一种多功能排涝机器人及其工作方法与流程
本发明涉及应急救援,具体涉及一种多功能排涝机器人及其工作方法。
背景技术:
1、现有的排涝机器人功能较单一,只有排水的功能,而应急救援的场景较复杂,特别是野外救援,塌方、地面塌陷或者建筑倒塌等原因导致树木、大块硬物(石头、混凝土块)横在路中间,阻挡排涝机器人到达救援位置。此外,对于地震海啸等灾害引发的房屋倒塌及楼层积水,倒塌的房屋阻碍排涝机器人到达排涝位置,就需要救援人员进入倒塌的房屋中放置水泵等抽水设备,而倒塌的房屋使得救援人员前进困难且空气不流通,救援人员需要长时间停留在这种空气不流通的地方,对救援人员是极大的考验。
2、现有的排涝机器人只有排水功能,无法适应上述复杂的工作环境,只能配合其他的救援设备,而应急救援现场所有的救援设备都很紧张,这就导致排涝机器人的工作效率降低。
技术实现思路
1、本发明旨在提供一种多功能排涝机器人及其工作方法,以解决上述存在现有排涝机器人功能单一的问题。
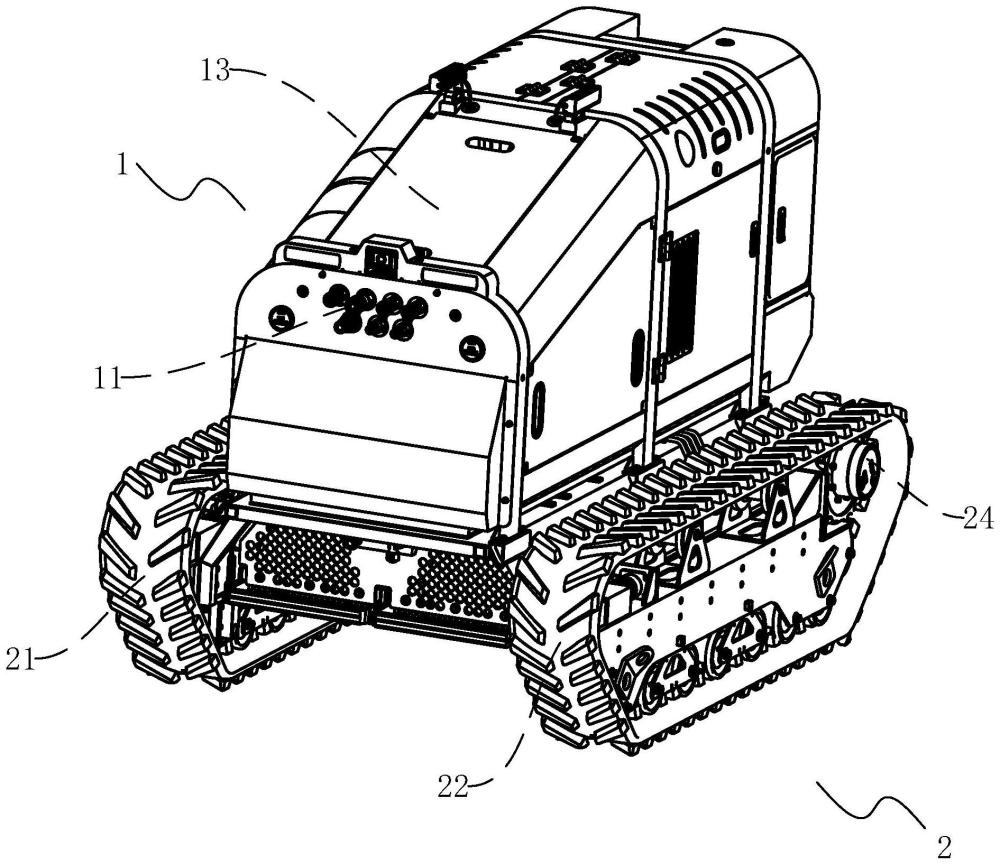
2、为实现上述目的,本发明的技术方案为:一种多功能排涝机器人,包括主体、行走机构、主水泵、液压控制系统,行走机构设置在主体两侧用于带动排涝机器人移动,主水泵设置在主体下方用于排水,还包括设置在主体上的多个外接接口,外接接口与液压控制系统连接,外接接口用于通过液压油管连接外部液压设备,液压控制系统设置在主体内用于控制内部液压设备和外部液压设备,内部液压设备为包括主水泵在内的设置在排涝机器人上的液压设备,外部液压设备为与排涝机器人分开的液压设备,仅在使用时与排涝机器人的外接接口连接,液压控制系统为负载敏感系统,能够根据负载的压力反馈,实时调节液压控制系统的流量,从而维持供给到液压设备所需的压力和流量的持续输出。
3、通过液压控制系统,能够控制排涝机器人自带的内部液压设备以及通过外接接口连接的外部液压设备,从而增加排涝机器人的功能,使排涝机器人在各种救援场景下都能充分发挥作用。
4、进一步,还包括与主水泵连接的液压油缸,液压油缸与液压控制系统连接,液压油缸在液压控制系统控制下升降从而带动主水泵升降。
5、进一步,所述主水泵具有两个,并排设置在主体下方,且在液压油缸的带动下同时升降。
6、进一步,所述行走机构包括设置在主体下方左右两侧的第一行走履带、第二行走履带及控制第一行走履带的第一行走马达、控制第二行走履带的第二行走马达,第一行走马达和第二行走马达均与液压控制系统连接,液压系统分别控制第一行走马达和第二行走马达,改变第一行走马达和第二行走马达转向和转速,从而使排涝机器人前进、后退、转向,并调节排涝机器人的速度。
7、进一步,所述液压控制系统包括油箱、液压泵、电比例控制阀,液压泵用于将油箱的液压油供给到电比例控制阀,电比例控制阀设置在液压泵和液压设备之间用于控制供给到液压设备的液压油的流量和通断,液压泵为负载敏感泵,根据负载的压力反馈,从而实时调节液压控制系统的流量,从而所述液压控制系统为负载敏感系统,液压设备包括所述内部液压设备和外部液压设备。
8、进一步,所述电比例控制阀具有多个工作联,每一工作联用于控制至少一个液压设备,工作联之间是单独控制从而防止不同工作联控制的液压设备互相影响。
9、进一步,还包括至少一个水位传感器,水位传感器的离地高度在130mm-180mm之间,当水位传感器为一个时,水位传感器设置在车体前侧;所述行走机构包括设置在主体下方左右两侧的第一行走履带、第二行走履带,当水位传感器超过一个时,除车体前侧以外,水位传感器还设置在第一行走履带或者第二行走履带的一侧,且不超过第一行走履带或者第二行走履带的外轮廓边界。
10、一种多功能排涝机器人的工作方法,至少包括以下工作模式1及工作模式2-4中的任一工作模式:
11、工作模式1:当排涝位置是排涝机器人能够到达的位置时,排涝机器人进入积水区域,液压控制系统控制排涝机器人自带的水泵下降,开启水泵进行抽水排涝工作;
12、工作模式2:当排涝位置是排涝机器人无法到达的位置时,将外接水泵插接到排涝机器人的外接接口上,排涝机器人的液压控制系统控制外接水泵工作以进行排水工作;
13、工作模式3:当需要清除障碍物时,根据障碍物的类型,选择对应的外部液压设备连接到排涝机器人的外接接口,排涝机器人的液压控制系统控制所述外部液压设备工作以清除障碍物;
14、工作模式4:当需要通风换气时,将液压风机插接到排涝机器人的外接接口,并将通风管道连接到通风换气的位置,排涝机器人的液压控制系统控制液压风机工作以进行通风换气。
15、排涝机器人通过连接外部的液压设备,扩大排涝的场地范围,还能在应急救援过程中进行清除障碍物或者对通风不畅的场所进行通风换气等辅助性工作,增加排涝机器人的功能,扩大排涝机器人的适用范围。
16、进一步,所述排涝机器人能够到达的位置是指其行走机构能够到达且积水深度不高于排涝机器人最大涉水深度的场所。
17、进一步,每一工作联均包括主阀芯以及多个液压油输出口,液压油输出口用于与内部液压设备连接或者通过外接接口与外部液压设备连接,主阀芯用于控制供油油路的液压油供给到液压油输出口或者回流到油箱,主阀芯是先导式控制阀,其具有先导腔,每一工作联还包括与主阀芯的先导腔连接的电比例阀,根据电比例阀的通断,调节主阀芯位置,从而改变管路连接使液压油供给到同一工作联的不同输出口或者回流到油箱;
18、工作模式1具体为:当排涝位置是排涝机器人能够到达的位置时,液压控制系统的用于控制行走机构的工作联中的电比例阀通电,且该用于控制行走机构的每一工作联均有一个电比例阀通电,控制行走机构动作,从而行走机构带动排涝机器人达到排涝位置;用于控制行走机构的所有工作联中的电比例阀均断电,行走机构停止,用于控制液压油缸的工作联中的其中一个电比例阀通电直至主水泵下降到工作位置,该用于控制液压油缸的工作联中的电比例阀断电,用于控制主水泵的工作联中的电比例阀通电,从而驱动主水泵进行排涝工作;排涝完成后,该用于控制主水泵的工作联中关的电比例阀断电。
19、工作模式2具体为:当排涝位置是排涝机器人无法到达的位置时,根据排涝需求选择相应的外接水泵功率及数量,将该外接水泵插接到排涝机器人的外接接口上,控制相应的工作联的电比例阀通电,驱动该外接水泵进行排涝作业,排涝完成后,关闭该相应工作联的电比例阀。
20、工作模式3具体为:当需要清除障碍物时,根据障碍物的类型选择外部液压设备,将该外部液压设备插接到排涝机器人的外接接口上,控制相应的工作联的电比例阀通电,驱动该外部液压设备进行清除障碍作业,障碍清除完成后,关闭该相应工作联的电比例阀。
21、工作模式4具体为:当需要通风换气时,外部液压设备为液压风机,将液压风机插接到排涝机器人的外接接口,并将通风管道连接到需要通风换气的位置,控制相应的工作联的电比例阀通电,驱动该液压风机进行通风换气工作,通风换气完成后,关闭该相应工作联的电比例阀。
22、本发明通过在排涝机器人的主体上设置外接接口,从而将外部液压设备与排涝机器人通过液压油管连接,增加排涝机器人的功能,使排涝机器人适用于多种应急救援场景,从而使排涝机器人在完成抽水排涝工作的基础上还能够进行清除障碍物或者通风换气等工作,避免因为障碍物或者空气不流通而影响排涝机器人的工作效率。
- 还没有人留言评论。精彩留言会获得点赞!