一种装有SCARA机械臂的羽毛球机器人的制作方法
一种装有scara机械臂的羽毛球机器人
技术领域
[0001]
本发明涉及智能机器人技术领域,具体涉及的是一种装有scara机械臂的羽毛球机器人。
背景技术:
[0002]
近年来,随着人们健康意识的提高,越来越多的人选择通过运动来释放压力,促进健康。羽毛球运动由于其运动强度适当、无身体接触、趣味性强、室内外都可进行等特点,逐渐受到人们的青睐。但是,训练者每次锻炼时都需要有一名同伴陪练,锻炼过程中必不可免地要进行频繁地捡球,不仅影响训练的效率,而且严重影响锻炼者的运动体验。
[0003]
目前市场上已经存在的一些羽毛球机器人,往往具有很大的局限性。多数羽毛球机器人只能进行发球,且发球方式较为单一,无法进行持续陪练;一部分羽毛球机器人同时具备发球和击球功能,但其结构复杂,击球精度也不是很高,无法有效调整击球的位置角度和力度,而且不具备捡球功能,需要人工清理散落在场地内的羽毛球,不能完全自动化;少量机器人仅具备捡球功能,无法实现发球和击球功能。因此,需要研发一款能有效满足羽毛球训练者的使用需求的自动化程度较高的羽毛球机器人。
技术实现要素:
[0004]
本发明的目的就是为了克服上述现有技术中的不足之处,提出一种自动化程度较高的羽毛球机器人,该机器人集成发球、击球、捡球、储球四种功能为一体,解决了羽毛球运动员训练时需配备陪练,导致训练成本高的问题,全程自动化,无需人工捡球,有效改善了运动体验,极大提高了训练的效率和连贯性。
[0005]
为实现上述目的,本发明提供如下技术方案:一种装有scara机械臂的羽毛球机器人,包括移动底盘(1)、固定在移动底盘(1)上方正面的击球机构(2)、固定在移动底盘(1)内部的发球机构(3)、与发球机构(3)相连通的储球机构(4)、设置在移动底盘(1)上方背面的捡球机构(5),所述的移动底盘(1)上设置有行走结构、控制柜、激光雷达(123)、超声波传感器(116)、双目视觉摄像头(141)和工业相机(133),其中:
[0006]
所述的激光雷达(123)、超声波传感器(116)用于识别周围环境,所述的双目视觉摄像头(141)获得羽毛球飞行轨迹,并且确定羽毛球落点,所述的工业相机(133)辅助控制柜控制行走结构带动移动底盘(1)移动至羽毛球落点;
[0007]
所述发球机构(3)包括分叉式管道和发球单元,分叉式管道包括竖直管道和倾斜管道,两者呈60度倾斜角布置,所述的发球单元设置在竖直管道底部,所述的储球机构(4)包括储球管道和限位单位,储球管道与倾斜管道连通,限位单位设置在储球管道底部。
[0008]
进一步的,所述移动底盘(1)包括第一层板(11)、第二层板(12)、第三层板(13)、第四层板(14),所述的行走结构为设置在移动底盘(1)底部的四个全向轮(112),所述移动底盘(1)还包括连接第一层板(11)和第二层板(12)的第一层支撑杆(111)、连接第二层板(12)和第三层板(13)的第二层支撑杆(121)、连接第三层板(13)和第四层板(14)的第三层支撑
杆(131)、底盘上外壳(142)和底盘下外壳(124),所述底盘上外壳(142)和底盘下外壳(124)顶部设有向内的翻边,分别卡合在第四层板(14)和第二层板(12)的上端边缘处;所述全向轮(112)设置为四组,呈中心对称分布,分别安装在第一层板(11)的前后左右四方的开槽处,依次通过全向轮电机(115)、全向轮安装板(113)和全向轮安装架(114)与第一层板(11)相连;所述第一层板(11)的上部安装有超声波传感器(116),所述超声波传感器(116)设置为四组,均匀分布在第一层板(11)边缘处;所述移动底盘(1)上的第二层板(12)上安装有激光雷达(123),所述激光雷达(123)固定在雷达安装板(122)上,通过雷达安装板(122)与第二层板(12)相连;所述第三层板(13)上设置有控制柜(132)和工业相机(133),所述工业相机(133)设置为两组,对称分布在第三层板(13)后部两边;所述第四层板(14)上设有双目视觉摄像头(141),位于第四层板(14)上与发球机构(3)相连的圆孔处后方。
[0009]
进一步的,所述击球机构(2)包括scara机械臂和scara臂座体(21),所述击球机构(2)拥有三个转动自由度和一个移动自由度,所述scara机械臂包括移动臂(22)、大臂(23)、小臂(24),所述小臂(24)末端连接有羽毛球拍(243),所述击球机构(2)包括scara机械臂和scara臂座体(21),所述scara机械臂依次包括移动臂(22)、大臂(23)和小臂(24),所述scara臂座体(21)包括座体电机(211)、联轴器(212)、丝杠(213)、导杆(214)、法兰轴承(215)、丝杠螺母(216)和直线轴承(217),所述座体电机(211)通过联轴器(212)与丝杠(213)顶部相连,所述丝杠(213)底部通过法兰轴承(215)与scara臂座体(21)相配合,所述法兰轴承(215)设置为两组,两组所述法兰轴承(215)对称安装在scara臂座体(21)的安装孔上,所述导杆(214)设置为两组,直接与scara臂座体(21)相连;所述移动臂(22)上设置有两个直线轴承(217)安装孔和一个丝杠螺母(216)安装孔,所述移动臂(22)的直线轴承(217)安装孔中配合有两个直线轴承(217),从而与导杆(214)相配合,所述直线轴承(217)关于安装孔对称布置,所述移动臂(22)的丝杠螺母(216)安装孔中安装有丝杠螺母(216),从而与丝杠(213)相配合。
[0010]
进一步的,所述移动臂(22)上还设置有两个轴孔和一个电机安装孔,所述移动臂电机(221)安装孔上安装有移动臂电机(221),所述移动臂电机(221)的电机轴连接有第一小齿轮(222);所述移动臂轴孔内部都包括第一轴套(225)、第一薄壁轴承(223)和第一轴承端盖(224),所述第一薄壁轴承(223)和第一轴承端盖(224)在每个轴孔中均设置为两个且关于第一轴套(225)对称布置;所述移动臂轴孔中靠近电机安装孔的轴孔内部与第一齿轮轴(227)的顶部相配合,所述第一齿轮轴(227)底部嵌套有第一齿圈(228),所述第一齿圈(228)与第一小齿轮(222)相啮合,所述第一齿轮轴(227)顶部镶嵌有第一中间齿轮轴(226);所述轴孔中远离电机安装孔的轴孔与大臂(23)底部的轴相配合,所述大臂(23)底部的轴同时与第一轴向固定盖(229)相连,所述大臂(23)顶部嵌套有第二齿圈(233),所述第二齿圈(233)与第一中间齿轮轴(226)相啮合;所述大臂(23)上设置有一个电机安装孔和一个轴孔,所述电机安装孔上安装有大臂电机(231),所述大臂电机(231)的电机轴连接有第二小齿轮(232);所述大臂轴孔内部包括第二轴套(236)、第二薄壁轴承(234)和第二轴承端盖(235),所述第二薄壁轴承(234)和第二轴承端盖(235)设置为两个且关于第二轴套(236)对称布置;所述大臂轴孔与小臂(24)底部的轴相配合,所述小臂(24)底部的轴同时与第二轴向固定盖(237)相连,所述小臂(24)顶部嵌套有第三齿圈(241),所述第三齿圈(241)与第二小齿轮(232)相啮合。所述小臂(24)的末端安装有小臂电机(242),所述小臂电机(242)与
羽毛球拍(243)相连接。
[0011]
进一步的,所述发球机构(3)包括发球单元和分叉式管道,分叉式管道包括左发球桶(31)和右发球桶(32),所述左发球桶(31)和右发球桶(32)设置为分叉式管道结构,所述左发球桶(31)和右发球桶(32)通过竖直管道上下两端的法兰分别与底盘的第三层板(13)和第四层板(14)相连,所述左发球桶(31)和右发球桶(32)的倾斜管道末端同样设有法兰,用于与储球机构(4)的连接,发球单元包括弹射板(34)、大推拉式电磁铁(35)、大电磁铁安装板(36),所述左发球桶(31)和右发球桶(32)中固定有卡块(33),所述卡块(33)下方设有可以沿管壁滑动的弹射板(34),所述卡块(33)上设有特殊的槽口,与弹射板(34)相嵌合,所述弹射板(34)底部与大推拉式电磁铁(35)的推轴顶部相连,所述大推拉式电磁铁(35)通过大电磁铁安装板(36)与底盘的第三层板(13)相固定。
[0012]
进一步的,所述储球机构(4)包括储球管道和限位单位,储球管道包括上储球桶(41)和下储球桶(42),所述上储球桶(41)和下储球桶(42)的底部设有法兰,用于与发球机构(3)的连通,限位单位包括卡钳(43)、卡钳弹簧(431)、卡钳连接块(432)、连杆(44)、运动块(45)、小推拉式电磁铁(47)、小电磁铁安装板(48)和固定板(49),所述上储球桶(41)和下储球桶(42)的法兰上部设有两个凸台,凸台内部开有形状特殊的内腔,用于承载卡钳(43)的滑动及限位,所述卡钳(43)前段呈半圆弧状长薄片,用于卡合管道内的羽毛球,所述卡钳(43)中段为端面呈正方形的阶梯轴,轴的外部套有卡钳弹簧(431),所述卡钳弹簧(431)固定在上储球桶(41)和下储球桶(42)的两个凸台的内腔中,所述卡钳(43)后段为螺纹轴,用于与卡钳连接块(432)的固定连接,所述卡钳连接块(432)通过连杆(44)与运动块(45)相连,所述运动块(45)中心设有螺纹孔,配合螺帽(46),用于与小推拉式电磁铁(47)的推轴的连接,所述小推拉式电磁铁(47)通过小电磁铁安装板(48)与固定板(49)相连,所述固定板(49)的上板片末端有一半圆槽,用于与下储球桶(42)的固定,所述固定板(49)的下板片上设有两个安装孔,用于与控制柜(132)的连接。
[0013]
进一步的,所述捡球机构(5)包括第一舵机(51)、第二舵机(52)、第三舵机(54)、第四舵机(56)、长臂(53)、短臂(55)及末端的夹爪(57),所述捡球机构(5)的最底部为第一舵机支架(511),所述第一舵机支架(511)的两侧耳片上开有四个安装孔,用于与底盘第三层板(13)的固定连接,所述第一舵机支架(511)中部设有槽口和安装孔,用于固定第一舵机(51),所述第一舵机(51)通过第一舵盘(512)与旋转台(513)相连,所述旋转台(513)的底部与第一舵机支架(511)顶部的环状凸台相配合,便于承载,所述旋转台(513)通过第二舵机支架(521)与第二舵机(52)相连,所述第二舵机(52)的舵机轴通过第二舵盘(522)与第二舵机连接板(524)的一端耳片固定连接,所述第二舵机连接板(524)的另一端耳片上的圆孔与第二杯士轴承(523)相配合,所述第二杯士轴承(523)与第二舵机支架(521)相固连,所述第二舵机连接板(524)通过长臂(53)与第三舵机连接板(544)相连,所述第三舵机支架(541)与第三舵机(54)相连,所述第三舵机(54)的舵机轴通过第三舵盘(542)与第三舵机连接板(544)的一端耳片固定连接,所述第三舵机连接板(544)的另一端耳片上的圆孔与第三杯士轴承(543)相配合,所述第三杯士轴承(543)与第三舵机支架(541)相固连,所述第三舵机支架(541)通过短臂(55)与第四舵机支架(561)相连,所述第四舵机支架(561)与第四舵机(56)连接,所述第四舵机(56)通过第四舵盘(562)与第四舵机连接板(563)连接,所述第四舵机连接板(563)上固定有夹爪(57),所述夹爪(57)包括夹爪基座(571)、夹爪螺母座
(572)、夹爪长连杆(573)、夹爪短连杆(574)、夹爪螺帽(575)、夹指(576)、电机及丝杠(577),所述电机及丝杠(577)与夹爪基座(571)相连,所述夹爪基座(571)与第四舵机连接板(563)相连,所述夹指(576)通过夹爪长连杆(573)与夹爪基座(571)连接,所述夹爪长连杆(573)同时通过夹爪短连杆(574)与夹爪螺母座(572)相连,所述夹爪螺母座(572)与电机及丝杠(577)相配合,所述电机及丝杠(577)顶部设置有夹爪螺帽(575)。
[0014]
与现有技术相比,本发明的有益效果如下:
[0015]
(1)本发明结构设计巧妙,自动化程度高,采用模块化设计,整体由移动底盘、击球机构、发球机构、储球机构、捡球机构组成,集移动、击球、发球、储球、捡球功能为一体,结构紧凑,可靠性强,集成度高,同时也便于拆装与维护。
[0016]
(2)本发明机构布置方式独特,采用一体两面的设计思路,在同一个全向移动底盘上,正面用于陪练模式,布置有击球和发球机构,背面用于捡球模式,布置有捡球和储球机构,使得空间利用合理,机器人在陪练和捡球两种应用模式中自由切换。
[0017]
(3)本发明的击球机构采用scara机械臂,拥有一个移动自由度和三个旋转自由度,相比于目前的同类产品,其击球精度更高,在控制系统的作用下能够实现对击球位置、角度、力度的有效调节,实现多角度发球和击球,增强训练效果。
[0018]
(4)本发明的发球装置设计独特,结构为分叉式管道,竖直管道内的大电磁铁用于弹射发球,倾斜管道与储球机构连同,利用小电磁铁的启停和羽毛球的重力作用控制落球,弹射板在弹球的同时能控制斜道的通阻,使得落球发球井然有序,也使得结构更为紧凑,提高空间利用率。
附图说明
[0019]
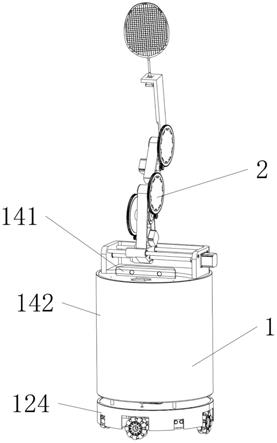
图1是本发明的整体结构示意图;
[0020]
图2是图1的内部结构示意图;
[0021]
图3是图2去除上储球桶和左发球桶后的结构示意图;
[0022]
图4是本发明移动底盘第一层板的结构示意图;
[0023]
图5是本发明移动底盘第二层板的结构示意图;
[0024]
图6是本发明scara机械臂的分解结构示意图;
[0025]
图7是本发明scara臂座体的结构示意图;
[0026]
图8是本发明发球储球机构去除上储球桶和左发球桶后的结构示意图;
[0027]
图9是本发明发球机构的分解结构示意图;
[0028]
图10是本发明储球机构的分解结构示意图;
[0029]
图11是本发明捡球机构的结构示意图;
[0030]
图12是图11的分解结构示意图;
[0031]
图13是本发明的发球原理示意图;
[0032]
图中:
[0033]
1移动底盘、11第一层板、111第一层支撑杆、112全向轮、113全向轮安装板、114全向轮安装架、115全向轮电机、116超声波传感器、12第二层板、121第二层支撑杆、122雷达安装板、123激光雷达、124底盘下外壳、13第三层板、131第三层支撑杆、132控制柜、133工业相机、14第四层板、141双目视觉摄像头、142底盘上外壳。
[0034]
2击球机构、21scara臂座体、211座体电机、212联轴器、213丝杠、214导杆、215法兰轴承、216丝杠螺母、217直线轴承、22移动臂、221移动臂电机、222第一小齿轮、223第一薄壁轴承、224第一轴承端盖、225第一轴套、226第一中间齿轮轴、227第一齿轮轴、228第一齿圈、229第一轴向固定盖、23大臂、231大臂电机、232第二小齿轮、233第二齿圈、234第二薄壁轴承、235第二轴承端盖、236第二轴套、237第二轴向固定盖、24小臂、241第三齿圈、242小臂电机、243羽毛球拍。
[0035]
3发球机构、31左发球桶、32右发球桶、33卡块、34弹射板、35大推拉式电磁铁、36大电磁铁安装板。
[0036]
4储球机构、41上储球桶、42下储球桶、43卡钳、431卡钳弹簧、432卡钳连接块、44连杆、45运动块、46螺帽、47小推拉式电磁铁、48小电磁铁安装板、49固定板。
[0037]
5捡球机构、51第一舵机、511第一舵机支架、512第一舵盘、513旋转台、52第二舵机、521第二舵机支架、522第二舵盘、523第二杯士轴承、524第二舵机连接板、53长臂、54第三舵机、541第三舵机支架、542第三舵盘、543第三杯士轴承、544第三舵机连接板、55短臂、56第四舵机、561第四舵机支架、562第四舵盘、563第四舵机连接板、57夹爪、571夹爪基座、572夹爪螺母座、573夹爪长连杆、574夹爪短连杆、575夹爪螺帽、576夹指、577电机及丝杠。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0039]
参见图1至图13,本实施例公开了一种装有scara机械臂的羽毛球机器人,包括移动底盘1、固定在移动底盘1上方的击球机构2、固定在移动底盘1内部的发球机构3、与发球机构3相连通的储球机构4、设置在储球机构4后方的捡球机构5,移动底盘1包括第一层板11、第二层板12、第三层板13、第四层板14,移动底盘1底部设有四个全向轮112,移动底盘1上设有激光雷达123、超声波传感器116、双目视觉摄像头141和工业相机133,移动底盘1内部固定有控制柜132;击球机构2包括scara机械臂和scara臂座体21,击球机构2拥有三个转动自由度和一个移动自由度,scara机械臂包括移动臂22、大臂23、小臂24,小臂24末端连接有羽毛球拍243;发球机构3设计为分叉式管道,与同为管道状的储球机构4相连通;捡球机构5包括第一舵机21、第二舵机52、第三舵机54、第四舵机56、长臂53、短臂55及末端的夹爪57。
[0040]
进一步地,移动底盘1还包括连接第一层板11和第二层板12的第一层支撑杆111、连接第二层板12和第三层板13的第二层支撑杆121、连接第三层板13和第四层板14的第三层支撑杆131、底盘上外壳142和底盘下外壳124,考虑到第一层支撑杆111位于机器人最底层载荷较大,故选用铝型材作为支撑;底盘上外壳142和底盘下外壳124顶部设有向内的翻边,分别卡合在第四层板14和第二层板12的上端边缘处;全向轮112设置为四组,呈中心对称分布,分别安装在第一层板11的前后左右四方的开槽处,依次通过全向轮电机115、全向轮安装板113和全向轮安装架114与第一层板11相连,使得机器人在接收指令后能快速移动到指定位置;第一层板11的上部安装有超声波传感器116,超声波传感器116设置为四组,均
匀分布在第一层板11边缘处,使得机器人在运动过程中能够检测处周围物体,及时避障;移动底盘1上的第二层板12上安装有激光雷达123,负责建图定位和轨迹规划,激光雷达123固定在雷达安装板122上,通过雷达安装板122与第二层板12相连,雷达安装板122设计为u形呈现为向下凹陷状,目的是为了只露出激光雷达123的有效检测部分,减小第二层板12支架的高度,使结构更加稳定;第三层板13上设置有控制柜132和工业相机133,控制柜132是整个机器人的控制中心,负责接收传感器传来的信息并发出命令驱动执行器件工作,工业相机133设置为两组,对称分布在第三层板13后部两边,用于捡球模式时对待捡羽毛球相对位置信息的提取;第四层板14上设有双目视觉摄像头141,位于第四层板14上与发球机构3相连的圆孔处后方,用于陪练模式时对飞行羽毛球轨迹的图像获取。
[0041]
进一步地,击球机构2包括scara机械臂和scara臂座体21,scara机械臂依次包括移动臂22、大臂23和小臂24,scara臂座体21包括座体电机211、联轴器212、丝杠213、导杆214、法兰轴承215、丝杠螺母216和直线轴承217,座体电机211通过联轴器212与丝杠213顶部相连,丝杠213底部通过法兰轴承215与scara臂座体21相配合,法兰轴承215设置为两组,两组法兰轴承215对称安装在scara臂座体21的安装孔上,导杆214设置为两组,直接与scara臂座体21相连;移动臂22上设置有两个直线轴承安装孔和一个丝杠螺母安装孔,移动臂22的直线轴承安装孔中配合有两个直线轴承217,从而与导杆214相配合,直线轴承217关于安装孔对称布置,移动臂22的丝杠螺母安装孔中安装有丝杠螺母216,从而与丝杠213相配合,这样就实现了座体电机211带动丝杠213转动,进而使得装有丝杠螺母216的移动臂22左右移动,其中直线轴承217起到了减缓摩擦阻力的作用,从而实现了高精度平稳运动。
[0042]
进一步地,移动臂22上还设置有两个轴孔和一个电机安装孔,三个孔的周围采取了镂空设计,这样能在保证结构刚度的前提下有效减小移动臂22的重量同时也降低了成本;移动臂电机221安装孔上安装有移动臂电机221,移动臂电机221的电机轴连接有第一小齿轮222;移动臂轴孔内部都包括第一轴套225、第一薄壁轴承223和第一轴承端盖235,第一薄壁轴承223和第一轴承端盖235在每个轴孔中均设置为两个且关于第一轴套225对称布置;移动臂轴孔中靠近电机安装孔的轴孔内部与第一齿轮轴227的顶部相配合,第一齿轮轴227底部嵌套有第一齿圈228,齿圈采用塑料材质,成本较低,在达到使用期限后可进行替换,第一齿圈228与第一小齿轮222相啮合,第一齿轮轴227顶部镶嵌有第一中间齿轮轴226;轴孔中远离电机安装孔的轴孔与大臂23底部的轴相配合,大臂23底部的轴同时与第一轴向固定盖229相连,大臂23顶部嵌套有第二齿圈233,第二齿圈233与第一中间齿轮轴226相啮合,从而实现了从移动臂电机221到第一齿轮轴227再到大臂轴的动力传输过程,同时也实现了两级减速传动;大臂23上设置有一个电机安装孔和一个轴孔,电机安装孔上安装有大臂电机231,大臂电机231的电机轴连接有第二小齿轮232;大臂轴孔内部包括第二轴套236、第二薄壁轴承234和第二轴承端盖235,第二薄壁轴承234和第二轴承端盖235设置为两个且关于第二轴套236对称布置;大臂轴孔与小臂24底部的轴相配合,小臂24底部的轴同时与第二轴向固定盖237相连,小臂24顶部嵌套有第三齿圈241,第三齿圈241与第二小齿轮232相啮合,从而实现了第二电机到小臂轴的一级减速传动;小臂24的末端安装有小臂电机242,小臂电机242与羽毛球拍243相连接,从而使得羽毛球拍243能绕其球拍轴旋转一定角度,进而实现多角度击球,提高训练效果。
[0043]
进一步地,发球机构3包括左发球桶31和右发球桶32,左发球桶31和右发球桶32设
置为分叉式管道结构,分为竖直管道和倾斜管道,两者呈60度倾斜角布置,左发球桶31和右发球桶32通过竖直管道上下两端的法兰分别与底盘的第三层板13和第四层板14相连,左发球桶31和右发球桶32的倾斜管道末端同样设有法兰,用于与储球机构4的连接。左发球桶31和右发球桶32中固定有卡块33,用于承载从斜管中落下的羽毛球,卡块33下方设有可以沿管壁滑动的弹射板34,卡块33上设有特殊的槽口,与弹射板34相嵌合,使得弹射板34可以沿着卡块33上的槽口滑动,起到类似导轨的作用,弹射板34底部与大推拉式电磁铁35的推轴顶部相连,大推拉式电磁铁35通过大电磁铁安装板36与底盘的第三层板13相固定,大推拉式电磁铁35中有弹簧,在大推拉式电磁铁35断电时,推轴在弹力的作用下处于拉升状态,大推拉式电磁铁35通电,推轴克服弹簧弹力回缩,大推拉式电磁铁35再次断电,弹性势能转化为动能从而实现弹射;值得一提的是,弹射板34不仅起到弹射羽毛球的作用,还起到了控制倾斜管口开合的作用,这样配合储球机构4对羽毛球的放落,能够有效实现每次只有一个羽毛球进入竖直管道预备弹射,当弹射完成后弹射板34再次向下运动时又有斜管内的羽毛球落入填补空白,结构设计的巧妙极大提高了弹射的效率。
[0044]
进一步地,储球机构4包括上储球桶41和下储球桶42,上储球桶41和下储球桶42的底部设有法兰,用于与发球机构3的连通,从而实现固定,上储球桶41和下储球桶42的法兰上部设有两个凸台,凸台内部开有阶梯状的内腔,用于承载卡钳43的滑动及限位,卡钳43前段呈半圆弧状长薄片,用于卡合管道内的羽毛球,卡钳43中段为端面呈正方形的阶梯轴,轴的外部套有卡钳弹簧431,卡钳弹簧431固定在上储球桶41和下储球桶42的两个凸台的内腔中,卡钳43后段为螺纹轴,用于与卡钳连接块432的固定连接,卡钳连接块432通过连杆44与运动块45相连,运动块45中心设有螺纹孔,配合螺帽46,用于与小推拉式电磁铁47的推轴的连接,小推拉式电磁铁47通过小电磁铁安装板48与固定板49相连,固定板49的上板片末端有一半圆槽,用于与下储球桶42的固定,固定板49的下板片上设有两个安装孔,用于与控制柜132的连接,在平常状态时小推拉式电磁铁47断电,两个卡钳43在卡钳弹簧431的作用下始终保持相对运动趋势,从而实现羽毛球的卡紧,当小推拉式电磁铁47通电时,小推拉式电磁铁47的推轴向前运动进而带动两个卡钳43克服卡钳弹簧431的弹力相互背离,从而实现羽毛球的放落。
[0045]
进一步地,捡球机构5包括第一舵机51、第二舵机52、第三舵机54、第四舵机56、长臂53、短臂55及末端的夹爪57,捡球机构5的最底部为第一舵机支架511,第一舵机支架511的两侧耳片上开有四个安装孔,用于与底盘第三层板13的固定连接,第一舵机支架511中部设有槽口和安装孔,用于固定第一舵机51,第一舵机51通过第一舵盘512与旋转台513相连,旋转台513的底部与第一舵机支架511顶部的环状凸台相配合,便于承载,旋转台513通过第二舵机支架521与第二舵机52相连,第二舵机52的舵机轴通过第二舵盘522与第二舵机连接板524的一端耳片固定连接,第二舵机连接板524的另一端耳片上的圆孔与第二杯士轴承523相配合,第二杯士轴承523与第二舵机支架521相固连,第二舵机连接板524通过长臂53与第三舵机连接板544相连,第三舵机支架541与第三舵机54相连,第三舵机54的舵机轴通过第三舵盘542与第三舵机连接板544的一端耳片固定连接,第三舵机连接板544的另一端耳片上的圆孔与第三杯士轴承543相配合,第三杯士轴承543与第三舵机支架541相固连,第三舵机支架541通过短臂55与第四舵机支架561相连,第四舵机支架561与第四舵机56连接,第四舵机56通过第四舵盘562与第四舵机连接板563连接,第四舵机连接板563上固定有夹
爪57,夹爪57包括夹爪基座571、夹爪螺母座572、夹爪长连杆573、夹爪短连杆574、夹爪螺帽575、夹指576、电机及丝杠577,电机及丝杠577与夹爪基座571相连,夹爪基座571与第四舵机56连接板相连,夹指576通过夹爪长连杆573与夹爪基座571连接,夹爪长连杆573同时通过夹爪短连杆574与夹爪螺母座572相连,夹爪螺母座572与电机及丝杠577相配合,电机及丝杠577顶部设置有夹爪螺帽575,这样就实现了通过控制电机及丝杠577的转动进而控制了夹爪57的开合。
[0046]
本发明的工作过程及工作原理如下:
[0047]
参见图13,当机器人处于陪练模式时,由机器人的正面进行工作,首先进行发球工作,大推拉式电磁铁35通电,驱使弹射板34下降至其下限位置,倾斜管道口开启,使得原本在倾斜管道内的羽毛球落入竖直管道内的卡块33上,随后大推拉式电磁铁35断电,使得弹射板34在弹簧回弹力的作用下向上弹起,继而将卡块33上的羽毛球弹出竖直管道,因为卡块33的阻挡,弹射板34静止在其上限位置,同时也使得倾斜管道口闭合,随后储球机构4内的小推拉式电磁铁47通电,推动运动块45向前,继而带动两个卡钳43克服卡钳弹簧431的弹力张开,从而使得储球管内第一个羽毛球落入发球机构3的斜道中,该羽毛球因为弹射板34的阻挡而静止在直管与斜管交界处,小推拉式电磁铁47断电,使得两个卡钳43在卡钳弹簧431回弹力的作用下接合,正好钳住原来的储球机构4内的第二个羽毛球,待下次发球时则重复以上步骤。
[0048]
羽毛球弹出竖直管道后,击球机构2运作,将羽毛球拍向运动员处,当运动员击回羽毛球时,首先安装在移动底盘1上方的双目视觉摄像头141自动捕捉羽毛球的飞行轨迹并计算其落点位置,并将信息反馈到控制柜132,控制柜132发出移动底盘1移动及击球机构2击球的命令,与移动底盘1的全向轮112相连的全向轮电机115接受命令,移动底盘1移动到控制柜132指定的位置,同时,击球机构2在座体电机211、移动臂电机221、大臂电机231、小臂电机242的驱动下,带动安装在其小臂24末端上的羽毛球拍243完成击球运动,如此不断进行击球实现陪练。
[0049]
当陪练模式结束后,机器人需要清理之前陪练模式中散落在球场内的羽毛球,从而进入捡球模式,由机器人的背面进行工作,首先激光雷达123开启进行扫描建图定位,配合两个工业相机133进行轨迹规划,移动底盘1上的超声波传感器116负责检测周围障碍及时避障,当机器人移动至待捡羽毛球处时,工业相机133将羽毛的相对位置信息传送至控制柜132,控制柜132发出捡球命令,捡球机构5开始工作,在第一舵机51、第二舵机52、第三舵机54、第四舵机56、电机及丝杠577的驱动下夹取羽毛球,将其有序放入储球机构4的管道内,此过程不断重复,直到所有的羽毛球都被捡起为止,捡球模式结束。
[0050]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1