,在输送驱动组件41上设有输送带42;所述输送带42的底端位于开口10上;在输送带42上设有一个以上的垃圾钩40。
41.垃圾分类装置6设置在车体1的顶端,所述垃圾分类装置6包括筛沙箱61和垃圾抓取部件62,所述筛沙箱61设置在输送带42的顶端与垃圾箱11之间,在筛沙箱61上方的车体1
上设有垃圾抓取部件62,在垃圾抓取部件62上还设有分类感应组件(图中未示出)。
42.所述压缩装置5包括压缩板51和压缩驱动组件52,所述压缩驱动组件52设置在垃圾箱11内的一端,在压缩驱动组件52上设有压缩板51;所述压缩驱动组件52驱动压缩板51向垃圾箱11的另一端移动。
43.上述结构的清洁装置,通过输送装置4实现将沙滩上的垃圾进行捡取并输送至垃圾分类装置6上,在通过垃圾分类装置6对垃圾进行抓取并放置到垃圾箱11内,而在输送装置4输送垃圾的过程中附带的沙子也会在输送的过程中抖动落下以及通过筛沙箱61的作用重新被筛回至沙滩上,从而使得沙子跟垃圾能够更好的分离,清洁效率高;在清洁时移动机构3在沙滩上进行移动,同时输送驱动组件41驱动输送带42移动并垃圾钩40向上移动,在垃圾钩40移动的过程中,垃圾钩40铲入沙子中将沙滩上的垃圾勾住并带动垃圾向上移动从而将垃圾输送至筛沙箱61内,而在输送带42输送垃圾的过程中,由于输送带42会出现振动,从而可以将附着在垃圾上的沙子抖松脱离,当垃圾被输送至筛沙箱61内后能够进行一步将沙子筛落,当垃圾位于筛沙箱61内后,垃圾抓取部件62启动将垃圾抓取并放到垃圾箱11内,由此实现垃圾的收集,清洁效率高,清洁过程无需人工操作,可节省人工劳动力;当垃圾箱11内的垃圾放满后,压缩驱动组件52启动压缩板51向垃圾箱11的另一端移动将垃圾进行压缩,由此可以节省垃圾箱11的空间,使得垃圾箱11能够装更多垃圾。
44.如图2和图3所述,所述输送驱动组件41包括输送驱动电机411、输送主动轮412、输送从动轮413和输送滑轮414,所述输送驱动电机411设置在车体1内的顶端,在输送驱动电机411的驱动轴上设有输送主动轮412,所述输送从动轮413通过输送安装轴415转动的设置在车体1的底端,所述输送带42缠绕在输送主动轮412和输送从动轮413上,所述输送滑轮414通过输送滑轮轴416设置在输送主动轮412和输送从动轮413之间,所述输送滑轮414与输送带42滚动连接。
45.以上设置,通过输送驱动电机驱动输送主动轮转动,输送主动轮带动输送带进行移动,由此即可带动垃圾钩进行上下移动(所述垃圾钩的移动方向如图3中箭头所示),从而即可实现垃圾的收集。
46.如图3所示,在输送带42位于输送主动轮412一端的下方设有筛沙箱61;在所述筛沙箱61的底端设有滤网(图中未示出)。由此设置,通过滤网可以使得垃圾被挡在筛沙箱61内而沙子可自然落回到地面上,结构简单且有效。
47.如图4所示,所述垃圾箱11包括位于机架20一侧的可回收垃圾箱111和位于机架20另一侧的不可回收垃圾箱112。由此设置,通过设置可回收垃圾箱111和不可回收垃圾箱112对垃圾进行分类,使得垃圾资源可以回收,从而提高垃圾的资源价值,降低垃圾的处理成本。
48.如图4所示,所述垃圾抓取部件62包括第一抓取机械手621和第二抓取机械手622,所述第一抓取机械手621设置在机架20一侧的车体1上,所述第二抓取机械手622设置在机架20另一侧的车体1上;在第一抓取机械手621和第二抓取机械手622上设有分类感应组件;所述分类感应组件包括第一红外传感器和高清摄像头,所述第一红外传感器和高清摄像头与第一抓取机械手和第二抓取机械手电连接。在本实施例中,所述第一抓取机械手和第二抓取机械手为现有技术,在此不再累述。以上设置,通过第一红外传感器和高清摄像头对垃圾进行分类后,再通过第一抓取机械手和第二抓取机械手的设置分别对可回收垃圾和不可
回收垃圾进行分类抓取,效率高且不容易分错。
49.如图4所示,所述压缩驱动组件52包括压缩气缸521和压缩气缸安装座522,所述压缩气缸521通过压缩气缸安装座522设置在垃圾箱11的一端,压缩气缸521的活塞杆伸入垃圾箱11内并连接压缩板51,在垃圾箱11上方的车体1上还设有第二红外传感器(图中未示出),所述第二红外传感器与压缩气缸521电连接。
50.在本实施例中,通过红外传感器和高清摄像头对垃圾进行分类以及通过红外传感器检测垃圾桶内垃圾是否为满的状态均为现有技术,在此不再累述。
51.以上设置,当垃圾箱11内的垃圾放满后,压缩气缸521驱动压缩板51向垃圾箱11的另一端移动将垃圾进行压缩,由此可以节省垃圾箱11的空间,使得垃圾箱11能够装更多垃圾。
52.如图5和图6所示,所述移动机构3包括移动电机31、移动主动轮32、移动第一从动轮33、移动第二从动轮34、移动辅助轮35、移动履带36和移动安装架37,所述移动安装架37固定在车体1上,在移动安装架37的顶端设有移动电机31,在移动电机31的驱动轴上设有移动主动轮32,所述移动第一从动轮33通过第一移动连接轴331转动的设置在移动安装架37底端的一侧,移动第二从动轮34通过第二移动连接轴341转动的设置在移动安装架37底端的另一侧,所述移动履带36缠绕在移动主动轮32和第一从动轮33与第二从动轮34上,在移动安装架37底端的中部设有移动辅助轮35,所述移动辅助轮35与移动履带36滚动连接。
53.以上设置,通过移动电机驱动移动主动轮转动从而带动移动履带进行动作,由此实现清洁装置的移动,结构简单且有效。
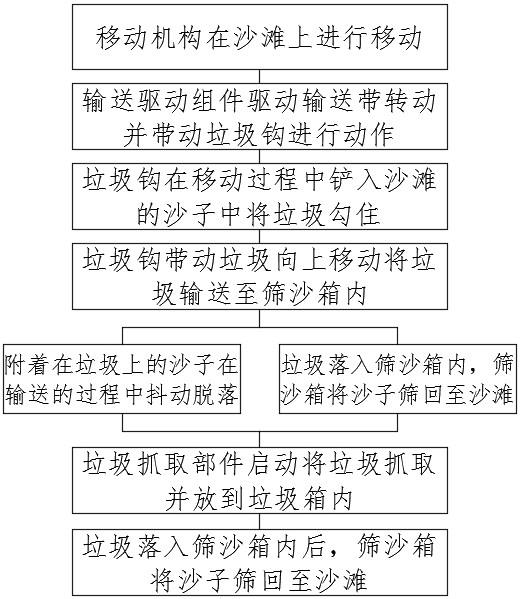
54.如图7所示,一种清洁装置的工作方法,具体步骤包括:(1)移动机构在沙滩上进行移动。
55.(2)输送驱动组件驱动输送带转动并带动垃圾钩进行动作。
56.(3)垃圾钩在移动过程中铲入沙滩的沙子中将垃圾勾住。
57.(4)垃圾钩带动垃圾向上移动将垃圾输送至筛沙箱内。
58.(41)附着在垃圾上的沙子在输送的过程中抖动脱落。
59.(42)垃圾落入筛沙箱内后,筛沙箱将沙子筛回至沙滩。
60.(5)垃圾抓取部件启动将垃圾抓取并放到垃圾箱内。
61.(51)第一红外传感器和高清摄像头检测并设别垃圾是否可回收。
62.(52)第一抓取机械手将可回收垃圾夹取并放置到可回收垃圾箱内。
63.(53)第二抓取机械手将不可回收垃圾夹取并放置到不可回收垃圾箱内。
64.(6)当垃圾桶内垃圾放满后,压缩驱动组件驱动压缩板对垃圾进行压缩。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1