电动锁具的制作方法
1.本发明涉及一种电动锁具,尤其涉及一种应用于车箱的电动锁具。
背景技术:
2.现有的机车通常在车体中安装一车箱,用以装载物品,座垫是可转动地连接在车体上以覆盖车箱。为了防盗,车箱内会安装锁具,用以卡合于座垫上的扣件进而锁定座垫。由于现有的锁具大多为手动开启,需要通过钥匙去解锁车体的锁具,才能解除座垫与车体的锁定状态,此解锁过程的动作繁琐且在使用上较为不便。
3.因此,目前开发出一种电动锁具,可通过远程摇控达到解锁的目的,然而现有的电动锁具在远程控制设备损坏时,在维修上较为不易。
技术实现要素:
4.本发明是提供一种电动锁具,具备远程解锁与手动解锁的功能,可依据使用需求而采用任一种解锁方式,具有使用上的便利性。
5.本发明的电动锁具,包括主体座、锁舌、弹性杆、驱动组件以及远程接收器。锁舌可枢转地配置在主体座的顶面。弹性杆可移动地穿设于主体座且连接锁舌的自由端。驱动组件配置在主体座的一侧且连接弹性杆。远程接收器耦接于驱动组件。在远程模式下,远程接收器适于接收信号以启动驱动组件,并通过弹性杆带动锁舌相对主体座转向,以切换为锁固状态或解锁状态。
6.在本发明的实施例中,驱动组件包括马达、转盘以及连杆,转盘配置在马达的转轴,连杆枢接于转盘的偏心处且抵靠弹性杆,马达的转轴适于带动转盘沿轴向转动,连杆随着转盘偏心转动而相对靠近或相对远离主体座。
7.在本发明的实施例中,当连杆相对靠近主体座时,压缩弹性杆且弹性杆带动锁舌朝第一旋转方向枢转,以切换为锁固状态,当连杆相对远离主体座时,弹性杆弹性恢复且带动锁舌朝相反于第一旋转方向的第二旋转方向枢转,以切换为解锁状态。
8.在本发明的实施例中,其中连杆包括偏心块、枢接部及夹持部,偏心块配置在转盘的外周缘,枢接部枢接于偏心块,夹持部螺合于枢接部远离偏心块的一端且具有凹槽,弹性杆部份位于凹槽中。
9.在本发明的实施例中,其中主体座具有套筒,弹性杆穿设于套筒,且适于沿着套筒直线滑动。
10.在本发明的实施例中,其中在手动模式下,弹性杆沿着套筒朝第一方向或是相反于第一方向的第二方向滑动,以带动锁舌相对主体座转向并切换为锁固状态或解锁状态。
11.在本发明的实施例中,其中锁舌的自由端形成有套环且第一柱体枢设于套环中,弹性杆的一端连接于第一柱体,当弹性杆带动第一柱体时,锁舌的自由端适于相对第一柱体转向。
12.在本发明的实施例中,其中锁舌具有穿孔,主体座具有第二柱体,锁舌的穿孔套设
于第二柱体且适于以第二柱体为中心相对主体座转向,使锁舌的卡合端突出在主体座外或是交叠于主体座的顶面。
13.在本发明的实施例中,还包括连接支架与多个螺栓,连接支架配置于主体座上,多个螺栓穿设于连接支架的第一端与主体座,以将连接支架与主体座连接为一体,连接支架的第二端容纳驱动组件。
14.在本发明的实施例中,还包括插座,配置于连接支架且耦接驱动组件,适于耦接外部电源且供应电能至驱动组件。
15.基于上述,本发明的电动锁具通过远程的控制器传递无线信号至远程接收器,藉此启动驱动组件,并通过弹性杆带动锁舌相对主体座转向,以切换为锁固状态或解锁状态。藉此取代现有的手动解锁的锁具,故能改善动作繁琐且使用不便的缺点。
16.此外,本发明的电动锁具也保留手动解锁的功能,在远程控制损坏的情形下,仍可通过手动方式上锁或解锁电动锁具,而具有使用上的便利性。
附图说明
17.包含附图以便进一步理解本发明,且附图并入本说明书中并构成本说明书的一部分。附图说明本发明的实施例,并与描述一起用于解释本发明的原理。
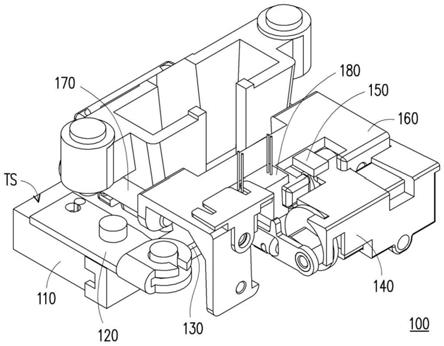
18.图1a是依照本发明的实施例的一种电动锁具的立体示意图;
19.图1b是图1a的电动锁具的组件分解示意图;
20.图2a是图1a的电动锁具的解锁状态示意图;
21.图2b是图2a的电动锁具在远程模式下的解锁状态动作图;
22.图2c是图2a的电动锁具在手动模式下的解锁状态动作图。
23.附图标号说明
24.100:电动锁具;
25.110:主体座;
26.111:套筒;
27.120:锁舌;
28.130:弹性杆;
29.140:驱动组件;
30.141:马达;
31.142:转盘;
32.143:连杆;
33.150:远程接收器;
34.160:连接支架;
35.170:螺栓;
36.180:插座;
37.e1:第一端;
38.e2:第二端;
39.fe:自由端;
40.ts:顶面。
具体实施方式
41.现将详细地参考本发明的示范性实施例,示范性实施例的实例说明于附图中。只要有可能,相同组件符号在附图和描述中用来表示相同或相似部分。
42.图1a是依照本发明的一实施例的一种电动锁具的立体示意图。图1b是图1a的电动锁具的组件分解示意图。图2a是图1a的电动锁具的解锁状态示意图。图2b是图2a的电动锁具在远程模式下的解锁状态动作图。图2c是图2a的电动锁具在手动模式下的解锁状态动作图。
43.参考图1a及图1b,本实施例的电动锁具100适用于电动机车或燃油机车的车箱。电动锁具100包括主体座110、锁舌120、弹性杆130、驱动组件140以及远程接收器150。
44.主体座110适于固定在车箱(未示于图中)的内壁面。锁舌120可枢转地配置在主体座110的顶面ts且用以卡固座垫上的扣件(未示于图中)。
45.弹性杆130可移动地穿设于主体座110的套筒111且连接锁舌120的自由端fe。详细而言,套筒111配置在主体座110相对锁舌120的一侧且悬空于顶面ts,弹性杆130穿设于套筒111且适于沿着套筒111直线滑动,进而带动锁舌120。
46.驱动组件140配置在主体座110的一侧且连接弹性杆130,其中驱动组件140是通过外部电力的供应而自动运作。远程接收器150耦接于驱动组件140且用以接收无线信号(包括红外线、蓝牙、rfid或其它类似的无线传输技术)。在远程模式下,远程接收器150适于接收远程控制器(未示于图中)的信号以启动驱动组件140,并通过弹性杆130带动锁舌120相对主体座110转向,以切换为锁固状态或解锁状态。
47.参考图1a及图1b,还包括连接支架160、多个螺栓170以及插座180。连接支架160配置于主体座110上且多个螺栓170穿设于连接支架160的第一端e1与主体座110,以将连接支架160与主体座110连接为一体。连接支架160的第二端e2形成容纳空间as以容纳并卡接驱动组件140。插座180配置于连接支架160且耦接驱动组件140,用以耦接外部电源且供应电能至驱动组件140。
48.参考图1a、图1b及图2a,驱动组件140包括马达141、转盘142以及连杆143。转盘142配置在马达141的转轴sf。连杆143枢接于转盘142的偏心处且抵靠部份的弹性杆130。其中,马达141的转轴sf适于带动转盘142沿轴向ad转动,例如是顺时针旋转或逆时针旋转,由于连杆143枢接在转盘142的偏心处,故连杆143将随着转盘142偏心转动而相对靠近主体座110以压缩弹性杆130或相对远离主体座110以释放弹性杆130。
49.详细而言,连杆143包括偏心块1431、枢接部1432及夹持部1433。偏心块1431配置在转盘142的外周缘,枢接部1432枢接于偏心块1431,夹持部1433螺合于枢接部1432远离偏心块1431的一端且夹持部1433具有凹槽g。弹性杆130部份位于凹槽g中。
50.补充而言,夹持部1433具有螺合结构且枢接部1432具有螺孔,通过螺合结构与螺孔的结合可手动调整夹持部1433与枢接部1432的长度尺寸,以符合弹性杆130的弹性强度。
51.在远程模式下,远程接收器150启动驱动组件140,马达141的转轴sf带动转盘142朝顺时针或逆时针枢转。
52.在转动过程中,参考图2a至图2b,当连杆143相对靠近主体座110时,夹持部1433压缩弹性杆130,使得弹性杆130产生变形并带动锁舌120相对主体座110朝第一旋转方向t1枢转,以切换为锁固状态(即锁舌120的卡合端ge突出在主体座110外)。
53.参考图2b至图2a,当连杆143相对远离主体座110时,夹持部1433解除推抵弹性杆130,则弹性杆130弹性恢复且带动锁舌120相对主体座110朝相反于第一旋转方向t1的第二旋转方向t2枢转,以切换为解锁状态(即锁舌120的卡合端ge交叠在主体座110上方)。
54.参考图2a及图2c,在手动模式下,远程接收器150与驱动组件140并未启动。用户可通过外力,拉动弹性杆130沿着套筒111的轴向ad朝第一方向d1直线滑动,藉此带动锁舌120相对主体座110朝第一旋转方向t1转向并切换为锁固状态(即锁舌120的卡合端ge突出在主体座110外)。
55.反之,用户可通过外力推动弹性杆130沿着套筒111的轴向ad朝相反于第一方向d1的第二方向d2滑动,藉此带动锁舌120相对主体座110朝第二旋转方向t2转向并切换为解锁状态(即锁舌120的卡合端ge交叠在主体座110上方)。
56.补充而言,弹性杆130适于在夹持部1433的凹槽g中沿轴向ad滑动而互不干涉。
57.参考图1a及图1b,锁舌120的自由端fe形成有套环121且第一柱体b1枢设于套环121中,弹性杆130的一端e1连接于第一柱体b1。当弹性杆130沿着轴向ad带动第一柱体b1时,锁舌120的自由端fe适于相对第一柱体b1转向且受到第一柱体b1的带动以相对主体座110左右摆动(见图2a及图2c)。
58.锁舌120具有穿孔th,成形在锁舌120的中央处。主体座110具有第二柱体b2,成形在顶面ts上。锁舌120的穿孔th套设于第二柱体b2且适于以第二柱体b2为中心相对主体座110转向,使锁舌120的卡合端ge突出在主体座110外或是交叠于主体座110的顶面ts。
59.综上所述,本发明的电动锁具通过远程的控制器传递无线信号至远程接收器,藉此启动驱动组件,并通过弹性杆带动锁舌相对主体座转向,以切换为锁固状态或解锁状态。藉此取代现有的手动解锁的锁具,故能改善动作繁琐且使用不便的缺点。
60.此外,本发明的电动锁具也保留手动解锁的功能,在远程控制损坏的情形下,仍可通过手动方式上锁或解锁电动锁具,而具有使用上的便利性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1