一种便于冲压工件快速准确上下料的端拾器的制作方法
[0001]
本实用新型涉及冲压件上下料领域,尤其涉及一种便于冲压工件快速准确上下料的端拾器。
背景技术:
[0002]
冲压件在进行加工时,需要进行多道工序,加工过程中需要不断进行工件的上下料,原有的此类工作是使用人工进行冲压各工序工件的上下料,使得生产效率低,人工成本高,员工劳动强度大、错误率高。现有的端拾器大多是通过真空设备吸取工件,端拾器上的夹具位置一般固定,与加工设备上的工件位置容易出现误差,不易调节,并且端拾器使用完后放置不方便,放在箱内再次使用时比较麻烦。
技术实现要素:
[0003]
本实用新型旨在解决现有技术的不足,而提供一种便于冲压工件快速准确上下料的端拾器。
[0004]
本实用新型为实现上述目的,采用以下技术方案:一种便于冲压工件快速准确上下料的端拾器,包括安装板、安装在安装板上的气动夹爪以及连接机器人手臂与安装板的气动快换盘,其特征在于,所述气动快换盘一侧连接在机器人手臂上,所述气动快换盘另一侧固接有法兰盘,所述法兰盘与所述安装板垂直,且所述法兰盘和所述安装板的上下两夹角处侧壁之间固接有l形支座,所述安装板底部靠近所述支座一侧水平固接有垫轴,所述安装板顶部远离所述气动快换盘一侧设有若干通孔,所述通孔边缘的所述安装板顶部安装有气爪安装板,所述气动夹爪顶部穿过所述通孔与所述气爪安装板底部固接,所述安装板顶部安装有与所述气爪安装板对应的微调机构,所述安装板靠近所述气动夹爪一侧中间安装有检测机构。
[0005]
特别的,所述气动夹爪的一个夹爪上安装有检测工件有无的接近传感器。
[0006]
特别的,所述微调机构包括调节块、紧固螺栓,所述调节块安装在靠近所述气爪安装板相邻两侧的所述安装板顶部,所述气爪安装板顶部四角处设有圆孔,所述安装板顶部设有与所述圆孔对应的螺纹孔一,所述圆孔和所述螺纹孔一内同轴旋有微调螺栓,所述调节块与所述气爪安装板的相对面上设有螺纹孔二,所述紧固螺栓末端旋进所述螺纹孔二后与所述气爪安装板侧壁接触。
[0007]
特别的,所述检测机构包括门锁安装板、定位销、检测门锁,所述门锁安装板安装在所述安装板靠近所述气动夹爪一侧中间,并通过所述定位销固定,所述检测门锁安装在所述门锁安装板顶部。
[0008]
本实用新型的有益效果是:本实用新型结构简单,通过设置安装板、气动夹爪、气动快换盘、垫轴、调节机构、检测机构、接近传感器,端拾器与机器人手臂连接方便,气动夹爪便于微调,减小误差,避免人工机械重复操作,降低员工劳动强度,提高生产效率;同时,垫轴的设置,使得端拾器使用完后放置方便,并且检测机构便于及时检测放置架上是否空
置,防止出现问题。
附图说明
[0009]
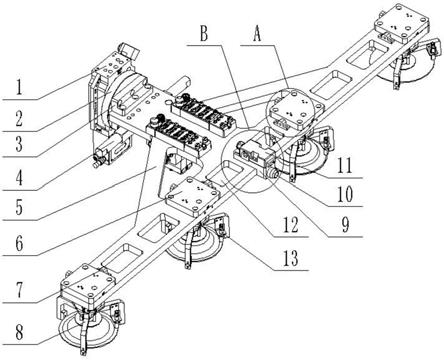
图1为本实用新型的结构示意图;
[0010]
图2为本实用新型的图1中a的放大示意图;
[0011]
图3为本实用新型的图1中b的放大示意图;
[0012]
图中:1-气动快换盘;2-法兰盘;3-支座;4-垫轴;5-安装板;6-气爪安装板;7-调节块;8-气动夹爪;9-门锁安装板;10-定位销;11-检测门锁;12-通孔;13-接近传感器;14-螺纹孔二;15-圆孔;
[0013]
以下将结合本实用新型的实施例参照附图进行详细叙述。
具体实施方式
[0014]
下面结合附图和实施例对本实用新型作进一步说明:
[0015]
如图1-3所示,一种便于冲压工件快速准确上下料的端拾器,包括安装板5、安装在安装板5上的气动夹爪8以及连接机器人手臂与安装板5的气动快换盘1,其特征在于,所述气动快换盘1一侧连接在机器人手臂上,所述气动快换盘1另一侧固接有法兰盘2,所述法兰盘2与所述安装板5垂直,且所述法兰盘2和所述安装板5的上下两夹角处侧壁之间固接有l形支座3,所述安装板5底部靠近所述支座3一侧水平固接有垫轴4,所述安装板5顶部远离所述气动快换盘1一侧设有若干通孔12,所述通孔12边缘的所述安装板5顶部安装有气爪安装板6,所述气动夹爪8顶部穿过所述通孔12与所述气爪安装板6底部固接,所述安装板5顶部安装有与所述气爪安装板6对应的微调机构,所述安装板5靠近所述气动夹爪8一侧中间安装有检测机构。
[0016]
特别的,所述气动夹爪8的一个夹爪上安装有检测工件有无的接近传感器13。
[0017]
特别的,所述微调机构包括调节块7、紧固螺栓,所述调节块7安装在靠近所述气爪安装板6相邻两侧的所述安装板5顶部,所述气爪安装板6顶部四角处设有圆孔15,所述安装板5顶部设有与所述圆孔15对应的螺纹孔一,所述圆孔15和所述螺纹孔一内同轴旋有微调螺栓,所述调节块7与所述气爪安装板6的相对面上设有螺纹孔二14,所述紧固螺栓末端旋进所述螺纹孔二14后与所述气爪安装板6侧壁接触。
[0018]
特别的,所述检测机构包括门锁安装板9、定位销10、检测门锁11,所述门锁安装板9安装在所述安装板5靠近所述气动夹爪8一侧中间,并通过所述定位销10固定,所述检测门锁11安装在所述门锁安装板9顶部。
[0019]
本实用新型工作时,机器人手臂与该端拾器通过气动快换盘1连接,并调节调节块7上的紧固螺栓对气动夹爪8进行微调,使气动夹爪8与加工设备上放置工件的模具相对应,通过机器人手臂将端拾器移至工件上方,通过接近传感器13检测工件的有无,有工件,则启动气动夹爪8,将工件抓起并移至加工设备上相应的模具内,工件加工完成后,将端拾器移至放置架上,且摆放端拾器的放置架上安装有与检测门锁11匹配的钥匙,放置时,放置架上的钥匙会插入检测门锁11内,插进去之后,就会发出一个信号,说明此放置架已经有端拾器摆放,可以防止发生碰撞,同时,端拾器通过垫轴4悬挂住。本实用新型结构简单,端拾器与机器人手臂连接方便,气动夹爪8便于微调,减小误差,避免人工机械重复操作,降低员工劳
动强度,提高生产效率,且端拾器使用完后放置方便。
[0020]
上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种改进,或未经改进直接应用于其它场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1