一种智能移动讲解机器人与多媒体设备智能互动控制的方法与流程
1.本发明属于智能机器人技术领域,具体涉及一种智能移动讲解机器人与多媒体设备智能互动控制的方法。
背景技术:
2.随着随着智能迎宾智能移动讲解机器人和多媒体设备的智能化,人工智能的受到更为广泛的关注,多媒体设备智慧化的市场越来越大;然而大多数智能迎宾智能移动讲解机器人智能做到与人们的对话交流,讲解和介绍引导,不能对范围内的多媒体设备和灯光进行控制,针对智能迎宾智能移动讲解机器人无法与多媒体设备联动,无法做到资源整合,使展厅内设备更加智能化。智能迎宾智能移动讲解机器人与多媒体设备不能联动,对智能设备是种资源浪费,不能更好的体现出智能化。因此本发明设计了一种智能移动讲解机器人与多媒体设备智能互动控制的方法,其可以做到智能移动讲解机器人代替人们控制多媒体设备,能更好的体现出智能化,智慧化。
技术实现要素:
3.针对上述背景技术所提出的问题,本发明的目的是:旨在提供一种智能移动讲解机器人与多媒体设备智能互动控制的方法。
4.为实现上述技术目的,本发明采用的技术方案如下:
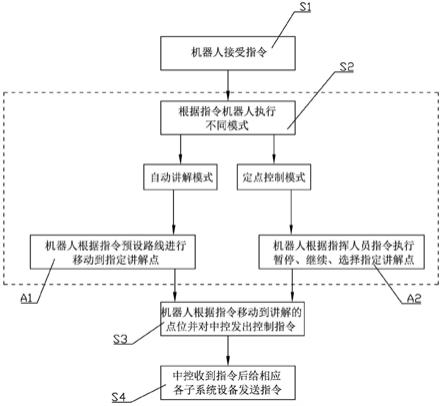
5.一种智能移动讲解机器人与多媒体设备智能互动控制的方法,包括以下步骤,
6.s1:智能移动讲解机器人接受指令;
7.s2:根据s1中接受的指令,智能移动讲解机器人执行不同模式,包括自动讲解模式和定点控制模式;
8.a1:针对自动讲解模式,智能移动讲解机器人根据该指令预设路线进行移动,并移动到该命令路线中预设讲解点进行讲解;
9.a2:针对定点控制模式,智能移动讲解机器人根据管理员指令执行暂停、继续和选择指定讲解点,智能移动讲解机器人根据管理员指令执行是否讲解;
10.s3:智能移动讲解机器人移动到指定讲解的点位后,对中央控制器发出控制指令;
11.s4:中央控制器收到指令后给相应各子系统设备发送控制指令。
12.作为本发明的一种优选方案,所述s1中智能移动讲解机器人接受指令包括,检测是否存在用户请求智能移动讲解机器人控制设备的指令,如果检测到存在符合的指令要求,智能移动讲解机器人则接受指令,向下一级设备发出控制指令。
13.作为本发明的一种优选方案,所述a1中,针对自动讲解模式,智能移动讲解机器人检测到的指令是自动讲解模式的指令,则智能移动讲解机器人根据该指令预设路线进行移动,并移动到该命令路线中预设讲解点位进行讲解;在此过程中,智能移动讲解机器人向中央控制器发出对设备预设的控制指令;中央控制器接收到该控制指令后,向该预设指令中的设备发出动作指令,对该点位预设指令中的设备进行控制,检测该点位预设指令中设备
动作是否完成、智能移动讲解机器人讲解是否结束,如果设备动作完成并智能移动讲解机器人讲解结束,该预设指令还有下一讲解点位的控制,则智能移动讲解机器人根据该自动讲解模式的预设指令自动移动到下一个点位,并对进行讲解和该点预设指令中的设备进行控制,在执行该命令过程中,检测是否存在第二指令,如果存在第二指令,则根据第二指令控制智能移动讲解机器人停止讲解或直接进行下一预设点位,如果是要求智能移动讲解机器人进行下一点位,则智能移动讲解机器人自动移动下一点位讲解并对该点位第一指令中的预设设备进行控制。
14.作为本发明的一种优选方案,所述a2中,针对针对定点控制模式,检测到智能移动讲解机器人接受指令是定点控制模式,该指令如果是对智能移动讲解机器人讲解单个点位的指令,则智能移动讲解机器人自动移动到该指令所述点位讲解;在此过程中,智能移动讲解机器人向中央控制器发出对设备预设的控制指令,中央控制器接收到该控制指令后,向该预设指令中的设备发出动作指令,控制设备接收到该指令后,向该预设指令中设备发出动作指令,该点位预设指令中设备进行操作,在此过程中,检测是否存在第二指令,如果存在第二指令,则根据第二指令控制智能移动讲解机器人停止讲解、继续或返回。
15.作为本发明的一种优选方案,所述a2中,针对针对定点控制模式,检测到智能移动讲解机器人接受定点控制模式的指令是请求对设备的控制,则智能移动讲解机器人对中央控制器发出该控制指令,中央控制器接收到该控制指令后,向该指令中设备发出动作指令,对该指令中设备进行控制。
16.作为本发明的一种优选方案,所述智能移动讲解机器人内置无线连接模块、识别模块、语音模块和智能运动模块;
17.所述无线连接模块包含4g/5g模块11、wifi模块和蓝牙连接模块;
18.所述识别模块包含客宾识别模块和管理员识别模块;
19.所述语音模块包含语音识别模块和智能讲解模块;
20.所述智能运动模块包含定位模块、红外传感器模和避障模块。
21.作为本发明的一种优选方案,所述子系统设备包括灯光控制模块、高清播放器、音频处理器、电脑、网络摄像机、显示屏、滑轨屏和触摸一体机,所述子系统设备连接有中央控制器,所述中央控制器连接有云服务器,云服务器与智能移动讲解机器人连接。
22.本发明的有益效果:
23.本发明的设计的一种智能移动讲解机器人与多媒体设备智能互动控制的方法,其可以做到智能移动讲解机器人代替人们控制多媒体设备,能更好的体现出智能化,智慧化;适合市场推广。
附图说明
24.本发明可以通过附图给出的非限定性实施例进一步说明;
25.图1为本发明智能移动讲解机器人实施例的结构示意图;
26.图2为本发明一种智能移动讲解机器人与多媒体设备智能互动控制的方法实施例的流程示意图;
27.图3为本发明智能移动讲解机器人与子系统设备的连接示意图;
28.图4为本发明智能移动讲解机器人使用场景示意图;
29.主要元件符号说明如下:
30.无线连接模块1、4g/5g模块11、wifi模块12、蓝牙连接模块13、识别模块2、客宾识别模块21和管理员识别模块22、语音模块3包含语音识别模块31、智能讲解模块32、智能运动模块4、定位模块41、红外传感器模42、避障模块43、灯光控制模块51、高清播放器52、音频处理器53、电脑54、网络摄像机55、显示屏56、滑轨屏57、触摸一体机58、中央控制器6、云服务器7。
具体实施方式
31.为了使本领域的技术人员可以更好地理解本发明,下面结合附图和实施例对本发明技术方案进一步说明。
32.如图2所示,智能移动讲解机器人内置无线连接模块1、识别模块2、语音模块3和智能运动模块4;
33.无线连接模块1包含4g/5g模块11、wifi模块12和蓝牙连接模块13;
34.识别模块2包含客宾识别模块21和管理员识别模块22;
35.语音模块3包含语音识别模块31和智能讲解模块32;
36.智能运动模块4包含定位模块41、红外传感器模42和避障模块43。
37.实施例1
38.如图1所示,一种智能移动讲解机器人与多媒体设备智能互动控制的方法,包括以下步骤,
39.s1:智能移动讲解机器人通过语音识别模块31接受指令;其中接受的指令包括,检测是否存在用户请求智能移动讲解机器人控制设备的指令,如果检测到存在符合的指令要求,智能移动讲解机器人则接受指令,向下一级设备发出控制指令;
40.s2:根据s1中接受的指令,指令智能移动讲解机器人分析出是自动讲解模式指令还是定点控制模式指令,智能移动讲解机器人根据不同指令进行相应的操作;
41.a1:针对自动讲解模式,智能移动讲解机器人检测到的指令是自动讲解模式的指令,则智能移动讲解机器人根据该指令预设路线进行移动,并移动到该命令路线中预设讲解点位进行讲解;
42.s3:智能移动讲解机器人在讲解的过程中,智能移动讲解机器人向中央控制器6发出对设备预设的控制指令;
43.s4:中央控制器6接收到该控制指令后,向该预设指令中的设备发出动作指令,对该点位预设指令中的设备进行控制,检测该点位预设指令中设备动作是否完成、智能移动讲解机器人讲解是否结束,如果设备动作完成并智能移动讲解机器人讲解结束,该预设指令还有下一讲解点位的控制,则智能移动讲解机器人根据该自动讲解模式的预设指令自动移动到下一个点位,并对进行讲解和该点预设指令中的设备进行控制,在执行该命令过程中,检测是否存在第二指令,如果存在第二指令,则根据第二指令控制智能移动讲解机器人停止讲解或直接进行下一预设点位,如果是要求智能移动讲解机器人进行下一点位,则智能移动讲解机器人自动移动下一点位讲解并对该点位第一指令中的预设设备进行控制。
44.实施例2
45.如图1所示,一种智能移动讲解机器人与多媒体设备智能互动控制的方法,包括以
下步骤,
46.s1:智能移动讲解机器人通过语音识别模块31接受指令;其中接受的指令包括,检测是否存在用户请求智能移动讲解机器人控制设备的指令,如果检测到存在符合的指令要求,智能移动讲解机器人则接受指令,向下一级设备发出控制指令;
47.s2:根据s1中接受的指令,指令智能移动讲解机器人分析出是自动讲解模式指令还是定点控制模式指令,智能移动讲解机器人根据不同指令进行相应的操作;
48.a2:针对定点控制模式指令,针对针对定点控制模式,检测到智能移动讲解机器人接受指令是定点控制模式,该指令如果是对智能移动讲解机器人讲解单个点位的指令,则智能移动讲解机器人自动移动到该指令所述点位讲解;
49.s3:智能移动讲解机器人在讲解的过程中,智能移动讲解机器人向中央控制器6发出对设备预设的控制指令;
50.s4:中央控制器6接收到该控制指令后,向该预设指令中的设备发出动作指令,控制设备接收到该指令后,向该预设指令中设备发出动作指令,该点位预设指令中设备进行操作,在此过程中,检测是否存在第二指令,如果存在第二指令,则根据第二指令控制智能移动讲解机器人停止讲解、继续或返回。
51.实施例3
52.如图1所示,一种智能移动讲解机器人与多媒体设备智能互动控制的方法,包括以下步骤,
53.s1:智能移动讲解机器人通过语音识别模块31接受指令;其中接受的指令包括,检测是否存在用户请求智能移动讲解机器人控制设备的指令,如果检测到存在符合的指令要求,智能移动讲解机器人则接受指令,向下一级设备发出控制指令;
54.s2:根据s1中接受的指令,指令智能移动讲解机器人分析出是自动讲解模式指令还是定点控制模式指令,智能移动讲解机器人根据不同指令进行相应的操作;
55.a2:针对定点控制模式指令,检测到智能移动讲解机器人接受定点控制模式的指令是请求对设备的控制;
56.s3:智能移动讲解机器人对中央控制器6发出该控制指令;
57.s4:中央控制器6接收到该控制指令后,向该指令中设备发出动作指令,对该指令中设备进行控制。
58.如图4所示,智能移动讲解机器人实际工作中控制子系统设备如下;
59.智能移动讲解机器人通过无线连接模块1的4g/5g模块11,发送编辑的灯光控制模块51的指令到云服务器7,云服务器7通过网络下发执行命令到本地的网络至中央控制器6,中央控制器6解码4g/5g模块11发出的灯光控制指令,打开对应的灯光或设定的灯光亮度等操作;
60.智能移动讲解机器人通过无线连接模块1的4g/5g模块11,发送编辑的高清播放器52的指令到云服务器7,云服务器7通过网络下发执行命令到本地的网络至中央控制器6,中央控制器6解码4g/5g模块11发出的高清播放器52的指令,打开对应的高清播放器52开始播放对应的高清视频或者暂停、开始、下一首等动作操作;
61.智能移动讲解机器人通过无线连接模块1的4g/5g模块11,发送编辑的音频处理器53的指令到云服务器7,云服务器7通过网络下发执行命令到本地的网络至中央控制器6,中
央控制器6解码音频处理器53的指令,打开对应的音频处理器53,音频处理器53接受中控的指令进行的音频切换,声音大小,音色均衡等动作的调整等操作;
62.智能移动讲解机器人通过无线连接模块1的4g/5g模块11,发送编辑的电脑54开关机的指令(具有mac唤醒功能)到云服务器7,云服务器7通过网络下发执行命令到本地的网络至中央控制器6,中央控制器6发送对应的电脑54开关机的指令,打开或关闭对应的电脑54主机,关机时联动电源时序器模块设定延时关机操作,电脑54关闭程序后自动切断电源;
63.智能移动讲解机器人通过无线连接模块1的4g/5g模块11,发送编辑的网络摄像机55的指令到云服务器7,云服务器7通过网络下发执行命令到本地的网络至中央控制器6,中央控制器6发送对应的网络摄像机55的指令,打开或关闭对应的网络摄像机55,或进行云台移动,预置位等操作;
64.智能移动讲解机器人通过无线连接模块1的4g/5g模块11,发送编辑的显示屏56(可以是led小间距或液晶拼接屏或投影机融合投影等相关显示屏产品)开关机的指令到云服务器7,云服务器7通过网络下发执行命令到本地的网络至中央控制器6,中央控制器6通过rs232发送对应的代码到继电器模块,继电器模块控制配电箱强电模块上电,显示屏56上电打开;中央控制器6通过网络发送对应的指令到视频处理器,切换对应的视频信号到显示屏56开始显示或调整对应的不同窗口的显示模式;
65.智能移动讲解机器人通过无线连接模块1的4g/5g模块11,发送编辑的滑轨屏57的指令到云服务器7,云服务器7通过网络下发执行命令到本地的网络至中央控制器6,中央控制器6通过网络发送对应的代码到滑轨屏57,滑轨屏57开关机,滑动设定的相应位置,对应打开相关的视频或展示图片;
66.智能移动讲解机器人通过无线连接模块1的4g/5g模块11,发送编辑的触摸一体机58开关机的指令(具有mac唤醒功能)到云服务器7,云服务器7通过网络下发执行命令到本地的网络至中央控制器6,中央控制器6发送对应的触摸一体机58开关机的指令,打开或关闭对应的触摸一体机58,关机时联动电源时序器模块设定延时关机操作,触摸一体机58关闭程序后自动切断电源;
67.智能移动讲解机器人通过无线连接模块1的wifi模块12,通过现场ap或路由器发送编辑的灯光控制模块51通过本地的网络至中央控制器6,中央控制器6解码到灯光控制指令,通过rs232控制接口发送打开对应的灯光控制器,打开灯光或设定的灯光亮度等操作;
68.智能移动讲解机器人通过无线连接模块1的wifi模块12,发送编辑的高清播放器52的指令到现场ap或路由器,现场ap或路由器到本地的网络至中央控制器6,中央控制器6解码通过rj45网络控制口发出高清播放器52的指令,打开对应的高清播放器52开始播放对应的高清视频或者暂停、开始、下一首等动作操作;
69.智能移动讲解机器人通过无线连接模块1的wifi模块12,发送编辑的音频处理器53的指令到现场ap或路由器,现场ap或路由器到本地的网络至中央控制器6,中央控制器6解码音频处理器53的指令,打开对应的音频处理器53,音频处理器53接受中控的指令进行的音频切换,声音大小,音色均衡等动作的调整等操作;
70.智能移动讲解机器人通过无线连接模块1的wifi模块12,发送编辑的电脑54开关机的指令(具有mac唤醒功能)到现场ap或路由器,现场ap或路由器到本地的网络至中央控制器6,中央控制器6发送对应的电脑54开关机的指令,打开或关闭对应的电脑54主机,关机
时联动电源时序器模块设定延时关机操作,电脑54关闭程序后自动切断电源;
71.智能移动讲解机器人通过无线连接模块1的wifi模块12,发送编辑的网络摄像机55的指令到现场ap或路由器,现场ap或路由器到本地的网络至中央控制器6,中央控制器6发送对应的网络摄像机55的指令,打开或关闭对应的网络摄像机55,或进行云台移动,预置位等操作;
72.智能移动讲解机器人通过无线连接模块1的wifi模块12,发送编辑的显示屏56(可以是led小间距或液晶拼接屏或投影机融合投影等相关显示屏56产品)开关机的指令到现场ap或路由器,现场ap或路由器通过网络下发执行命令到本地的网络至中央控制器6,中央控制器6通过rs232发送对应的代码到继电器模块,继电器模块控制配电箱强电模块上电,显示屏56上电打开;中央控制器6通过网络发送对应的指令到视频处理器,切换对应的视频信号到显示屏56开始显示或调整对应的不同窗口的显示模式;
73.智能移动讲解机器人通过无线连接模块1的wifi模块12,发送编辑的滑轨屏56的指令到现场ap或路由器,现场ap或路由器通过网络下发执行命令到本地的网络至中央控制器6,中央控制器6通过网络发送对应的代码到滑轨屏56,滑轨屏56开关机,滑动设定的相应位置,对应打开相关的视频或展示图片的动作操作;
74.智能移动讲解机器人通过无线连接模块1的wifi模块12,发送编辑的触摸一体机58开关机的指令(具有mac唤醒功能)到现场ap或路由器,现场ap或路由器通过网络下发执行命令到本地的网络至中央控制器6,中央控制器6发送对应的触摸一体机58开关机的指令,打开或关闭对应的触摸一体机58,关机时联动电源时序器模块设定延时关机操作,触摸一体机58关闭程序后自动切断电源;
75.智能移动讲解机器人通过无线连接模块1的蓝牙模块13,在行进到对应的蓝牙覆盖区域,自动连接蓝牙音箱设备,可以对特殊展项进行音频再扩声,方便大型多人讲解的需要。也可以连接周边蓝牙导游讲解器连接耳机,方便参观人员接听移动讲解机器人的讲解。
76.如图4所示,智能移动讲解机器人根据用户使用情景进行不同情况的提前预设活动轨迹定位;图中1-a或3-e等任意位置坐标点均可以作为定点预设讲解机器人的移动位置;
77.本套智能移动讲解机器人系统支持以下网络协议:telnet、tcp、udp、http(s)、pjlink、onvif。
78.述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1