一种自控式同步切制机的制作方法
1.本发明涉及一种自控式同步切制机,属于炊事机械技术领域。
背景技术:
2.切制机是切制蔬菜机械的主要设备之一,现国内、外市场上生产的切菜机,都是手动操作来实现不同规格、不同蔬菜所需切菜速度和切菜长度的调整,操作相对比较麻烦,不容易调整到理想的速度和长度,费时费力,近年来蔬菜行业之间的竞争日益激烈,劳力费用越来越高,蔬菜行业的利润也随之降低,现市场急需一种自动化程度高、安全性能高、效率高等方面的蔬菜加工机械,以满足人们对智能数字控制、自动化安全卫生、绿色环保等方面的需求。
技术实现要素:
3.本发明所要解决的技术问题是针对现有技术存在的缺陷,提供一种自控式同步切制机。
4.为解决这一技术问题,本发明提供了一种自控式同步切制机,包括机架、输送部分、压菜部分、切刀部分、切刀传动部分及电器控制部分;所述输送部分、压菜部分、切刀部分及电器控制部分设置在机架上部;所述机架一侧安装介轮轴固定板,介轮轴固定在介轮轴固定板上,介链轮与介齿轮为一组合整体结构、共同安装在介轮轴上、可绕介轮轴转动;所述伺服电机通过伺服电机固定板安装在机架内部,伺服电机通过伺服电机轮、皮带二及输送主动辊轮将动力传给输送部分;所述输送部分通过输送主动辊链轮、链条、介链轮、介齿轮、压菜主动辊齿轮将动力传给压菜部分,带动压菜主动辊、压菜带与输送带反向、同速转动,使切制物料在压菜带与输送带的共同作用下向前输送;所述机架内部设有切刀传动部分及电动机,所述切刀传动部分包括前轴、支座、偏心、小轴和接头;电动机通过电机轮、皮带一和大槽轮将动力传给切刀传动部分的前轴;所述切刀部分与接头连接,前轴依次通过偏心、小轴和接头带动切刀部分上下往复运动,对通过压菜带与输送带的共同作用下向前输送的切制物料进行切制。
5.所述切刀部分包括切刀、刀架、导柱、摆杆焊合和螺柱,所述摆杆焊合两端与导柱铰链,螺柱一端与摆杆焊合连接固定,另一端与接头连接固定;所述切刀传动部分通过接头与螺柱带动刀架、切刀上下往复运动;所述机架上部设置有导套;导柱在导套内实现导向。
6.所述输送部分包括输送主动辊、轴承座、输送后辊筒、输送带、螺杆座和调整螺杆;所述输送主动辊的轴端设有输送主动辊链轮、输送主动辊轮,所述输送主动辊通过轴承座安装在机架一侧;伺服电机将动力传递给输送主动辊轮,进而通过输送主动辊带动输送带实现输送。
7.所述压菜部分包括压菜前辊筒、压菜带、压菜带支板、弹簧、压菜主动辊和铰轴,所述铰轴安装在机架上,所述铰轴的即为压菜部分旋转中心,压菜部分可绕压菜部分旋转中心转动,所述压菜带与输送带的压紧力通过弹簧实现;所述压菜主动辊、压菜前辊筒安装在
压菜带支板上。
8.所述机架内部设置有光电开关,摆杆焊合35的轴端设有光电开关板;所述切刀部分的摆杆焊合、导柱、刀架、切刀作上下往复运动时,带动光电开关板上下往复运动,当向上运动到切刀不切菜,光电开关脱离光电开关板,伺服电机开始转动,带动输送带运动,当切刀向下运动到切菜时,在光电开关感应到光电开关板前,发出信号,伺服电机受此信号控制停止转动,即输送带停止运动,伺服电机与光电开关相结合,实现输送带间歇运动与切刀往复运动的同步运动,即输送带停止时,切刀切到输送带上切菜,切刀运行至高点时,输送带快速运行一定距离。
9.所述电器控制部分为整个切制机智能控制系统,控制伺服输送与光电感应,实现输送间歇运动与往复运动切刀的同步运动及数字智能,控制变频调速机构,实现切刀往复频率调节, plc控制自动调整间歇输送与切制速度的同步运转,实现不同长短物料的切制。
10.所述自控式同步切制机还包括人机交互界面,使用时,从人机交互界面输入切段长度数据,按启动后,电器控制系统自动控制输送带间歇运动的距离与输入的数据相同,将待切制的根、茎类物料料筒切片或直接菜料放置在输送带上时,物料在输送带与压菜带的共同作用下,将物料间歇输送一定距离,切刀将物料切制成一定长度的制品,实现数字化切制。
11.有益效果:本发明利用伺服输送与光电感应相结合,实现输送带间歇运动与切刀往复运动的同步运动,实现切段的长段及数字智能控制;通过变频调速机构实现切刀往复频率调节;机构通过plc控制,自动调整间歇输送与切制速度的同步运转,实现不同长短物料的切制,操作方便,真正实现了切段长度的数字化控制。该机自动化程度高、安全性能高、效率高,满足了人们对智能数字控制、自动化安全卫生、绿色环保等方面的需求,从而优化升级产业结构,提高公司的核心竞争力。
附图说明
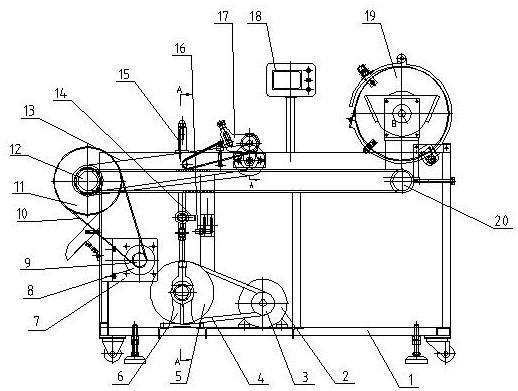
12.图1为本发明的结构示意图a;图2为本发明的结构示意图b;图3为本发明图1的a-a剖视示意图;图4为本发明输送部分传动示意图;图5为本发明切刀最高点位置示意图;图6为本发明切刀最低点位置示意图。
13.图中:1机架、2电动机、3电机轮、4皮带一、5大槽轮、6切刀传动部分、7伺服电机固定板、8伺服电机、9伺服电机轮、10皮带二、11输送主动辊轮、12输送部分、13链条、14光电开关板、15切刀部分、16光电开关、17压菜部分、18电器控制部分、19料筒、20输送后辊筒、21输送主动辊链轮、22压菜前辊筒、23压菜带、24压菜带支板、25弹簧、26介链轮、27压菜主动辊齿轮、28压菜主动辊、29介齿轮、30压菜部分旋转中心、31输送带、32小轴、33接头、34螺柱、35摆杆焊合、36导柱、37导套、38刀架、39切刀、40前轴、41支座、42偏心、43轴承座、44输送主动辊、45螺杆座、46调整螺杆、47铰轴、48介轮轴、49介轮轴固定板。
具体实施方式
14.下面结合附图及实施例对本发明做具体描述。
15.图1所示为本发明的结构示意图a。
16.图2所示为本发明的结构示意图b。
17.图3所示为本发明图1的a-a剖视示意图。
18.本发明提供了一种自控式同步切制机,包括机架1、输送部分12、压菜部分17、切刀部分15、切刀传动部分6及电器控制部分18;所述输送部分12、压菜部分17、切刀部分15及电器控制部分18设置在机架上部;所述机架1一侧安装介轮轴固定板49,介轮轴48固定在介轮轴固定板49上,介链轮26与介齿轮29为一组合整体结构、共同安装在介轮轴48上、可绕介轮轴48转动;所述伺服电机8通过伺服电机固定板7安装在机架1内部,伺服电机8通过伺服电机轮9、皮带二10及输送主动辊轮11将动力传给输送部分12;所述输送部分12通过输送主动辊链轮21、链条13、介链轮26、介齿轮29、压菜主动辊齿轮27将动力传给压菜部分17,带动压菜主动辊28、压菜带23与输送带31反向、同速转动,使切制物料在压菜带23与输送带31的共同作用下向前输送;所述机架1内部设有切刀传动部分6及电动机2,所述切刀传动部分6包括前轴40、支座41、偏心42、小轴32和接头33;电动机2通过电机轮3、皮带一4和大槽轮5将动力传给切刀传动部分6的前轴40;所述切刀部分15与接头33连接,前轴40依次通过偏心42、小轴32和接头33带动切刀部分15上下往复运动,对通过压菜带23与输送带31的共同作用下向前输送的切制物料进行切制。
19.所述切刀部分15包括切刀39、刀架38、导柱36、摆杆焊合35和螺柱34,所述摆杆焊合35两端与导柱36铰链,螺柱34一端与摆杆焊合35连接固定,另一端与接头33连接固定;所述切刀传动部分6通过接头33与螺柱34带动刀架38、切刀39上下往复运动;所述机架1上部设置有导套37;导柱36在导套37内实现导向。
20.图4所示为本发明输送部分传动示意图。
21.所述输送部分12包括输送主动辊44 、轴承座43、输送后辊筒20、输送带31、螺杆座45和调整螺杆46;所述输送主动辊44的轴端设有输送主动辊链轮21、输送主动辊轮11,所述输送主动辊44通过轴承座43安装在机架1一侧;伺服电机8将动力传递给输送主动辊轮11,进而通过输送主动辊44带动输送带31实现输送。
22.所述压菜部分17包括压菜前辊筒22、压菜带23、压菜带支板24、弹簧25和压菜主动辊28,压菜部分17可绕压菜部分旋转中心30转动,所述压菜带23与输送带31的压紧力通过弹簧25实现;所述压菜主动辊28、压菜前辊筒22安装在压菜带支板24上。
23.图5所示为本发明切刀最高点位置示意图。
24.图6所示为本发明切刀最低点位置示意图。
25.所述机架1内部设置有光电开关16,摆杆焊合35的轴端设有光电开关板14;所述切刀部分15的摆杆焊合35、导柱36、刀架38、切刀39作上下往复运动时,带动光电开关板14上下往复运动,当向上运动到切刀39不切菜时,光电开关16脱离光电开关板14,伺服电机8开始转动,带动输送带31运动,当切刀39向下运动到切菜时,在光电开关16感应到光电开关板14前,发出信号,伺服电机8受此信号控制停止转动,即输送带31停止运动,伺服电机8与光电开关16相结合,实现输送带31间歇运动与切刀39往复运动的同步运动,即输送带31停止时,切刀39切到输送带31上切菜,切刀39运行至高点时,输送带31快速运行一定距离。
26.所述电器控制部分18为整个切制机智能控制系统,控制伺服输送与光电感应,实现输送间歇运动与往复运动切刀的同步运动及数字智能,控制变频调速机构,实现切刀往复频率调节, plc控制自动调整间歇输送与切制速度的同步运转,实现不同长短物料的切制。
27.所述自控式同步切制机还包括人机交互界面,使用时,从人机交互界面输入切段长度数据,按启动后,电器控制系统18自动控制输送带31间歇运动的距离与输入的数据相同,将待切制物料放置在输送带31上,物料在输送带31与压菜带23的共同作用下,将物料间歇输送一定距离,切刀39将物料切制成一定长度的制品,实现数字化切制。
28.本发明的工作原理及工作过程:在切段的时候,变频器控制切刀30的往复运动速度,伺服电机8根据切刀的动作来进行快速的响应,通过皮带二10带动输送带31间歇运行,当切刀30到达光电开关16检测的位置时,输送带31停止运行,等待切菜;当切刀31离开检测位置时,即感应不到光电开关16时,伺服电机8根据设定的切段长度,输送带31运行相应的距离,运行完后,切刀31进行切断动作。
29.本发明利用伺服输送与光电传感器相结合,实现输送带间歇运动与往复运动切刀的同步运动,实现切段长度的数字智能控制;应用plc控制输送带31与切刀39往复运动同步性;切段的时候,内部电器控制切刀39的速度,伺服电机8根据切刀39的动作来进行快速的响应,通过皮带二10带动输送带31间歇运行,当光电开关板14到达光电开关16位置时,输送带31停止运行,等待切菜,当光电开关板14离开光电开关16位置时,输送带31来行走相应的距离,距离走完后等待切刀39进行切段,即输送带31停止时,切刀39切到输送带上切菜,切刀39运行至高点时,输送带31快速运行一定距离,通过信息反馈,实现切段长度的数字控制;本发明上述实施方案,只是举例说明,不是仅有的,所有在本发明范围内或等同本发明的范围内的改变均被本发明包围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1