一种多功能抓取用机械手的制作方法
[0001]
本实用新型涉及机械手领域,尤其涉及一种多功能抓取用机械手。
背景技术:
[0002]
现有用于抓取的机械手抓取功能较单一,比如,抓箱式物体的机械手不适用于抓取筒式物体类。
技术实现要素:
[0003]
本实用新型要解决的技术问题是提供一种多功能抓取用机械手,该机械手既能抓取箱式物体又可以抓取筒式物体。
[0004]
为了解决上述技术问题,本实用新型采用如下技术方案:
[0005]
一种多功能抓取用机械手,包括机械臂,所述机械臂的末端上安装有抓取装置,所述抓取装置包括顶板、置于顶板上端面中心与所述机械臂的末端连接的连接座、置于顶板下方的横撑组件和吸附组件,所述顶板的下端面上设有安装座,所述安装座的顶端面开设圆台形安装槽,所述安装槽内转动设有转盘,所述转盘的底端面是上设有盘丝平面螺纹,所述安装槽的底面上以安装槽轴心对称设有多条滑槽,多条所述滑槽分别向外延伸并贯通所述安装座的侧壁,所述横撑组件包括滑动设于滑槽内的滑板和连接在滑板外端上的撑板,所述滑板的顶面上设有与所述盘丝平面螺纹相配合的凸齿,所述吸附组件包括置于顶板上的真空泵、连接管和多个通过连接管与所述真空泵连通的真空吸盘,多个所述真空吸盘设置在所述安装座的底端面上。
[0006]
进一步地,所述转盘的外壁上设有凸环,所述凸环搭载在所述安装槽内的台面上,所述转盘的顶端面中心上设有转轴,所述顶板的底端面上设有套设在转轴一端上的轴承座,所述转盘的顶端面上沿周向设有内齿环,所述顶板的顶端面上还设有电机,所述电机的动力输出端穿过顶板并在其端部上设有与所述内齿环啮合的齿轮。
[0007]
进一步地,所述安装座为矩形,所述滑槽为四条、呈“十”字型分布。
[0008]
进一步地,所述撑板为弧形。
[0009]
进一步地,所述连接座与安装座同轴设置,所述连接座、顶板、转轴、转盘以及安装座同轴设有连通孔,所述安装座的内底部设有真空容置腔,该真空容置腔与所述连通孔连通,所述连接管的一端连接在真空容置腔内,所述连接管的另一端穿过连通孔并穿出连接座侧壁与所述真空泵连接,所述真空容置腔与所述安装座的底端面之间设有多个安装所述真空吸盘的安装孔。
[0010]
本实用新型的有益效果:本实用新型中的抓取装置包括横撑组件和吸附组件,两者均装配在同一安装座上,相互运动不会形成干涉,结构设计合理,横撑组件通过涨紧的方式抓取筒式物体,吸附组件通过真空吸附的方式抓取箱式物体,以此达到抓取装置的多功能的抓取效果。
附图说明
[0011]
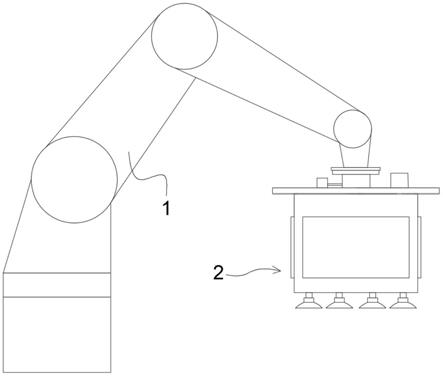
图1为本实用新型的结构示意图。
[0012]
图2为抓取装置的结构示意图。
[0013]
图3为横撑组件的俯视示意图。
[0014]
附图标记说明:
[0015]
1-机械臂;2-抓取装置;21-顶板;22-连接座;231-滑板;232-撑板;233-凸齿;241-真空泵;242-连接管;243-真空吸盘;25-安装座;251-安装槽;252-转盘;253-盘丝平面螺纹;254-滑槽;255-凸环;256-转轴;257-内齿环;258-电机;259-齿轮;26-真空容置腔;261-安装孔;27-连通孔。
具体实施方式
[0016]
为了便于本领域技术人员的理解,下面结合实施例与附图对本实用新型作进一步的说明,实施方式提及的内容并非对本实用新型的限定。
[0017]
如图1至图3所示,一种多功能抓取用机械手,包括机械臂1,所述机械臂1的末端上安装有抓取装置2,所述抓取装置2包括顶板21、置于顶板21上端面中心与所述机械臂1的末端连接的连接座22、置于顶板21下方的横撑组件和吸附组件,所述顶板21的下端面上设有安装座25,所述安装座25的顶端面开设圆台形安装槽251,所述安装槽251内转动设有转盘252,所述转盘252的底端面是上设有盘丝平面螺纹253,所述安装槽251的底面上以安装槽251轴心对称设有多条滑槽254,多条所述滑槽254分别向外延伸并贯通所述安装座25的侧壁,所述横撑组件包括滑动设于滑槽254内的滑板231和连接在滑板231外端上的撑板232,所述滑板231的顶面上设有与所述盘丝平面螺纹253相配合的凸齿233,所述吸附组件包括置于顶板21上的真空泵241、连接管242和多个通过连接管242与所述真空泵241连通的真空吸盘243,多个所述真空吸盘243设置在所述安装座25的底端面上。
[0018]
上述技术方案中,由于滑板231上的凸齿233与转盘252上的盘丝平面螺纹253配合,当转盘252转动时,可带动多个滑板231在滑槽254内里外滑动,进而带动多个撑板232向外延展与筒式物体的内环壁接触直至涨紧,驱动机械臂1移动筒式物体;另外抓取装置2的底部设置真空吸盘243与箱式物体接触,通过真空泵241抽取真空后致使真空吸盘243将箱式物体吸附,驱动机械臂1移动箱式物体。
[0019]
在本实施例中,所述转盘252的外壁上设有凸环255,所述凸环255搭载在所述安装槽251内的台面上,转盘252在安装槽251内悬空转动;为确保转盘252转动的同轴度,所述转盘252的顶端面中心上设有转轴256,所述顶板21的底端面上设有套设在转轴256一端上的轴承座,所述转盘252的顶端面上沿周向设有内齿环257,所述顶板21的顶端面上还设有电机258,所述电机258的动力输出端穿过顶板21并在其端部上设有与所述内齿环257啮合的齿轮259。电机258驱动齿轮259转动,带动转盘252转动从而带动滑板231滑动。
[0020]
在本实施例中,所述安装座25为矩形,所述滑槽254为四条、呈“十”字型分布。
[0021]
在本实施例中,所述撑板232为弧形。
[0022]
在本实施例中,为避免干涉,所述连接座22与安装座25同轴设置,所述连接座22、顶板21、转轴256、转盘252以及安装座25同轴设有连通孔27,所述安装座25的内底部设有真空容置腔26,该真空容置腔26与所述连通孔27连通,所述连接管242的一端连接在真空容置
腔26内,所述连接管242的另一端穿过连通孔27并穿出连接座22侧壁与所述真空泵241连接,所述真空容置腔26与所述安装座25的底端面之间设有多个安装所述真空吸盘243的安装孔261。
[0023]
本实施例中的所有技术特征均可根据实际需要而进行自由组合。
[0024]
上述实施例为本实用新型较佳的实现方案,除此之外,本实用新型还可以其它方式实现,在不脱离本技术方案构思的前提下任何显而易见的替换均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1