一种机器人操作装置及方法与流程
1.本发明涉及机器人手动操作领域,具体涉及一种机器人操作装置及方法。
背景技术:
2.例如,在工业用的机器人系统中,能够通过手动方式使机器人动作(手工操作)。这样的动作例如被用于进行示教作业(示教)等时。此时,用户使用连接在对机器人进行控制的控制器上的盒体(示教盒)等,以手动方式进行机器人的操作。为此,在盒体上设置有用于进行手动操作的专用的各种操作键(由机械开关构成的键)。
技术实现要素:
3.为了解决上述技术问题,本发明设计了一种机器人操作装置
4.本发明所采取的具体技术方案为:一种机器人操作装置,所述操作装置包括:
5.指令输入模块,用于从用户处接受触摸操作输入,至少具有相交的第一拖曳方向和第二拖曳方向;
6.驱动轴,包括所述第一拖曳方向的第一驱动轴和与第二拖曳方向相关联的第二驱动轴;
7.触摸操作检测模块,用于检测触摸操作是否为拖曳操作;
8.动作指令产生模块,用于从用户处接受操作指令的输入,并选择驱动轴的至少一个执行动作指令;
9.其中,
10.根据所述触摸操作检测模块的检测结果,生成用于驱动所述第一驱动轴和第二驱动轴的动作指令;
11.若是拖曳操作,则判断拖曳操作是否处于第一拖曳方向或第二拖曳方向,如果拖曳操作在第一拖曳方向上,则运动命令生成模块根据拖曳操作驱动与第一拖曳方向上的拖曳操作相关联的第一驱动轴,并且生成动作指令;如果如果拖曳操作在第二拖曳方向,则运动命令根据拖曳操作驱动与第二拖曳方向上的拖曳操作相关联的第二驱动轴,并且生成动作指令。
12.如上所述的机器人操作装置,作为优选地,指令输入模块为触摸面板。
13.如上所述的机器人操作装置,作为优选地,所述触摸操作检测模块与所述触摸面板一体设置或者独立于所述触摸面板设置,以检测来自用户的操作。
14.如上所述的机器人操作装置,作为优选地,第一拖曳方向和第二拖曳方向相交形成拖曳坐标系;
15.若是拖曳操作处于第一拖曳方向和第二拖曳方向所形成的坐标系的任一象限,则运动命令生成模块根据拖曳操作所处任一象限的拖曳方向同时驱动第一驱动轴和第二驱动轴,并且生成动作指令,以使第一驱动轴和第二驱动轴组合沿拖曳方向进行驱动。
16.如上所述的机器人操作装置,作为优选地,所述第一拖曳方向为所述触摸面板上
的横向,所述第二拖曳方向为所述触摸面板上的纵向。
17.如上所述的机器人操作装置,作为优选地,所述指令输入模块至少具有:用于从用户处接受触摸操作输入的触摸屏;用户手持的壳体;用于按钮操作的设置于触摸屏范围以外的多个按钮;
18.其中,触摸面板上具有多个用于按钮操作的虚拟按钮。
19.如上所述的机器人操作装置,作为优选地,所述触摸操作检测模块还可检测对显示在所述触摸面板上的虚拟按钮或所述触摸面板之外的按钮所进行的操作;所述触摸面板上的按钮或所述触摸面板之外的按钮所进行的操作的优先级大于拖曳操作。
20.一种机器人操作方法,所述方法包括以下步骤:
21.s1,指令输入模块从用户处接受触摸操作输入,其中,所述指令输入模块至少具有相交的第一拖曳方向和第二拖曳方向;
22.s2,使所述第一拖曳方向的第一驱动轴和与第二拖曳方向相关联的第二驱动轴;
23.s3,检测触摸操作是否为拖曳操作;
24.s4,从用户处接受操作指令的输入,并选择驱动轴的至少一个执行动作指令;
25.其中,
26.根据所述检测结果,生成用于驱动所述第一驱动轴和第二驱动轴的动作指令;若是拖曳操作,则判断拖曳操作是否处于第一拖曳方向或第二拖曳方向,如果拖曳操作在第一拖曳方向上,则运动命令生成模块根据拖曳操作驱动与第一拖曳方向上的拖曳操作相关联的第一驱动轴,并且生成动作指令;如果如果拖曳操作在第二拖曳方向,则运动命令根据拖曳操作驱动与第二拖曳方向上的拖曳操作相关联的第二驱动轴,并且生成动作指令。
27.如上所述的机器人操作方法,作为优选地,所述指令输入模块为触摸面板。
28.如上所述的机器人操作方法,作为优选地,所述触摸操作检测模块与所述触摸面板一体设置或者独立于所述触摸面板设置,以检测来自用户的操作。
29.如上所述的机器人操作方法,作为优选地,所述第一拖曳方向为所述触摸面板上的横向,所述第二拖曳方向为所述触摸面板上的纵向。
30.有益技术效果:通过手动操作进行指令输入,使机器人按照手势拖曳方向进行运转。
附图说明
31.构成本申请的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
32.其中:
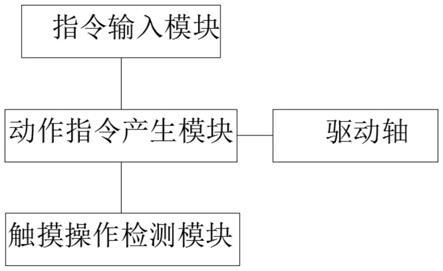
33.图1是本申请实施例中所提供操作机器人装置的线框图。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.在本发明的描述中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明而不是要求本发明必须以特定的方位构造和操作,因此不能理解为对本发明的限制。本发明中使用的术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是直接相连,也可以通过中间部件间接相连,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
36.一种机器人操作装置,所述操作装置包括:
37.指令输入模块,用于从用户处接受触摸操作输入,至少具有相交的第一拖曳方向和第二拖曳方向;
38.驱动轴,包括所述第一拖曳方向的第一驱动轴和与第二拖曳方向相关联的第二驱动轴;
39.触摸操作检测模块,用于检测触摸操作是否为拖曳操作;
40.动作指令产生模块,用于从用户处接受操作指令的输入,并选择驱动轴的至少一个执行动作指令;
41.其中,
42.根据所述触摸操作检测模块的检测结果,生成用于驱动所述第一驱动轴和第二驱动轴的动作指令;
43.若是拖曳操作,则判断拖曳操作是否处于第一拖曳方向或第二拖曳方向,如果拖曳操作在第一拖曳方向上,则运动命令生成模块根据拖曳操作驱动与第一拖曳方向上的拖曳操作相关联的第一驱动轴,并且生成动作指令;如果如果拖曳操作在第二拖曳方向,则运动命令根据拖曳操作驱动与第二拖曳方向上的拖曳操作相关联的第二驱动轴,并且生成动作指令。
44.通过手动操作进行指令输入,使机器人按照手势拖曳方向进行运转。手指划过触摸屏,通过检测是否为拖曳以形成动作指令,设置触摸操作检测模块,避免发生误操作,提高操作的精确度,同时设置基于拖曳方向生成动作指令,以使机器人安装拖曳方向进行运转。
45.在一些实施例中,指令输入模块为触摸面板。设置触摸面板为指令输入模块,便于进行使用。
46.在一些实施例中,所述触摸操作检测模块与所述触摸面板一体设置或者独立于所述触摸面板设置,以检测来自用户的操作。
47.本发明还具有如下实施方式,第一拖曳方向和第二拖曳方向相交形成拖曳坐标系;
48.若是拖曳操作处于第一拖曳方向和第二拖曳方向所形成的坐标系的任一象限,则运动命令生成模块根据拖曳操作所处任一象限的拖曳方向同时驱动第一驱动轴和第二驱动轴,并且生成动作指令,以使第一驱动轴和第二驱动轴组合沿拖曳方向进行驱动。
49.第一拖曳方向和第二拖曳方向形成坐标系,当拖曳方向位于任何一个象限中时,根据该拖曳路径在该象限中的位置,第一驱动轴和第二驱动轴进行组合驱动,保证驱动方向与拖曳方向相一致。
50.在一些实施例中,所述第一驱动轴和第二驱动轴分别连接驱动轮,通过控制两驱
动轮转动速度相差差速,以实现上述沿拖曳方向进行驱动的目的。
51.在一些实施例中,进行拖曳方向预设,具体地,所述第一拖曳方向为所述触摸面板上的横向,所述第二拖曳方向为所述触摸面板上的纵向。
52.本发明还具有如下实施方式,所述指令输入模块至少具有:用于从用户处接受触摸操作输入的触摸屏;用户手持的壳体;用于按钮操作的设置于触摸屏范围以外的多个按钮;
53.其中,触摸面板上具有多个用于按钮操作的虚拟按钮。设置虚拟按钮与按钮,能够实现多种指令输入方式。
54.本发明还具有如下实施方式,所述触摸操作检测模块还可检测对显示在所述触摸面板上的虚拟按钮或所述触摸面板之外的按钮所进行的操作;所述触摸面板上的按钮或所述触摸面板之外的按钮所进行的操作的优先级大于拖曳操作。由于按钮相对触摸面板的精确度更高,因此以按钮操作为最高优先级,保证操作精度。
55.一种机器人操作方法,所述方法包括以下步骤:
56.s1,指令输入模块从用户处接受触摸操作输入,其中,所述指令输入模块至少具有相交的第一拖曳方向和第二拖曳方向;
57.s2,使所述第一拖曳方向的第一驱动轴和与第二拖曳方向相关联的第二驱动轴;
58.s3,检测触摸操作是否为拖曳操作;
59.s4,从用户处接受操作指令的输入,并选择驱动轴的至少一个执行动作指令;
60.其中,
61.根据所述检测结果,生成用于驱动所述第一驱动轴和第二驱动轴的动作指令;若是拖曳操作,则判断拖曳操作是否处于第一拖曳方向或第二拖曳方向,如果拖曳操作在第一拖曳方向上,则运动命令生成模块根据拖曳操作驱动与第一拖曳方向上的拖曳操作相关联的第一驱动轴,并且生成动作指令;如果如果拖曳操作在第二拖曳方向,则运动命令根据拖曳操作驱动与第二拖曳方向上的拖曳操作相关联的第二驱动轴,并且生成动作指令。
62.通过手动操作进行指令输入,使机器人按照手势拖曳方向进行运转。手指划过触摸屏,通过检测是否为拖曳以形成动作指令,设置触摸操作检测模块,避免发生误操作,提高操作的精确度,同时设置基于拖曳方向生成动作指令,以使机器人安装拖曳方向进行运转。
63.在一些实施例中,所述指令输入模块为触摸面板。所述触摸操作检测模块与所述触摸面板一体设置或者独立于所述触摸面板设置,以检测来自用户的操作。
64.所述第一拖曳方向为所述触摸面板上的横向,所述第二拖曳方向为所述触摸面板上的纵向。
65.需要说明的是,本说明书中的各个实施例均采用递进的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其它实施例的不同之处。可以根据实际的需要选择其中的部分或者全部模块来实现本实施例方案的目的。本领域普通技术人员在不付出创造性劳动的情况下,即可以理解并实施。
66.以上实施方式仅用于说明本申请实施例,而非对本申请实施例的限制,有关技术领域的普通技术人员,在不脱离本申请实施例的精神和范围的情况下,还可以做出各种变化和变型,因此所有等同的技术方案也属于本申请实施例的范畴,本申请实施例的专业保
护范围应由权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1