基于闭环反馈的机器人运动控制系统及方法与流程
基于闭环反馈的机器人运动控制系统及方法
1.技术领域
2.本发明涉及人工智能(ai,artificial intelligence)应用技术领域,尤其涉及一种基于闭环反馈的智能机器人运动控制系统及实现方法。
背景技术:
3.人工智能是利用计算机等现代化设备来模拟人类的思维和行动的技术,基于人工智能的机器人设备逐步进入多种行业应用领域及使用环境,以取代或替换人类在日常生活或工作中来实现各种具体操作和工作内容。智能机器人是未来ai发展的重要组成部分,机器人的运动能力包括移动,躲避障碍,抓取和摆放物体等。如何让机器设备更快速和准确的运动是衡量机器人ai程度的重要指标之一。
4.目前现有应用技术中智能机器人的运动设计是一个复杂又昂贵的开环系统(open-loop),举例来说,工业应用中机器臂的抓取是通过控制器控制机器臂上的运动装置,一次性地进行抓取。由于要避免抓取动作过冲击或是不到位,所以这个一次性的动作要非常精准到位,这就需要机器人的算法和机械部件的精密配合,而且为了实现这个精密配合,运动部件在设计上会采用到一个“减速器”的精密装置,例如谐波减速器,rv减速器(rotary vector,旋转矢量)等。这些机械结构的减速器装置目前只有德国和日本能生产,而且价格非常昂贵。所以造成机器人制造和加工成本非常高,导致价格高居不下,因此机器人进入到现实生活中应用仍有较大的距离。在现有技术领域的机器人设计应用中,公开号为cn 208966994u、名称为“一种机器人减速器及机器人”的实用新型专利文献中就公开记载了一种智能机器人及采用减速器装置来实现机器人控制应用的技术实现方案。
5.图1为现有技术中一种机器人应用的运动控制系统及其部分运动控制部件的结构示意图,如图中所示,运动控制部件130对控制设备110发送的参数进行解析,以调控和驱动运动部件140的运行。运动部件140包括电机和减速器设备,电机驱动减速器运转,实现带动机器人的机械臂装置进行各种运动控制操作。该技术方案中机器人运动控制系统通过对多个机械结构部件的驱动以分步实现运动控制,机器人运动控制过程相对复杂,效率相对较低。
6.基于上述各种问题,本发明旨在解决当前机器人设备所采用的减速器装置在应用过程中其操作控制过程耐冲击性差,以及机械装置加工难度大、成本高,且机械结构设计复杂,操作和控制效率都有待提高的问题。由此,本发明提出一种创新的闭环交互运动控制实现方式,以替代和解决现有技术中智能机器人的运动控制系统和控制实现方式。
技术实现要素:
7.本发明目的在于提供一种基于闭环反馈的机器人运动控制系统,其采用闭环交互方式实现机器人的运动控制,所述系统包括:
图像数据采集单元,所述图像数据采集单元可以是设置在机器人上的一个或多个3d(3 dimension,三维)相机,用于获取机器人的应用场景中目标物体的三维图像数据;或者是能够实现三维图像数据获取功能的一个或多个其他传感器装置;所述3d相机或者所述传感器装置可具有高帧率图像输出模式;图像数据处理单元,设置于机器人内,对图像数据采集单元获取的图像信息数据进行处理,以确定目标物体与机器人之间的位置关系数据;智能操作单元,机器人的智能机械结构装置,可以实现对目标物体进行操作控制,如抓取或其他操作控制,所述机器人的智能操作单元可以是机械臂,或者是机器人的其他智能机械结构的部件;控制处理单元,设置于机器人内,对图像处理单元反馈的位置关系数据进行分析判断处理,根据分析判断的结果确定是对所述机器人进行移动控制,或者是控制机器人的智能操作单元对目标物体进行操作;进一步地,所述控制处理单元对所述机器人的移动控制包括:移动速度,或者移动方式,或者移动速度和移动方式的控制;对所述机器人的操作控制可以根据具体应用设定,如抓取等操作动作;进一步地,所述控制处理单元根据对所述位置关系数据进行分析判断的结果确定:当目标物体与机器人的位置关系未到达设定的距位置关系时,控制机器人进行移动以进一步获取目标物体与机器人之间新的位置关系数据;当确定所述位置关系已到达设定的位置关系时,控制机器人的智能操作单元对目标物体进行操作动作;所述位置关系数据可包括距离数据或位置坐标信息数据,或者距离和位置坐标信息数据;进一步地,所述图像数据采集单元可以设置在机器人上,可以根据应用设置在机器人的不同部位上,如机器人的机械臂,或机器人的头部,或机器人的其他部件上,以实现获取所述目标物体的图像信息数据。
8.基于上述运动控制系统,本发明还提供一种基于闭环反馈的机器人运动控制方法,所述方法包括以下实现步骤:机器人的图像数据采集单元获取应用场景中目标物体的图像信息数据;对所获取的图像信息数据进行处理,获得所述机器人和所述目标物体之间的位置关系数据;对获得的所述位置关系数据进行分析判断处理,根据分析判断的结果确定对机器人进行移动控制或是操作控制;当所述机器人和所述目标物体之间的位置关系数据到达设定的位置关系时,控制所述机器人进行操作控制,完成对目标物体的操作过程,例如抓取操作;当未到达所述确定的位置关系时,对所述机器人进行移动控制,进一步获取所述目标物体与所述机器人之间新的位置关系数据;所述位置关系包括距离数据,或位置信息数据,或者距离和位置信息数据;进一步地,所述图像数据采集单元为设置于机器人上的一个或多个3d相机装置,用于获取目标物体的三维图像数据,或者是能够实现图像信息采集功能的一个或多个其他传感器装置;所述3d相机或所述传感器装置可以具有高帧率图像输出模式;进一步地,对所述机器人进行移动控制包括移动方式和/或移动速度的控制,当分析判断的结果是所述目标物体距离所述机器人较远时,加快所述机器人的移动速度;当所述目
标物体距离所述机器人较近时,降低所述机器人的移动速度;进一步地,对所述机器人进行移动控制的方式是根据闭环反馈的位置关系数据逐渐逼近目标物体的控制过程,移动控制过程中可多次获取所述目标物体与所述机器人之间新的位置关系数据;进一步地,所述图像数据采集单元可以设置在所述机器人上,根据具体的机器人应用,可设置在所述机器人的机械臂上,或者机器人的头部位置,或者机器人的其他部位上。
9.本发明提出的上述发明内容,采用创新的闭环交互式运动控制方式,机器人的图像数据采集单元采用一个或多个3d相机获取目标物体的三维图像数据,3d相机具有高帧率输出模式,且机器人的移动控制过程采取逐渐逼近的闭环反馈控制方式,因此机器人运动控制过程的效率能够得到有效提升。本发明方案把现有技术中机器人所采用的复杂的机械结构运动控制转化为设计简易,控制过程简单易实现的电子装置控制过程,使得现有技术方案中机器人运动控制精确性低,机械设计结构和控制过程复杂以及成本高等问题都得到有效解决。本发明所提供的技术解决方案有利于机器人的多种应用领域以及小型化机器人设备的发展,比如无人驾驶汽车,无人飞行器,机器狗,机器猫等,为今后的ai机器人普及应用提供了技术创新发展的前提。
附图说明
10.图1 为现有技术中一种机器人装置的运动控制系统示意图;图2 为本发明提供的基于闭环反馈的机器人运动控制系统基本框图;图3 为本发明提供的基于闭环反馈的机器人运动控制方法基本流程图;及图4 为本发明控制系统的闭环反馈控制过程示意图。
具体实施方式
11.为使本发明的实施例的目的、技术方案和优点更加清楚,下面结合本发明所提供的多个附图,对本发明实施例中的技术方案进行清楚、完整的描述。本领域技术人员可以理解的是,此处所记载的实施例是本发明能够实现的实施例中的一部分,并非穷尽全部实施例。其他多个可实现本发明技术方案的应用实施例也属于本发明所保护的内容范围内。在本专利说明书中“一个实例”,
ꢀ“
一个实施例”或者“一个应用例”指的是结合实例中描述的特定特征、结构或特性包含于本发明的至少一个实例中。因此,贯穿本说明书在不同位置中出现的短语“在一个实例中”,“在一个实施例中
”ꢀ
或“在一个应用例中”未必都是指同一个实例。此外,在一个或多个实例中,特定特征、结构或特性可以任何合适方式组合。
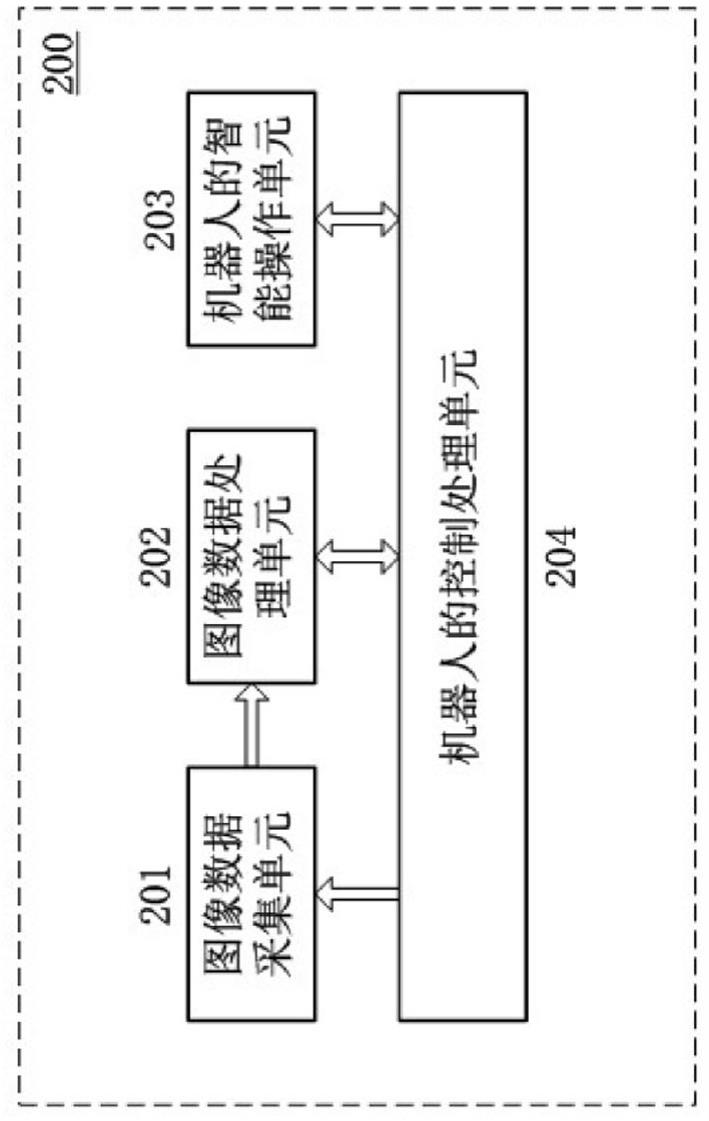
12.图2是本发明提出的基于闭环反馈的机器人运动控制系统基本框图,图2中的各功能模块及控制方式仅为示意说明运动控制系统实现的目的,并非限定机器人的运动控制系统仅包含图示中给出的几部分内容。如图2中所示,基于闭环反馈的机器人运动控制系统200包括图像数据采集单元201,图像数据处理单元202,机器人的智能操作单元203及机器人的控制处理单元204。
13.图像数据采集单元201可以为一个或者多个3d相机,设置于机器人上,实现采集机器人应用场景中的目标物体的三维图像数据,例如采集工业应用领域中生产线上饮料瓶的图像数据,或者机器人在其他应用场景中目标物体的图像数据。图像数据采集可以采用一
个3d相机,或者根据具体应用由多个3d相机组合来实现对目标物体的三维图像信息数据采集。3d相机可以设计采用多种技术实现方式,例如可以采用结构光设计的3d相机,双目立体视觉相机,或基于光飞行计算的tof(time of flight)相机等,本发明专利不对3d相机的具体设计方案构成限制,能够实现对目标物体三维图像数据采集均在本专利可实施的范围之内。3d相机可以具有高帧率的输出模式,以提高图像输出及数据反馈过程的效率,例如,其输出帧率1000fps。图像数据采集单元201还可以设计采用能够实现上述图像数据采集的其他传感器装置或几个传感器装置的组合,以实现获取目标物体的三维图像数据功能,如可以采用通过传感器及扫描装置等构成的目标物体图像数据采集单元等。可以根据具体应用环境或采集图像的不同应用需求设计采用不同方案的图像数据采集单元201,本发明应用例中所记载的3d相机装置不对图像数据采集单元的设计方案构成限制。图像处理单元202对3d相机装置所获取的目标物体的三维图像数据进行计算和处理,可以得出目标物体和机器人的之间的位置关系数据。
14.机器人的控制处理单元204对上述的位置关系数据进行分析判断并作进一步的处理,如果分析判断结果为目标物体和机器人之间的位置关系尚未达到确定的距离或位置,例如未达到预先设定好的确定距离或位置,则对机器人进行移动控制操作。对机器人的移动控制包括对其移动速度的控制及移动方式的控制,可以根据具体应用设定,当距离相对较远时加大机器人的移动速度,距离较近时可适当调整降低移动速度。还可以根据具体设计应用对机器人进行一定角度的旋转以使得机器人的智能操作单元,例如机械手与目标物体的位置关系相适应。移动控制是通过目标物体和机器人之间位置关系数据的不断更新进行闭环反馈实现逐渐逼近目标物体达到设定操作距离或位置的控制过程。这种实现方式能够有效提高机器人运动控制过程的效率,可以避免现有技术中采用一次性移动控制易出现的过冲击问题,整个操作过程效率高且运行过程平顺。目标物体和机器人之间的位置关系已到达预先设定的距离或位置时,机器人的控制处理单元204控制智能操作单元203进行操作,例如控制智能操作单元203对目标物体实现抓取等具体操作动作。智能操作单元203可以是工业机器人的智能机械臂,或是其他应用领域机器人设备的机械手,机械脚,或者其他机械结构装置。
15.本发明提出的基于闭环反馈的机器人运动控制系统采用电子装置的设计实现方案,能够替代和简化现有技术中机器人运动控制系统中复杂的机械控制结构控制,比如结构设计复杂、加工成本高、控制效率低的减速器装置和电机驱动实现对机器人运动部件的控制。本发明运动控制系统技术实现方案可以延伸应用到多种行业和应用领域的机器人装置的运动控制,比如无人驾驶汽车,无人飞机,机器狗,机器猫等及其他多种ai智能机器人设备。
16.图3是本发明提出的基于闭环反馈的机器人运动控制方法基本流程图,结合图2中给出的机器人运动控制系统,对基于闭环反馈的机器人运动控制的过程进行详细的说明。本实施例的实现方案中,由3d相机构成的图像数据采集单元安装设置在机器人上,以工业机器人应用领域中机器人机械臂作为智能操作单元作为应用实施例,工业机器人根据设定对场景中的目标物体进行抓取等操作。但本发明技术方案不限定于工业机器人应用,如果在行走类机器人应用领域,数据采集单元所包括的3d图像传感器装置或3d相机可以设置在机器人的其他功能部位上。以工业应用机器人为例,采用本发明方案所提供的机器人运动
控制方法,其具体实现过程如下:s01:获取应用场景中目标物体的图像信息数据;一个或多个3d相机设置在机器人上,根据设定来实现对应用场景中目标物体的识别和图像数据的采集,3d相机或3d图像传感器获取目标物体的三维图像数据,根据三维图像坐标数据能够计算得出目标物体的深度信息数据,以还原真实场景中目标物体的数据信息。3d相机在具体应用实施过程中可以采用基于结构光设计、双目视觉设计方案或tof光飞行时间计算的多种设计实现方式。本应用实施例中不限定所采用的3d相机技术设计方案,可以根据具体应用采用不同设计类型的3d相机形式。凡能实现上述对目标物体的三维图像数据获取结果的3d相机装置都属于本发明方案的可实施保护范围之列。为提高机器人运动控制过程的效率,3d相机可以采用高帧率输出模式,例如1000fps的输出帧率,以提高图像数据处理过程的效率。可以根据具体应用设计采用不同的图像输出模式。
17.3d相机装置可以固定设置机器人上,具体的,本应用实施例给出的方案中可以设置在在工业机器人的机械臂上,跟随机械臂的移动过程获取目标物体的图像数据。针对不同应用领域的机器人设备,用于图像数据获取的3d相机装置或3d图像传感器单元可以设置在机器人的头部,机器人的身体周围等其他合适的部位上,无人机装置的机体上等,能够实现对场景中目标物体的三维图像数据采集都满足其设置在机器人上的要求。
18.s02:对所获取的图像信息数据进行处理,获得机器人和目标物体之间的位置关系数据;机器人的图像处理单元对所获取的三维图像信息数据进行处理,通过运算可以得出机器人与目标物体之间的位置关系的数据,比如距离,角度,具体位置坐标等信息数据;s03:对获得的位置关系数据进行分析判断,根据分析判断的结果确定对机器人进行移动控制或者操作控制;控制处理单元对得到的机器人和目标物体之间的位置关系的数据进行分析判断,如果尚未到达预先设定的位置关系时,控制机器人进行移动;如果已达到设定的位置关系时,控制机器人的机械臂对目标物体进行操作,比如对饮料瓶的抓取等操作;在对机器人进行移动控制的过程中,可以根据机器人和目标物体之间获得的距离远近或位置关系进行控制,比如,当目标物体距离机器人较远时,加快机器人的移动速度;当目标物体距离机器人较近时,可以降低机器人的移动速度,这种实现方式能够合理地控制机器人的运动速度,合理优化运动控制的次数,提升移动控制过程的效率。在对机器人移动控制的过程中,可以根据具体应用对机器人进行旋转的控制方式,比如方向位移有偏差时,可以根据分析结果数据调整机器人的角度以转动控制机器人的智能操作单元准确对应于设定的位置或方向。
19.当机器人经移动控制至新的位置时,3d相机继续采集目标物体的图像信息数据,进一步获得机器人和目标物体之间新的位置关系数据,继续对新的位置关系数据进行分析判断,是否需要对机器人进行移动控制或是机器人的智能机械臂装置已可以对目标物体进行操作。如图4中所示,机器人的整个运动控制过程为根据闭环反馈数据以逐渐逼近的控制方式靠近目标物体,这种闭环反馈交互方式能够平顺且精准地完成对机器人的移动控制过程,能够避免出现移动速度过快,或者一次性的运动控制过程会带来移动距离或位置不能够到达精确操作位置的问题,能够避免出现机器人的机械臂在操作过程中的过冲击问题或
误操作问题。
20.在此步骤中,本应用实施例中所采用的工业机器人的机械臂可以固定设置在具有滑动或转动功能的支座上,该支座能够在轨道或机构上顺利移动或转动等。在其他多种可行的应用实施例中,机器人可以设计为具有行走、转身等多种功能的其他智能设备。本实施例中所述工业机器人机械臂的应用实施例的运动控制过程为示例说明的目的,不对本发明方案的运动控制具体实现过程或具体机器人应用或结构设计形式构成限制,能够通过本发明提供的技术方案顺利实现智能机器人的运动控制过程的目的均属于本发明可实施的方案保护之列。
21.s04:机器人的智能操作单元对目标物体进行操作控制;当机器人和目标物体之间的位置关系数据已达到设定的距离或位置时,控制处理单元控制机器人的机械臂或其他智能机械操作装置对目标物体进行抓取等动作,机器人的机械臂顺利完成对目标物体的操作过程。针对工业机器人领域,其机械臂应用的具体操作为抓取等动作,其他多个应用领域的机器人设备的操作控制可以为机器手操作按钮开关或者操作其他设备等。
22.本应用实施例给出的基于闭环反馈的机器人运动控制方法,与现有技术方案中机器人运动控制实现方法相比较,改进了现有技术中机器人设备复杂的机械结构部件的运动控制过程,使得整个运动控制过程更简单易操控,闭环反馈的控制过程效率更高,移动控制过程的结果精确性高,同时避免了机械结构设计加工成本高、难度大的问题,此种运动控制实现方式可以进一步简化机器人设备的运动控制装置设计结构。本发明方案的机器人运动控制方法,可以推广适于多种ai设备的运动控制过程,例如基于本发明给出的机器人的运动控制方法推广应用于结构简单的小型化ai设备的运动控制过程。这使得机器人设备进入日常生活或工作中成为可能,既有利于推动企业工业自动化发展转变,也能为今后ai设备的延伸设计发展提供了创新技术前提。
23.本发明给出的各个实施例及附图,是为了说明的目的,在不背离本发明更广泛的主旨和范围下,不同形式的等效修改是可行的。根据上述详细的说明可对本发明实施例进行修改,其修改视为落入本发明所保护的范围内。用于权利要求中的术语不应解释为限定于本发明具体实施内容和权利要求部分中所揭露的具体实施例。相反地,权利要求中完整确定的内容应理解为根据权利要求解释确立的范围。本发明的说明书和附图应被看作是解释性的,而不是约束性的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1