一种能自适应调节吸盘高度的清扫车的制作方法
本技术涉及环卫清扫车,特别涉及一种能自适应调节吸盘高度的清扫车。
背景技术:
1、吸扫式清扫车作业过程中吸盘系统一般是通过2~4个滚轮托起,并利用重力或者弹簧的机械约束实现吸盘系统平整落在地面上,当吸盘系统与路面接触力不足时,就会影响吸盘系统的吸附效果,当吸盘系统与路面接触力过大时,会导致脚轮磨损严重,由于地表面往往起伏不平,吸盘系统未能感知前方路面情况,地面的凸起容易撞击到装置,给装置带来很大的冲击,损坏装置。
技术实现思路
1、本实用新型的目的在于克服上述现有技术中存在的缺点,提供能自适应调节吸盘高度的清扫车,可解决上述现有技术中吸盘系统未能感知前方路面情况,不能根据地表情况,自适应地调节吸盘高度等问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种能自适应调节吸盘高度的清扫车,包括车架、扫盘机构、吸盘机构、传感组件和控制器,所述传感组件包括第一传感器和第二传感器,所述扫盘机构安设于车架前方两侧,所述扫盘机构通过扫盘臂与车架连接,当清扫车移动时,该扫盘机构与高低不平的地面抵触并相对于车架发生跳动,所述第一传感器安装于扫盘臂位置用于实时监测扫盘机构跳动距离、并将监测信号传递至控制器,所述吸盘机构安设于车架下方,所述吸盘机构通过悬挂调节件与车架连接,所述控制器控制悬挂调节件自适应地调节吸盘机构高度,所述第二传感器安设于悬挂调节件上、用于实时监测吸盘机构落地情况。
3、作为上述技术方案的进一步改进:
4、所述悬挂调节件包括调节件和悬挂件,所述悬挂件的一端转动连接在车架中部,所述悬挂件的另一端与吸盘机构连接,所述调节件的一端与车架顶部连接,另一端与悬挂件连接,所述调节件驱使悬挂件旋转、调节吸盘机构与地面高度,所述第二传感器安装于调节件和悬挂件的连接处、用于实时监吸盘机构落地情况。
5、所述调节件为电动推杆,所述电动推杆的一端与车架顶部转动连接,所述电动推杆的另一端与悬挂件转动连接,所述第二传感器安装于电动推杆伸出端、根据电动推杆反馈的作用力实时监吸盘机构落地情况。
6、所述悬挂件包括转动轴、转动臂、刚性连接件和柔性连接件,所述转动轴通过转动座转动连接在车架中部,所述刚性连接件活动连接在转动轴的两端,所述刚性连接件另一端与柔性连接件连接,所述柔性连接件远离刚性连接件一端连接吸盘机构,所述转动臂的一端活动转接在车架内侧壁上,所述转动臂另一端与吸盘机构活动连接。
7、所述刚性连接件包括螺纹筒和螺栓,所述螺纹筒和螺栓螺合连接。
8、所述柔性连接件为不锈钢链条。
9、所述转动轴上固装有第一耳板和第二耳板,所述电动推杆通过第一耳板与转动轴活动连接,所述刚性连接件通过第二耳板与转动轴活动连接。
10、所述吸盘机构包括吸盘本体、安装座和脚轮,所述吸盘本体固装于安装座上,所述脚轮分布在吸盘本体外侧,所述转动臂和柔性连接件均与安装座连接。
11、所述扫盘臂的一端与车架外侧壁活动连接,所述车架与扫盘臂之间连接有拉簧。
12、所述第一传感器通过l型板安装于扫盘臂下侧。
13、与现有技术相比,本实用新型的有益效果是:本实用新型设置有第一传感器用来监测前方的扫盘机构跳动情况,第一传感作为先导检测,及时了解前方路面起伏情况,并将监测信息及时反馈给控制器,控制器通过计算、分析,并控制悬挂调节件,悬挂调节件对吸盘机构与地面之间的距离进行调节,从而实现吸盘机构更好的贴合地面,实现吸盘机构升降自动化,保证吸盘机构不会被冲撞,大大降低脚轮磨损,同时第二传感器监测吸盘机构落地情况,确保吸盘机构高度调整到位。
技术特征:
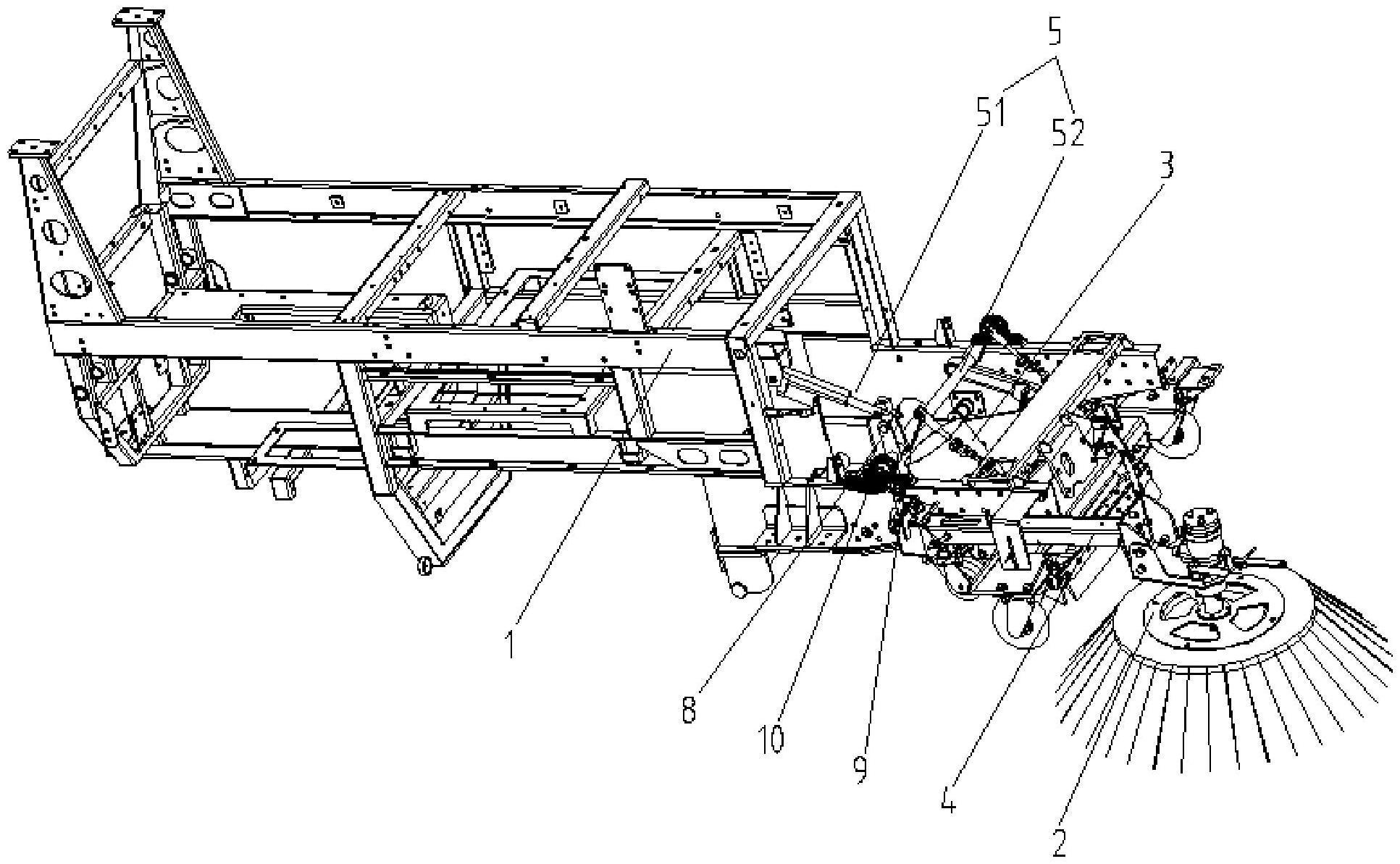
1.一种能自适应调节吸盘高度的清扫车,其特征在于,包括车架(1)、扫盘机构(2)、吸盘机构(3)、传感组件(6)和控制器(7),所述传感组件(6)包括第一传感器(61)和第二传感器(62),所述扫盘机构(2)安设于车架(1)前方两侧,所述扫盘机构(2)通过扫盘臂(4)与车架(1)连接,当清扫车移动时,该扫盘机构(2)与高低不平的地面抵触并相对于车架(1)发生跳动,所述第一传感器(61)安装于扫盘臂(4)位置用于实时监测扫盘机构(2)跳动距离、并将监测信号传递至控制器(7),所述吸盘机构(3)安设于车架(1)下方,所述吸盘机构(3)通过悬挂调节件(5)与车架(1)连接,所述控制器(7)控制悬挂调节件(5)自适应地调节吸盘机构(3)高度,所述第二传感器(62)安设于悬挂调节件(5)上、用于实时监测吸盘机构(3)落地情况。
2.根据权利要求1所述的能自适应调节吸盘高度的清扫车,其特征在于,所述悬挂调节件(5)包括调节件(51)和悬挂件(52),所述悬挂件(52)的一端转动连接在车架(1)中部,所述悬挂件(52)的另一端与吸盘机构(3)连接,所述调节件(51)的一端与车架(1)顶部连接,另一端与悬挂件(52)连接,所述调节件(51)驱使悬挂件(52)旋转、调节吸盘机构(3)与地面高度,所述第二传感器(62)安装于调节件(51)和悬挂件(52)的连接处、用于实时监吸盘机构(3)落地情况。
3.根据权利要求2所述的能自适应调节吸盘高度的清扫车,其特征在于,所述调节件(51)为电动推杆,所述电动推杆的一端与车架(1)顶部转动连接,所述电动推杆的另一端与悬挂件(52)转动连接,所述第二传感器(62)安装于电动推杆伸出端、根据电动推杆反馈的作用力实时监吸盘机构(3)落地情况。
4.根据权利要求3所述的能自适应调节吸盘高度的清扫车,其特征在于,所述悬挂件(52)包括转动轴(521)、转动臂(522)、刚性连接件(523)和柔性连接件(524),所述转动轴(521)通过转动座(525)转动连接在车架(1)中部,所述刚性连接件(523)活动连接在转动轴(521)的两端,所述刚性连接件(523)另一端与柔性连接件(524)连接,所述柔性连接件(524)远离刚性连接件(523)一端连接吸盘机构(3),所述转动臂(522)的一端活动转接在车架(1)内侧壁上,所述转动臂(522)另一端与吸盘机构(3)活动连接。
5.根据权利要求4所述的能自适应调节吸盘高度的清扫车,其特征在于,所述刚性连接件(523)包括螺纹筒和螺栓,所述螺纹筒和螺栓螺合连接。
6.根据权利要求5所述的能自适应调节吸盘高度的清扫车,其特征在于,所述柔性连接件(524)为不锈钢链条。
7.根据权利要求6所述的能自适应调节吸盘高度的清扫车,其特征在于,所述转动轴(521)上固装有第一耳板(8)和第二耳板(9),所述电动推杆通过第一耳板(8)与转动轴(521)活动连接,所述刚性连接件(523)通过第二耳板(9)与转动轴(521)活动连接。
8.根据权利要求7所述的能自适应调节吸盘高度的清扫车,其特征在于,所述吸盘机构(3)包括吸盘本体(31)、安装座(32)和脚轮(33),所述吸盘本体(31)固装于安装座(32)上,所述脚轮(33)分布在吸盘本体(31)外侧,所述转动臂(522)和柔性连接件(524)均与安装座(32)连接。
9.根据权利要求1-8中任一项所述的能自适应调节吸盘高度的清扫车,其特征在于,所述扫盘臂(4)的一端与车架(1)外侧壁活动连接,所述车架(1)与扫盘臂(4)之间连接有拉簧(10)。
10.根据权利要求1-8中任一顶所述的能自适应调节吸盘高度的清扫车,其特征在于,所述第一传感器(61)通过l型板安装于扫盘臂(4)下侧。
技术总结
本技术公开了一种能自适应调节吸盘高度的清扫车,包括车架、扫盘机构、吸盘机构、传感组件和控制器,传感组件包括第一传感器和第二传感器,扫盘机构通过扫盘臂安装在车架前方两侧,当清扫车移动时,该扫盘机构与高低不平的地面抵触并相对于车架发生跳动,第一传感器安装于扫盘臂位置用于实时监测扫盘机构跳动距离、并将监测信号传递至控制器,吸盘机构通过悬挂调节件安设于车架下方,控制器控制悬挂调节件自适应地调节吸盘机构高度,第二传感器安设于悬挂调节件上。设置第一传感作为先导检测,及时了解前方路面起伏情况,并将监测信息及时反馈给控制器,控制器计算、分析后控制悬挂调节件对吸盘机构高度调节,实现吸盘机构更好的贴合地面。
技术研发人员:阳衡,刘刚,魏思远,刘铁刚
受保护的技术使用者:纽恩驰(湖南)智能装备有限公司
技术研发日:20230419
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!