一种塑料提手生产线用吸盘机械手的制作方法
[0001]
本专利申请属于机械手技术领域,更具体地说,是涉及一种塑料提手生产线用吸盘机械手。
背景技术:
[0002]
塑料提手在生产过程中,机械手需要从模具中取出成组塑料提手,并放置工作台,由人工实现质量检测。其工作效率低,需要大量劳动力,且增加生产成本。为了解决上述问题,将现有塑料提手生产线中的机械手进行改造,在不影响其吸取提手的同时,增加背光功能和单个提手控制功能,以便于工业相机采集清晰的提手图像,为后续进行图像识别及检测奠定基础。目前企业生产线中用的机械手并不具备以上功能,而具有以上功能的塑料提手生产线用吸盘机械手对产品质检效率意义重大。
技术实现要素:
[0003]
本实用新型需要解决的技术问题是提供一种塑料提手生产线用吸盘机械手,这种带背光功能的吸盘机械手,通过在普通机械手上增加发光板,以补充光源,可以使用视觉图像采集器获取清晰的塑料提手图像。同时该机械手可控制单个塑料提手的吸放,为后续无人化分拣奠定基础。本实用新型与传统机械手相比,具有方便实用、效率高、即时性好、安全易操作的优点,特别适合替代大批量生产且人工分拣不良品的企业。
[0004]
为了解决上述问题,本实用新型所采用的技术方案是:
[0005]
一种塑料提手生产线用吸盘机械手,包括发光板、发光板支架、机械手本体、风管、连接软管、电磁阀、电气线路、双通吸嘴、单通吸嘴,其中:
[0006]
机械手本体上平行设置两列通孔,两列通孔分别用于安装单通吸嘴和双通吸嘴;机械手本体的上安装有发光板和风管,发光板和风管分别位于机械手本体的两侧;风管上连接有多个连接软管;机械手本体上安装多个电磁阀,所有电磁阀通过电气线路与控制设备连接;一个电磁阀、一个连接软管、一个单通吸嘴、一个双通吸嘴为一组吸附装置,每个电磁阀用于单独控制相应组的单通吸嘴和双通吸嘴的通断,一个单通吸嘴和一个双通吸嘴用以吸住一个提手。
[0007]
每组吸附装置中,单通吸嘴的一个吸气口通过连接软管与双通吸嘴的一个吸气口连接,双通吸嘴的另一个吸气口通过连接软管与电磁阀的进气口连接,电磁阀的出气口使用连接软管与风管连接。
[0008]
发光板上也具有两列通孔,两列通孔与单通吸嘴和双通吸嘴对应间隙配合。
[0009]
本实用新型技术方案的进一步改进在于:发光板设置在机械手本体外侧,发光板通过发光板支架安装在机械手本体上、并为视觉图像采集器提供光源。
[0010]
本实用新型技术方案的进一步改进在于:发光板尺寸小于机械手本体,发光板1为荧光导光板。
[0011]
本实用新型技术方案的进一步改进在于:发光板和发光板支架焊接连接。
[0012]
本实用新型技术方案的进一步改进在于:单通吸嘴包括真空吸盘和单通吸杆,真空吸盘和单通吸杆为过盈配合,单通吸杆设置在机械手本体上,真空吸盘与发光板上的一列通孔间隙配合。
[0013]
本实用新型技术方案的进一步改进在于:双通吸嘴包括真空吸盘和t型吸杆,真空吸盘和t型吸杆为过盈配合,t型吸杆设置在机械手本体上,真空吸盘与发光板上的另一列通孔间隙配合。
[0014]
本实用新型技术方案的进一步改进在于:风管通过上下两个固定扣固定在机械手本体上。
[0015]
本实用新型技术方案的进一步改进在于:固定扣为ω型。
[0016]
由于采用了上述技术方案,本实用新型取得的有益效果是:
[0017]
本实用新型的机械手上附有发光板,可给图像采集器提供光源,使视觉图像采集器提取到清晰的塑料提手图像,便于生成清晰的图像,快速识别不良品;同时机械手上安装电磁阀,每排单通吸嘴和双通吸嘴都是通过电磁阀独立控制,可实现单个或多个不良品的快速剔除。
[0018]
本实用新型结构简单,空间利用率高,能够为图像采集器提供集中的光线,使图像采集器采集到清晰的塑料提手图像,从而快速、准确地识别并剔除不良品。同时可代替人工操作,不但可以节省劳动力,还可以提高识别不良品的速度和失误率,与传统的生产方式相比,具有效率高、工作时间长的优点。特别适合于大批量生产的企业。
附图说明
[0019]
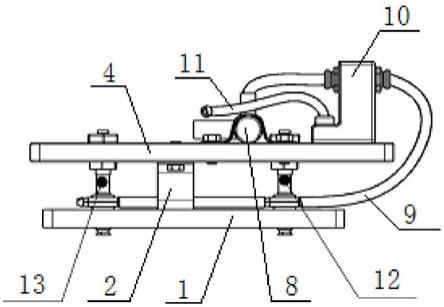
图1是本实用新型的正视结构示意图;
[0020]
图2是本实用新型的左视结构示意图;
[0021]
图3是本实用新型的后视结构示意图;
[0022]
图4是本实用新型的俯视结构示意图;
[0023]
图5是本实用新型的轴侧结构示意图;
[0024]
图6是本实用新型的双通吸嘴装置的正视图;
[0025]
图7是本实用新型的双通吸嘴装置的侧视图;
[0026]
图8是本实用新型的单通吸嘴装置的正视图;
[0027]
图9是本实用新型的单通吸嘴装置的侧视图;
[0028]
其中:1、发光板,2、发光板支架,3、第一螺栓,4、机械手本体,5、螺母,6、第二螺栓,7、固定扣,8、风管,9、连接软管,10、电磁阀,11、电器线路,12、双通吸嘴,13、单通吸嘴,14、吸盘,15、t型吸杆,16、单通吸杆。
具体实施方式
[0029]
下面结合实施例对本实用新型做进一步详细说明。
[0030]
本实用新型公开了一种塑料提手生产线用吸盘机械手,参见图1-图9,包括发光板1、发光板支架2、第一螺栓3、机械手本体4、螺母5、第二螺栓6、固定扣7、风管8、连接软管9、电磁阀10、电气线路11、双通吸嘴12、单通吸嘴13,其中:
[0031]
机械手本体4上设置通孔,可使用该通孔将机械手本体4与生产设备连接;机械手
本体4上沿着机械手本体4长度方向平行设置两列通孔,两列通孔分别用于安装单通吸嘴13和双通吸嘴12;机械手本体4的上部和下部设置螺纹孔,相应的螺纹孔用于安装发光板1和风管8,发光板1和风管8分别位于机械手本体4的两侧,参见图4;风管8上连接有多个连接软管9;机械手本体4上设置一列螺纹孔,该螺纹孔用于安装多个电磁阀10,所有电磁阀10通过电气线路11与控制设备连接;一个电磁阀10、一个连接软管9、一个单通吸嘴13、一个双通吸嘴12为一组吸附装置,每个电磁阀10用于单独控制相应组的单通吸嘴13和双通吸嘴12的通断,一个单通吸嘴13和一个双通吸嘴12用以吸住一个提手。
[0032]
每组吸附装置中,单通吸嘴13的一个吸气口通过连接软管9与双通吸嘴12的一个吸气口连接,双通吸嘴12的另一个吸气口通过连接软管9与电磁阀10的进气口连接,电磁阀10的出气口使用连接软管9与风管8连接。
[0033]
发光板1上也具有两列通孔,两列通孔与单通吸嘴13和双通吸嘴12对应间隙配合。
[0034]
发光板1设置在机械手本体4外侧,发光板1通过发光板支架2(第一螺栓3)安装在机械手本体4上、并为视觉图像采集器提供光源。
[0035]
发光板1尺寸小于机械手本体4,发光板1为荧光导光板。发光板1和发光板支架2焊接连接。
[0036]
单通吸嘴13包括真空吸盘14和单通吸杆16,真空吸盘14和单通吸杆16为过盈配合,单通吸杆16设置在机械手本体4上,单通吸杆16上有螺纹,单通吸嘴13使用螺母5固定在机械手本体4上,真空吸盘14与发光板1上的一列通孔间隙配合。
[0037]
双通吸嘴12包括真空吸盘14和t型吸杆15,真空吸盘14和t型吸杆15为过盈配合,t型吸杆15上有螺纹,t型吸杆15使用螺母5固定在机械手本体4上,t型吸杆15设置在机械手本体4上,真空吸盘14与发光板1上的另一列通孔间隙配合。
[0038]
风管8通过上下两个固定扣7使用第二螺栓6固定在机械手本体4上。固定扣7为ω型。
[0039]
下面举例详细说明。
[0040]
如图1所示,塑料提手生产线用吸盘机械手用发光板1,为采集清晰的提手图像提供光源。发光板1上具有两列通孔,其中一列通孔与单通吸嘴13间隙配合,另一列通孔与双通吸嘴12间隙配合。
[0041]
如图2所示,发光板1和机械手本体4通过发光板支架2连接。其中,发光板1和发光板支架2通过焊接固定在一起,发光板支架2通过第一螺栓3和机械手本体4固定。
[0042]
如图3、图4所示,吸盘机械手装置包括机械手本体4、螺母5、第二螺栓6、固定扣7、风管8、连接软管9、电磁阀10、电器线路11。
[0043]
其中机械手本体4上与发光板1对应处也设置两列通孔,一列用于安装单通吸嘴13,另一列安装双通吸嘴12,单通吸嘴13、双通吸嘴12和机械手本体4通过螺母5连接。机械手本体4上部和下部设置螺纹孔,用于安装发光板1和风管8,机械手本体4上还设置一列螺纹孔,用于安装电磁阀10。
[0044]
单通吸嘴13的一个吸气口通过连接软管9与双通吸嘴12的一个吸气口连接,双通吸嘴12的另一个吸气口通过连接软管9与电磁阀10的进气口连接,一个单通吸嘴13和一个双通吸嘴12可以吸住一个提手。
[0045]
电磁阀10上具有螺纹,直接安装在机械手本体4上,电磁阀10的进气口使用连接软
管9与双通吸嘴12连接,出气口使用连接软管9与风管8连接,电磁阀10通过电气线路11与其他控制设备连接。
[0046]
风管8通过两个固定扣7使用第二螺栓6固定在机械手本体4上。
[0047]
轴侧图如图5所示。
[0048]
如图6、图7所示,双通吸嘴12包括真空吸盘14和t型吸杆15,真空吸盘14和t型吸杆15为过盈配合。
[0049]
如图8、图9所示单通吸嘴13包括真空吸盘14和单通吸杆16,真空吸盘14和单通吸杆16为过盈配合。
[0050]
本实用新型的工作过程如下:
[0051]
当塑料提手通过相关生产设备生产完成后,机械手本体4在电气控制系统的作用下靠近提手,通过电磁阀10吸气,单通吸嘴13和双通吸嘴12将提手真空吸起,机械手本体4后退到固定位置,通过发光板1提供光源,视觉图像采集器进行图像采集,采集完成后,机械手本体4翻转平移到下一工位,通过图像处理结果,电磁阀10控制单通吸嘴13和双通吸嘴12分别将合格品和不良品放置到对应位置。
[0052]
本实用新型具体用到的装置型号如下:
[0053]
机械手本体4的长度为1500mm,宽度为500mm,高度为20mm。
[0054]
发光板1的长度为1400mm,宽度为480mm,高度为5mm。
[0055]
单通吸嘴13和双通吸嘴12的直径为20mm,高度为50mm。
[0056]
真空吸盘14为硅胶材质。
[0057]
单通吸杆16和t型吸杆15为硬质塑料或金属材质。
[0058]
风管8的长度为2000mm,直径为10mm,风管8为硬质塑料或金属材质。
[0059]
连接软管9的长度为50mm,直径为8mm;连接软管9为硅胶材质。
[0060]
电磁阀10的型号为chnt n2v025-08二位二通电磁阀。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1