机械手臂的定位精度量测系统与方法与流程
1.本发明涉及一种定位精度的量测技术,尤其涉及一种机械手臂的定位精度量测系统与方法。
背景技术:
2.机械手臂已应用许多领域中,例如零件装配或是半导体晶圆的夹取等。然而机械手臂的终端必须具备一定的精度,以避免加工的过程中因误差过大而对产品造成损伤或降低产品的良率。
3.目前已有多种用于机械手臂终端的定位校正技术,例如激光干涉仪、激光追踪仪、影像感应器以及激光十字定位技术。激光干涉仪一次仅可量测三度空间中的一轴的定位精度,而有操作耗时的问题。激光追踪仪具有高度可携性以及定位精度的量测快速且准确的特性,然而却有硬件成本过高的问题。影像感应器有单一摄影机与三维摄影机两种,单一摄影机仅可撷取三度空间中两轴的信息,而三维摄影机所需的软硬件成本甚高。激光十字定位技术具有高精度,然而却有量测耗时且软硬件成本过高的问题。
4.另一方面,机械手臂若能在使用过程中即时量测定位精度,就可即时对机械手臂做校正而无须停机。上述定位校正技术中仅有影像感应器可在机械手臂的使用过程中侦测定位精度,然而影像感应器在使用过程中却会产生润滑油的油污。
技术实现要素:
5.本发明提供了一种机械手臂的定位精度量测系统与方法,可准确且快速地同时量测机械手臂在立体空间中的定位精度,且可在不产生污染下在机械手臂的操作过程中使用。
6.本发明所提供的机械手臂的定位精度量测系统包括机械手臂、计算装置、机械手臂控制装置、第一磁性元件以及第二磁性元件。机械手臂控制装置电性连接于机械手臂与计算装置。第一磁性元件配置在机械手臂上。第二磁性元件配置在固定平台上。第一磁性元件与第二磁性元件的其中之一电性连接于计算装置。机械手臂控制装置配置为控制机械手臂,以将第一磁性元件移动到第二磁性元件上而产生磁场,并使第一磁性元件在第二磁性元件上移动。计算装置配置为计算出第一磁性元件在磁场中的多笔移动误差信息,并通过统计移动误差信息而得到机械手臂的定位精度。
7.本发明所提供的机械手臂的定位精度方法包括以下步骤。
8.a.提供第一磁性元件,第一磁性元件设置于机械手臂上。
9.b.提供第二磁性元件,第二磁性元件设置在固定平台。
10.c.提供计算装置与机械手臂控制装置,计算装置电性连接于第一磁性元件与第二磁性元件的其中之一,机械手臂控制装置电性连接于机械手臂与计算装置。
11.d.通过机械手臂控制装置控制机械手臂,以将第一磁性元件移动到第二磁性元件上,以产生磁场。
12.e.通过机械手臂控制装置控制机械手臂,以使第一磁性元件于第二磁性元件上移动。
13.f.通过计算装置根据第一磁性元件的移动计算出第一磁性元件的多笔移动误差信息,再通过统计移动误差信息而得到机械手臂的定位精度。
14.在本发明的一实施例中,机械手臂具有操作端,且于操作端上设置有端部执行器,第一磁性元件是固定在端部执行器上。
15.在本发明的一实施例中,第一磁性元件为磁性探棒,第二磁性元件为阵列式霍尔传感器且电性连接于计算装置。
16.在本发明的一实施例中,第二磁性元件为磁性探棒,第一磁性元件为阵列式霍尔传感器且电性连接于计算装置。
17.在本发明的一实施例中,机械手臂包括多个转动连接的轴体,第一磁性元件是设置在这些轴体中最末端的一个上。
18.在本发明的一实施例中,机械手臂的定位精度量测系统更包括适于显示第一磁性元件或第二磁性元件在磁场中的位置的显示介面。
19.在本发明的一实施例中,产生移动误差信息的步骤包括:将第一磁性元件移动到第二磁性元件上的一个初始点;以及反复将第一磁性元件移开初始点再移回初始点。
20.本发明实施例的机械手臂的定位精度量测系统与方法是在机械手臂与一个固定平台之间设置第一磁性元件与第二磁性元件,通过第一磁性元件与第二磁性元件所产生的磁场可快速且准确地量测机械手臂的操作端在三度空间中的三轴的移动信息,藉此提供补偿信息。此外,本发明实施例的机械手臂的定位精度量测系统与方法可在机械手臂的操作过程中使用,而不会产生例如油污的污染。
21.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其他目的、特征和优点能够更明显易懂,以下特举较佳实施例,并配合附图,详细说明如下。
附图说明
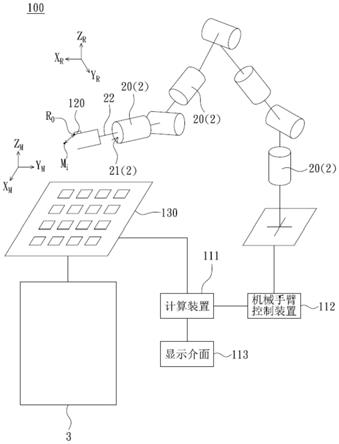
22.图1a为本发明一实施例的机械手臂的定位精度量测系统示意图。
23.图1b为本发明一实施例求取机械手臂与固定平台间的坐标系统的变换矩阵示意图。
24.图2为本发明另一实施例的机械手臂的定位精度量测系统示意图。
25.图3为本发明另一实施例的机械手臂的定位精度量测系统示意图。
26.图4为本发明一实施例的机械手臂的定位精度量测方法的流程示意图。
具体实施方式
27.图1a为本发明一实施例的机械手臂的定位精度量测系统示意图,图1b为本发明一实施例求取机械手臂与固定平台间的坐标系统的变换矩阵示意图。请参照图1a与图1b,本实施例的机械手臂的定位精度量测系统100包括机械手臂2、计算装置111、机械手臂控制装置112、第一磁性元件120以及第二磁性元件130,以量测机械手臂2的操作端21的定位精度。
28.机械手臂控制装置112电性连接于机械手臂2与计算装置111。第一磁性元件120配
置在机械手臂2上。第二磁性元件130配置在一个固定平台3上。第一磁性元件120与第二磁性元件130的其中之一可电性连接于计算装置111。在本实施例中,机械手臂2在操作端21设有端部执行器(end effector)22,而第一磁性元件120为磁性探棒且设置于端部执行器22上。另一方面,机械手臂2可包括多个转动连接的轴体20,端部执行器22是设置在这些轴体20中最末端的一个上。配置在固定平台3上的第二磁性元件130为阵列式霍尔传感器且电性连接于计算装置111。在本实施例中,绘示于图1a的端部执行器22为一夹爪,但并不仅限于此。
29.在本实施例中,计算装置111电性连接于第二磁性元件130,以接收第二磁性元件130与第一磁性元件120所产生的磁场的信号,并通过具有演算法的程序得到第一磁性元件120在磁场中的位置。机械手臂控制装置112电性连接于计算装置111与机械手臂2,以接收来自计算装置111的指令来控制机械手臂2移动。本实施例的机械手臂的定位精度量测系统100可更包括显示介面113。显示介面113电性连接于计算装置111,以显示第一磁性元件120在磁场中的位置。计算装置111可为计算机或微型计算机,机械手臂控制装置112可驱动与控制机械手臂2,通常包括电控箱(图未示)以及电性连接于电控箱的教导器(图未示),而显示介面113则可为屏幕,但并不仅限于此。
30.机械手臂控制装置112配置为控制机械手臂2,以将第一磁性元件120移动到第二磁性元件130上而产生磁场,并使第一磁性元件120在第二磁性元件130上移动。计算装置111配置为计算出第一磁性元件120在磁场中的多笔移动误差信息,并通过统计移动误差信息而得到机械手臂2的定位精度。在本实施例中,设有第一磁性元件120的端部执行器22的坐标系统包括xr、yr与zr三轴,固定平台3的坐标系统包括xm、ym与zm三轴。机械手臂控制装置112可控制机械手臂2在磁场的范围中往复移动,例如在图1a中,先通过机械手臂控制装置112控制机械手臂2,以使第一磁性元件120(磁性探棒)移动到第二磁性元件130(阵列式霍尔传感器)的中心上且相对端部执行器22的坐标系统的一个初始位置r0,再由机械手臂控制装置112继续控制机械手臂2,反复地将第一磁性元件120移开初始位置r0,再移回初始位置r0,然而由于机械手臂2的移动误差,第一磁性元件120并无法精准地移回初始位置r0,而会移动到r0附近的位置,假设移动了n次,而每次分别移动到相对固定平面3的坐标系统的位置mi,,其中i=1-n,单次的移动误差信息则为ami-r0,其中a为用于将端部执行器22的坐标系统变换至固定平面3的坐标系统的变换矩阵。而通过计算装置111统计第一磁性元件120在磁场中的多笔移动误差信息,可得机械手臂2的操作端21的定位精度。
31.如图1b所示,有关如何求取变换矩阵a,可通过机械手臂控制装置112控制机械手臂2,以使第一磁性元件120沿着xr轴移动dxr(xru,0,0)的距离、沿着yr轴移动dyr(0,yrv,0)的距离以及沿着zr轴移动dzr(0,0,zrw)的距离。对于固定平台3的坐标系统而言,第一磁性元件120则沿着xm轴移动了u(xmu,ymu,zmu)的距离、沿着ym轴移动了v(xmv,ymv,zmv)的距离以及沿着zm轴移动了w(xmw,ymw,zmw)的距离。在距离dxr、dyr以及dzr已知加上距离u、v以及w可测得下,可求得端部执行器22相对固定平台3的变换矩阵a。
32.本实施例的机械手臂的定位精度量测系统100可在机械手臂2的端部执行器22执行任务前通过上述检测方法进行定位精度的检测,当发现机械手臂2的定位精度不足时,使用者可通过机械手臂控制装置112对机械手臂2的移动作补偿,而当定位精度过低而无法通过补偿对机械手臂2的移动进行修正时,则可考虑检修或更换机械手臂2。
33.本实施例的机械手臂的定位精度量测系统100是在机械手臂2与一个固定平台3之间设置第一磁性元件120与第二磁性元件130,通过第一磁性元件120与第二磁性元件130所产生的磁场可快速且准确地量测机械手臂2的操作端21在立体空间中的移动误差信息,藉此提供补偿信息。此外,本发明实施例的机械手臂的定位精度量测系统与方法可在机械手臂2的操作过程中使用,而不会产生例如油污之类的污染。
34.图2为本发明另一实施例的机械手臂的定位精度量测系统示意图。请参照图2,本实施例的定位精度量测系统100a与图1a的实施例大致相同,不同处在于本实施例的第一磁性元件120a为设置在机械手臂2的阵列式霍尔传感器,且电性连接于计算装置111,而第二磁性元件130a为设置在固定平台3上的磁性探棒。另外,在本实施例中,为阵列式霍尔传感器的第一磁性元件120a是设置于轴体20,不同于图1a实施例中为磁性探棒的第一磁性元件120是结合于端部执行器22。在本实施例中,计算装置111电性连接于第一磁性元件120a,用以接收第一磁性元件120a与第二磁性元件130a所产生的磁场的信号,并通过具有演算法的程序得到第二磁性元件130a在磁场中的位置。所使用的演算法可包括各种相关变数求解数学式,例如齐次变换矩阵或回归算法,或包括资料训练模型方式例如类神经网路、反传递、ann、cnn或rnn,但并不仅限于此。
35.图3为本发明另一实施例的机械手臂的定位精度量测系统示意图。请参照图3,本实施例的定位精度量测系统100b与图1a的实施例大致相同,不同处在于本实施例的第一磁性元件120b为设置在机械手臂2的阵列式霍尔传感器且电性连接于计算装置111,而第二磁性元件130b为设置在固定平台3上的磁性探棒。另外,在本实施例中,为阵列式霍尔传感器的第一磁性元件120b与图1a实施例中为磁性探棒的第一磁性元件120同样地是结合于端部执行器22。较佳地,本实施例的端部执行器22为夹爪。
36.图4为本发明一实施例的机械手臂的定位精度量测方法的流程示意图。请参照图4,本实施例的机械手臂的定位精度方法包括以下步骤:
37.如步骤s401,提供第一磁性元件,且第一磁性元件设置于机械手臂上。机械手臂可为图1a的机械手臂2,而第一磁性元件可为图1a的第一磁性元件120、图2的第一磁性元件120a或图3的第一磁性元件120b。
38.如步骤s402,提供第二磁性元件,第二磁性元件设置在固定平台。固定平台可为图1a的固定平台3,第二磁性元件可为图1a的第二磁性元件130、图2的第二磁性元件130a或图3的第二磁性元件130b。
39.如步骤s403,提供计算装置与机械手臂控制装置,计算装置电性连接于第一磁性元件与第二磁性元件的其中之一,机械手臂控制装置电性连接于机械手臂与计算装置。在图1a中,计算装置111电性连接于第二磁性元件130,而在图2与图3中,计算装置111分别电性连接于第一磁性元件120a与第一磁性元件120b。
40.如步骤s404,通过机械手臂控制装置控制机械手臂,以将第一磁性元件移动到第二磁性元件上,以产生磁场。在图1a中,是移动为磁性探棒的第一磁性元件120。在图2中,是移动为阵列式霍尔传感器的第一磁性元件120a。在图3中,是移动为阵列式霍尔传感器的第一磁性元件120b。
41.如步骤s405,通过机械手臂控制装置控制机械手臂,以使第一磁性元件于第二磁性元件上移动。例如图1a中的机械手臂控制装置112控制机械手臂2,以使第一磁性元件120
移动到第二磁性元件130上的一个初始点r0;以及反复将第一磁性元件120移开初始点r0再移回初始点r0。
42.如步骤s406,通过计算装置根据第一磁性元件的移动计算出第一磁性元件的多笔移动误差信息,再通过统计移动误差信息而得到机械手臂的定位精度。例如图1a中的计算装置111计算出多笔ami-r0的移动误差信息,再以演算法统计这些移动误差信息,而得到机械手臂2的定位精度。
43.本发明实施例的机械手臂的定位精度量测系统与方法是在机械手臂与一个固定平台之间设置第一磁性元件与第二磁性元件,通过第一磁性元件与第二磁性元件所产生的磁场可快速且准确地量测机械手臂的操作端在立体空间中的移动信息,藉此提供补偿信息。此外,本发明实施例的机械手臂的定位精度量测系统与方法可在机械手臂的操作过程中使用,而不会产生例如油污的污染。
44.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的方法及技术内容作出些许的更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1