一种智能清扫车的主扫装置的制作方法
1.本发明属于道路清扫装置,尤其是涉及一种使用滚扫方式进行清扫的清扫车。
背景技术:
2.现在几乎所有道路都需要清扫保洁;包括野外道路、市镇道路、居民小区、工厂学校道路等等,这是一个十分面广量大的工作;现有市场上的清扫保洁工具主要有二类:一类主要是采用吸尘清扫,大型清扫车都是采用吸尘方式清扫垃圾,该方式除了供车轫行走动力外,尚需配备很大的动力吸尘,且清理空气过滤系统繁琐;二是采用较大直径的滚刷作用于路面,被滚刷抛起的垃圾靠自然惯性落进较低位的垃圾箱,有些小型清扫车即采用该抛洒法清扫;前者售价大,使用成本高,许多用户用不起;后者低位垃圾箱容积小,效率低,清扫中产生大量扬尘,二次污染环境,也难以被普遍采用;使之当前清扫工作仍然靠大量的人力在作业;市场极需一种既简单省力又环保,能被普通大众所接受的清扫工具,让众多的劳动力从繁重的清扫劳动中解脱出来。
3.现有技术中,较大直径的滚刷清扫车经过路面的技术中,这种滚刷一般被称为主扫,使这些主扫普遍存在清扫效果差的问题。
技术实现要素:
4.本发明所要解决的技术问题是提供一种智能清扫车的主扫装置。
5.本发明是通过以下技术方案来实现的:
6.一种智能清扫车的主扫装置,所述主扫装置固定在清扫车的车架后侧中部,包括旋转主轴,旋转主轴上安装有扫刷装置,所述的扫刷装置是可伸缩的,在旋转主轴上沿轴线方向成排分布;所述的扫刷装置包括扫杆和刷毛,扫杆连接旋转主轴,扫杆的端部有刷毛;旋转主轴内有用于同时驱动所有的扫杆的驱动轴;所述的旋转主轴受控于旋转主轴动力机构;所述驱动轴受控于驱动轴动力机构。
7.作为进一步的改进,所述的驱动轴是齿轮轴,扫杆与驱动轴相触的面是齿条,齿条与齿轮轴的齿相啮合,使齿轮轴转动时多个齿条同时移动;旋转主轴上有供齿条穿过的导向管。
8.本发明中所述的齿轮轴是指支承转动零件并与之一起回转以传递运动、扭矩或弯矩的机械零件,整体为金属圆杆状。各种各样的齿轮轴都是适用的,比如花键轴等。但需要齿条与齿轮轴能相互配合,使齿轮轴转动时多个齿条同时移动即可达到目的。
9.作为进一步的改进,所述的导向管两两成一组,同组的导向管在齿轮轴两侧对称布置。
10.作为进一步的改进,所述的扫刷装置至少有六组。
11.作为进一步的改进,每组的扫刷装置的扫杆至少有两个,分别位于扫刷的两侧。
12.作为进一步的改进,所述的扫刷装置是成排内凹的。
13.作为进一步的改进,所述的主扫装置还包括扫刷长度检测装置。通过对扫刷装置
伸缩,来调节扫刷装置与地面的接触面积及接触力度,通过检测扫刷装置的长度,使扫刷装置在不断的磨损中对地面的接触面积及接触力度保持稳定。
14.作为进一步的改进,所述的扫刷长度检测装置是检测位置的传感器,所述的检测位置的传感器固定在车架上。在主扫装置长期使用的状态下,唯一经常进行变化的是刷毛的长度由于使用而磨损。因此,在旋转主轴与车架的位置相对固定的情况下,通过固定在车架上的检测位置的传感器可以进行检测出扫刷长度是否缩短,并得以依据传感器检测的数据来对磨损进行补偿。
15.作为进一步的改进,所述的位置传感器距离旋转主轴比旋转主轴距离地面的距离长。即可始终保持扫刷清扫到最底面时与地面接触的刷毛的面积及力度,一旦感应不到刷毛,说明刷毛已经磨损严重。
16.作为进一步的改进,驱动轴动力机构包括连接驱动轴的减速电机和导电滑环,所述的减速电机与旋转主轴同步旋转,所述的导电滑环给减速电机供电并控制减速电机的运行与停止。
17.作为进一步的改进,所述的旋转主轴包括圆筒和电机壳体,所述的驱动轴在圆筒内,所述的减速电机在电机壳体内,电机壳体和圆筒之间通过法兰连接。
18.作为进一步的改进,扫杆和刷毛的夹角在120
°
至175
°
之间,即使扫杆与刷毛之间存在一定的夹角,将有效提升清扫效果。
19.本发明的有益效果是:
20.1、扫刷磨损变短,由扫杆伸出补偿,扫刷始终保持与地面的最佳接触,并使滚扫直径不变,清扫轨迹不变;2、能耗小;3、磨损的扫刷便于更换。
附图说明
21.图1为扫刷伸出工作时的结构示意图;
22.图2为扫杆、驱动轴、减速电机、导电滑环的结构示意图;
23.图3为本发明圆筒、导向管的结构示意图;
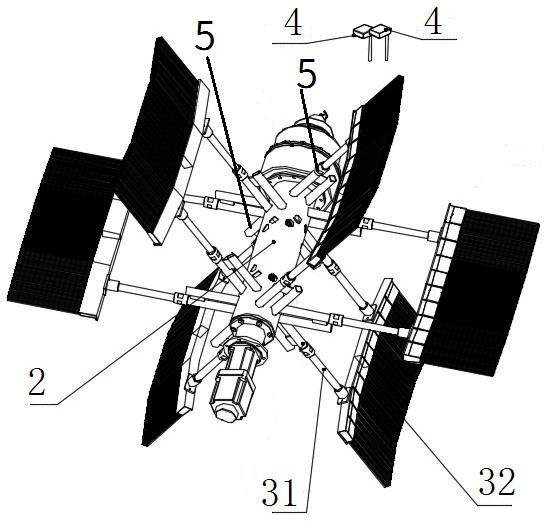
24.图4为本发明的侧视图;
25.图5为扫刷与车架的结合部分的结构示意图
26.对附图中的标记说明如下:
27.1、车架;2、旋转主轴;21、齿轮轴;22、圆筒;23、电机壳体;3、扫刷;31、扫杆;311、齿条;32、刷毛;4、检测位置的传感器;5、导向管;6、减速电机;7、导电滑环。
具体实施方式
28.如图1、图2所示,是一种智能清扫车的主扫装置,包括旋转主轴2,旋转主轴2上安装有扫刷装置3,所述的扫刷装置3是可伸缩的;图1为扫刷装置3伸出工作时的状态,图2为扫刷装置3收回时的状态。
29.为了实现扫刷装置3的伸缩,所述的旋转主轴2上有多组沿轴线方向成排分布的扫刷装置3,扫杆31连接旋转主轴2,扫杆31的端部有刷毛32;旋转主轴2内有用于同时驱动所有的扫杆31的驱动轴21。所述的旋转主轴受控于旋转主轴动力机构;所述驱动轴受控于驱动轴动力机构。即主轴动力机构带动旋转主轴2转动实现清扫,驱动轴动力机构带动驱动主
轴2转动,从而使扫杆31进行伸缩。
30.如图5所示,是驱动轴21与扫杆31配合的结构示意图。所述的驱动轴21是齿轮轴21,扫杆31与驱动轴21相触的面是齿条311,齿条311与齿轮轴21的齿相啮合,使驱动轴21转动时多个扫杆31同时移动。图5中齿轮轴21采用的是平齿,齿条311采用的也是平齿,具体实施过程中可根据需要换成别的齿。
31.齿轮轴21可选用的样式是多样的,比如使用花键轴、螺杆轴等不同的齿轮轴21,同时齿条也配合齿轮轴21使用不同的齿形,使螺杆轴转动时得以驱动齿条即可。
32.旋转主轴2上有供扫杆31穿过的导向管5,用来引导扫杆31伸缩的方向。导向管5两两成一组,同组的导向管5在驱动轴21两侧对称布置,即能确保扫杆31对称的分布在驱动轴21的两侧。所述的扫杆31至少有两个,分别位于扫刷装置3的两侧,来作为扫刷装置3两端的支撑维持扫刷装置3的稳定。
33.如图1至图4所示,所述的扫刷装置3至少有六组,得以均匀的分布开,从而缩小每一组扫刷装置3之间的夹角,来减少旋转主轴2转动时刷毛32无法作用于地面的时间。扫刷装置3数量越多,则主扫装置整体越接近圆柱体。如果扫刷装置3间距大,为了减少刷毛32无法作用于地面的时间,必须提高旋转主轴2的转速,或者更长的伸长扫刷装置3,而扫刷装置3密度够大时则不必要采用这些方式。
34.所述的旋转主轴2与车架1的位置相对固定;所述的主扫装置还包括扫刷长度检测装置。通过对扫刷装置3伸缩,来调节刷毛32与地面的接触面积及接触力度,通过检测并保证了扫刷装置3的长度,使刷毛32在不断的磨损中得到补偿,使对地面的接触面积及接触力度保持稳定。
35.如图5所示,扫杆和刷毛32的夹角在120
°
至175
°
之间,即使扫杆31与刷毛32之间存在一定的夹角,将有效提升清扫效果。
36.驱动轴动力机构包括连接驱动轴的减速电机6和导电滑环7,所述的减速电机6与旋转主轴2同步旋转,所述的导电滑环7给减速电机6供电并控制减速电机6的运行与停止。旋转主轴2包括圆筒22和电机壳体23,驱动轴在圆筒22内,减速电机6在电机壳体23内,电机壳体23和圆筒22之间通过法兰连接,减速电机6与旋转主轴2同步旋转。当导电滑环7给减速电机6供电,则减速电机6控制驱动轴旋转,从而使扫杆31伸缩。
37.如图1、图4所示,所述的扫刷长度检测装置是检测位置的传感器4,所述的检测位置的传感器4固定在车架1上,位置传感器在旋转主轴2的正上方。如图4中所示,采取的是对射式红外传感器,当清扫车启动后,旋转主轴2开始运转,扫刷装置3伸出,对射式红外传感器能感应到扫刷装置3的信号,减速电机6便停止工作。一旦接收不到信号了,则说明刷毛32已经磨损了。对射式红外传感器距离旋转主轴2比旋转主轴2距离地面的距离长。所列举的对射式红外传感器也可使用其他有检测位置功能的传感器进行替代。
38.清扫车在高速行驶,不在清扫状态时,扫杆31收回,扫刷装置3离地;清扫作业开始时,旋转主轴2运转,同时齿轮轴21开始转动,扫刷装置3伸出,红外对射传感器感应扫刷装置3的信号,能感应到信号时,齿轮轴21停转,扫刷装置3停止继续伸出,开始清扫。刷毛32磨损的情况下,扫杆31自动伸长到扫刷长度检测装置能感应到的位置;一旦扫杆31伸长到极限,还是无法感应到扫刷装置3,则刷毛32需要更换。
39.要实现上述技术方案,需要清扫车中有智能控制系统,智能控制系统都在智能清
扫车的驾驶室中配备,对此不再赘述。
40.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书所限定的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1