一种连杆式升降机械手的制作方法
[0001]
本实用新型涉及一种连杆式升降机械手,属于油田修井技术领域。
背景技术:
[0002]
油田修井时需要将石油油管先逐段旋松再从油井中取出,如油管不同心,会造成油管上螺纹的乱牙,导致油管无法旋紧或旋松。
[0003]
现阶段石油油管的旋接都是由人工完成油管同心度的调整,存在效率慢,人工成本高以及安全隐患的缺陷。
技术实现要素:
[0004]
本实用新型提供一种连杆式升降机械手用来克服现有技术中石油油管人工校准操作中存在安全隐患的缺陷。
[0005]
为了解决上述技术问题,本实用新型提供了如下的技术方案:
[0006]
本实用新型公开了一种连杆式升降机械手,包括活动底板,升降立柱,摆臂旋转座,带位置传感器油缸,摆臂连接座,抓手与摆臂组件;
[0007]
所述活动底板的上端与升降立柱通过摆臂旋转座连接,所述摆臂旋转座与摆臂组件的一端连接,所述摆臂组件的另一端与摆臂连接座连接,所述摆臂组件的一侧设有油缸,其另一侧设有抓手,所述抓手内设有薄型油缸。
[0008]
进一步的,所述活动底板下方设有导轨,使其工作过程中可以实现微调。
[0009]
进一步的,所述油缸带有位置传感器功能,并与第二摆臂相连,工作时推动摆臂组件,使其实现抓手的来回往复运动。
[0010]
进一步的,所述摆臂连接座上开设有两段间隔的滑槽,从动杆可在其内部滑动。
[0011]
进一步的,所述摆臂旋转座的下方装有两个深沟球轴承,安装在升降立柱上,可沿其垂线方向做向下翻转运动,实现垂线方向的折叠功能,方便运输。
[0012]
进一步的,所述抓手由薄型油缸控制其开合动作,抓手上带有可拆卸式橡胶垫,有效防止管壁损伤。
[0013]
本实用新型所达到的有益效果是:本装置代替人工校准油管的同心度,具有运行速度快,位置精准稳定的特点,机械手采用的是连杆机构,运行稳定可靠,降低制作成本,减小人员安全隐患。
附图说明
[0014]
附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
[0015]
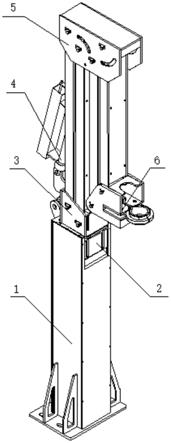
图1是本实用新型的整体结构示意图;
[0016]
图2是本实用新型摆臂组件的结构示意图;
[0017]
图3是本实用新型摆臂组件的展开示意图;
[0018]
图4是本实用新型摆臂组件的收起示意图。
[0019]
图中:1、活动底板;2、升降立柱;3、摆臂旋转座;4、油缸; 5、摆臂连接座;6、抓手;7、摆臂组件;71、第一摆臂;72、第二摆臂;73、第三摆臂;74、第四摆臂;75、从动杆。
具体实施方式
[0020]
以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
[0021]
实施例1
[0022]
如图1-4所示,一种连杆式升降机械手,包括活动底板1,升降立柱2,摆臂旋转座3,带位置传感器油缸4,摆臂连接座5,抓手6 与摆臂组件7;
[0023]
所述活动底板1的上端与升降立柱2通过摆臂旋转座3连接,所述摆臂旋转座3与摆臂组件7的一端连接,所述摆臂组件7的另一端与摆臂连接座5连接,所述摆臂组件7的一侧设有油缸4,其另一侧设有抓手6,所述抓手6内设有薄型油缸;
[0024]
所述摆臂组件7包括第一摆臂71、第二摆臂72、第三摆臂73、第四摆臂74和从动杆75,其中第一摆臂71与第二摆臂72为一组,第三摆臂73和第四摆臂74为一组。
[0025]
具体的,所述摆臂连接座5上开设有两段间隔的滑槽,从动杆75可在其内部滑动。
[0026]
具体的,所述活动底板1下方设有导轨,使其工作过程中可以实现微调。
[0027]
具体的,所述升降立柱2的升降功能由油缸4实现。
[0028]
具体的,所述摆臂旋转座3的下方装有两个深沟球轴承,安装在升降立柱2上,可沿其垂线方向做向下翻转运动,实现垂线方向的折叠功能,方便运输。
[0029]
具体的,所述油缸4带有位置传感器功能,并与第二摆臂2相连,工作时推动摆臂组件7,使之实现抓手的来回往复运动。
[0030]
具体的,所述摆臂连接座5可以使摆臂之间形成连杆机构,提高工作效率。
[0031]
具体的,抓手6由薄型油缸控制其开合动作,抓手6上带有可拆卸式橡胶垫,有效防止管壁损伤。
[0032]
工作时,当机械手处于等待位时,带位置传感器油缸处于缩回状态,此时四个力臂垂直于地面。
[0033]
工作原理:如图3所示,接管时,薄型油缸伸出控制抓手6张开,带位置传感器的油缸4伸出推动第二摆臂72前伸,此时,第二摆臂 72通过从动杆75在摆臂连接座5的滑槽内滑动,从而推动第四摆臂 74运动,由于第一摆臂71、第二摆臂72与第三摆臂73、第四摆臂 74属于两组铰链连接的连杆机构,会一直处于相对平行状态,故会带动抓手6水平向前移动,当带位置传感器的油缸4伸出至最大时,等待油管进入抓手6中,当油管碰到抓手6时,薄型油缸缩回,抓手 6闭合抱住油管。
[0034]
如图4所示,带位置传感器的油缸4会缩回至井口位,等待油管上扣,当油管上扣完成时,薄型油缸伸出,抓手6张开,带位置传感器的油缸4缩回至原始位,等待下一次接管。
[0035]
最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均
应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1