一种自感知吸附型机械手、包含它的机器人及抓取光学零件的方法与流程
1.本发明涉及一种自感知吸附型机械手、包含它的机器人及抓取光学零件的方法,属于吸附型机械手领域。
背景技术:
2.近年来,以机器换人为目标的感知化、数字化、自动化、智能化、无人化制造业模式 (工业4.0)的发展异常迅猛。依托科技的进步,最先在半导体制造领域实现了无人化制造,无人化制造目前正在向各行各业拓展,例如家用电器、汽车制造等。
3.光学零件的制造在众多制造业领域中有其特殊性,材料重、脆、软,表面光洁度高、怕污染,因而在材料的抓取、转运、加工、检测等方面需要特别谨慎。特别是产量大、尺寸小的光通讯和手机镜头等镜片,表面不能触碰、夹取,以免产生碎屑,成为光学零件加工无人化进程中的一道难题。
技术实现要素:
4.本申请针对小尺寸光学小零件等的制造,开发一款自感知、吸附型机械手,便于促进光学零件加工制造的无人化。
5.为解决上述技术问题,本发明所采用的技术方案如下:
6.一种自感知吸附型机械手,包括真空管、真空泵和吸嘴;
7.真空管一端与真空泵的吸气管连通、另一端与吸嘴连通,吸嘴由弹性材料制备;
8.真空管上设有第一气阀,吸嘴和第一气阀之间的真空管上设有压力传感器和排气管,排气管上设有第二气阀。
9.第一气阀的设置用于控制真空的通断;第二气阀的设置用于真空管内真空的释放;压力传感器用于探测真空管内部压力;吸嘴用于对光学元件等的表面形成吸附。
10.使用时,直接将上述自感知吸附型机械手安装到机器人手臂上即可。
11.真空泵上设有吸气管和排气管为现有常识,本申请不再赘述。
12.本申请通过实时探测真空度来控制机器人的运动,可以确保机器人抓取的成功率。在吸嘴还没有完全接触到玻璃零件表面时,压力传感器上的负压值比较低,而当随着机器人进一步运动直至吸嘴完全接触到玻璃表面时,吸嘴被堵死,玻璃零件被吸嘴吸住,真空管内的真空值瞬间陡升,压力传感器感知到玻璃零件已经被吸住,立刻发送指令让机器人带着玻璃零件后撤,实现对玻璃零件的吸附抓取;而当机器人带着被吸附抓取的玻璃零件到达预设位置时,第一气阀封闭以隔离真空,同时第二气阀开启以释放真空管中的真空,此时,吸附在吸嘴上的玻璃零件由于不再受到真空的吸力,在重力的作用下会自动脱离,实现对玻璃零件的排片;此时,机器人将向下一个玻璃样品移动以实现对下一个玻璃样品的抓取,与此同时,第二气阀关闭以隔离空气,第一气阀开启而让真空管再次与真空连接,在真空管中建立起真空,准备下一次吸附抓取动作。如此循环往复,机器人不断把玻璃样品抓
取,然后输运到指定的位置后放下,实现对玻璃样品的有序排片。
13.对于真空吸附操作而言,完全依靠机械操作的精度来保证吸附抓取成功率是十分困难的,细微的定位误差就可能导致吸嘴漏气而导致吸附抓取的失败。而如果为了防止漏气导致吸附的失败,减少吸嘴与玻璃零件的距离,若有发生控制误差,很容易导致吸嘴对玻璃零件的挤压过重,进而损坏玻璃零件。而本申请对玻璃样品的吸附抓取不是依赖机器人对吸嘴在空间中位置的绝对控制精度而实现的,而是在机器人带着吸嘴在运动过程中,通过压力传感器上的真空值来感知玻璃样品是否被吸住,使得吸附抓取的作业具有一定的灵活性和高度的可靠性。这样,即使玻璃样品本身具有一定的厚度差或机器人的位置控制有一定的误差,也不影响机器人的抓取作业,不会导致吸附不到的局面。
14.上述吸嘴优选由橡胶或硅胶制备,原料来源广泛,弹性好。
15.为了提高压力感应的准确性,压力传感器设在吸嘴和排气管之间。
16.为了进一步提高使用的稳定性,真空管由刚性材料制备。
17.为了提高控制的准确性,压力传感器为负压式压力传感器。
18.上述机械手为具有自感知能力的、吸附型机械手,用于吸取、输运、排列光学零件等,降低了对机器人定位的精度要求,具有类似触觉的性能。
19.一种机器人,包括上述自感知吸附型机械手,自感知吸附型机械手安装在机器人手臂上。
20.本申请对机器人其他的结构和控制方法没有改进,因此不再赘述。
21.将本申请具有自感知能力的、吸附型机械手,安装在机器人手臂上,用于抓取光学零件等,降低了对机器人定位的精度要求,避免了吸附不到或由于没有完全吸附而中途掉落的局面。
22.本申请机械手的“自感知”,指对光学零件的吸附抓取不是依赖机器人对吸嘴的绝对控制精度而实现的,而是通过检测压力传感器上的真空值来感知零件样品是否被完全吸住,具有类似触觉的性能,降低了对机器人定位的精度要求,便于促进光学零件加工制造的无人化。
23.上述机器人抓取光学零件的方法,包括如下步骤:
24.1)启动真空泵,开启第一气阀、关闭第二气阀,在机器人的控制下,自感知吸附型机械手向光学零件移动,当吸嘴完全接触到光学零件表面时,吸嘴被堵死,真空管内的真空值瞬间陡升,压力传感器感知到光学零件已经被吸住,立刻发送指令让机器人带着光学零件后撤,实现对光学零件的吸附抓取;
25.2)当机器人带着被吸附抓取的光学零件到达预设位置时,第一气阀封闭以隔离真空,同时第二气阀开启以释放真空管中的真空,此时,吸附在吸嘴上的光学零件由于不再受到真空的吸力,在重力的作用下会自动脱离,机器人将向下一个玻璃样品移动;
26.3)循环步骤1)
‑
2),实现光学零件的有序抓取。
27.上述通过实时探测真空度来控制机器人的运动,可以确保机器人抓取的成功率。
28.吸嘴吸口是小于光学零件的表面的,以实现对光学零件的完全吸附。
29.本发明未提及的技术均参照现有技术。
30.本发明自感知吸附型机械手,是具有自感知能力的吸附型机械手,用于吸取、输运、排列光学零件等,对光学零件的吸附抓取不是依赖机器人对吸嘴在空间中位置的绝对
控制精度而实现的,而是通过检测压力传感器上的真空值来感知零件样品是否被完全吸住,使得吸附抓取的作业具有一定的灵活性和高度的可靠性,具有类似触觉的性能,降低了对机器人定位的精度要求,避免了吸附不到或由于没有完全吸附而中途掉落的局面。
附图说明
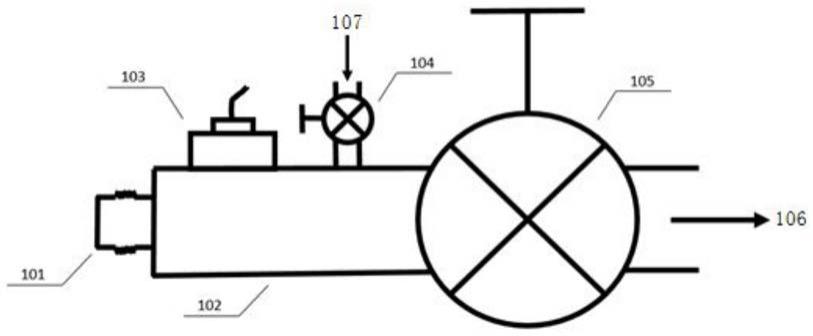
31.图1为本发明自感知吸附型机械手的结构示意图;
32.图中,101为吸嘴,102为真空管,103为压力传感器,104为第二气阀,105为第一气阀,106为真空,107为空气。
具体实施方式
33.为了更好地理解本发明,下面结合实施例进一步阐明本发明的内容,但本发明的内容不仅仅局限于下面的实施例。
34.如图1所示,一种自感知吸附型机械手,包括真空管、真空泵和吸嘴;
35.真空管由刚性材料制备,真空管一端与真空泵的吸气管连通、另一端与吸嘴连通,吸嘴由橡胶或硅胶制备;
36.真空管上设有第一气阀,吸嘴和第一气阀之间的真空管上设有压力传感器和排气管,排气管上设有第二气阀,压力传感器设在吸嘴和排气管之间,压力传感器为负压式压力传感器。
37.使用时,直接将上述自感知吸附型机械手安装到机器人手臂上即可。
38.上述机器人抓取光学零件的方法,包括如下步骤:
39.1)启动真空泵,开启第一气阀、关闭第二气阀,在机器人的控制下,自感知吸附型机械手向光学零件移动,当吸嘴完全接触到光学零件表面时,吸嘴被堵死,真空管内的真空值瞬间陡升,压力传感器感知到光学零件已经被完全吸住,立刻发送指令让机器人带着光学零件后撤,实现对光学零件的吸附抓取;
40.2)当机器人带着被吸附抓取的光学零件到达预设位置时,第一气阀封闭以隔离真空,同时第二气阀开启以释放真空管中的真空,此时,吸附在吸嘴上的光学零件由于不再受到真空的吸力,在重力的作用下会自动脱离,实现对光学零件的排片,机器人将向下一个玻璃样品移动;
41.3)循环步骤1)
‑
2),实现光学零件的有序排片。
42.上述机械手为具有自感知能力的、吸附型机械手,具有类似触觉的性能,上述对玻璃样品的吸附抓取不是依赖机器人对吸嘴在空间中位置的绝对控制精度而实现的,而是在机器人带着吸嘴在运动过程中,通过压力传感器上的真空值来感知玻璃样品是否被吸住,降低了对机器人定位的精度要求,使得光学零件的吸附抓取作业具有一定的灵活性和高度的可靠性,避免了吸附不到或由于没有完全吸附而中途掉落的局面。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1