一种机器人衔接臂转换装置的制作方法
1.本实用新型涉及一种机器人衔接臂转换装置。
背景技术:
2.随着人工智能技术的发展,传统的生产线及车间亟待进行技术更新与现代化改造,在全面推动机器人换人的情况下,各种各样的技术岗位、工艺过程被机器人替代。机器人衔接臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性, 已在工业装配, 安全防爆等领域得到广泛应用。机器人衔接臂用于流水线上时,需要进行工具交换、夹具交换、器具装夹和金属加工件放置和固定,这些工具、夹具、金属加工件等需要机械臂夹持的零件需要放置在合适的工作面上,否则这些零件容易出现散落及移动现象,影响机器人衔接臂的工作效率。
技术实现要素:
3.本实用新型的目的是为了解决上述问题,提供一种能够协助机器人衔接臂进行工具交换、固定金属加工件等操作的转换装置。
4.为此,本实用新型的技术方案是:一种机器人衔接臂转换装置,其特征在于:包括倒v型支架和平面导板,平面导板置于倒v型支架上方;所述平面导板由磁性材料制成,上表面设有多条平行设置的装配槽,装配槽的径向截面为倒t型。
5.优选地,所述装配槽内设有橡胶内衬。
6.优选地,所述倒v型支架由两个带有倒v开口的面板组成,两面板均开口朝下,开口顶端为圆弧结构,两面板通过两侧的弧形面连接为一体,平面导板安装在两面板顶部。
7.优选地,所述倒v型支架的两侧的弧形面向面板底部延伸出底部支撑面,底部支撑面与弧形面通过圆弧过渡连接。
8.本实用新型的平面导板是承接机器人的工装、夹具及加工对象的固定接触主体、承接及受力面,平面导板采用磁性铝合金制成,具有良好的吸附性,可以防止金属加工件散落及移动,并与倒v型支架的支撑座进行铆合链接和契合;倒v型支架的内侧采用圆弧过渡连接,使得支架内侧呈拱形结构,保证了抗压,避免受到左右摆动带来的谐振力影响,整体放置得更加稳固。平面导板上表面设置的装配槽主要用于固定螺钉,倒t型结构的装配槽上端为开口,便于加工件的铆合及固定,螺钉尺寸有一定拓展范围,因此装配槽的内衬材料选用耐磨不易破损的橡胶材质,按照定制尺寸进行设计、加工与综合测试。
9.本实用新型采用带磁性的平面导板来对放置在表面的物体(铁及合金材质)产生吸附力,协助机器人衔接臂进行工具交换、夹具交换、器具装夹、金属加工件放置及固定等操作,保证机器人衔接臂提高工作效率。
附图说明
10.以下结合附图和本实用新型的实施方式来作进一步详细说明
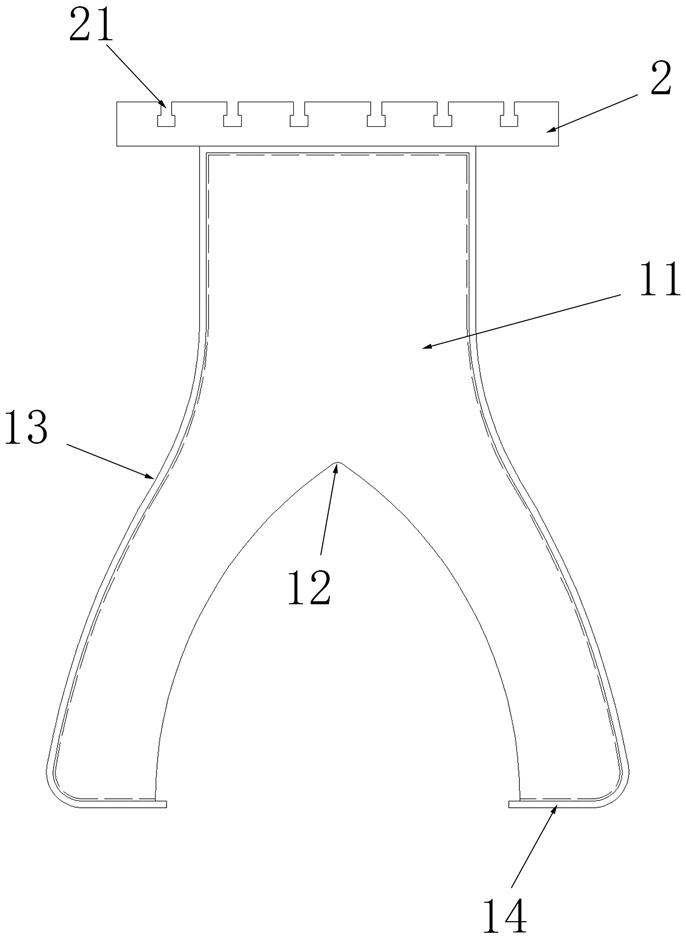
11.图1为本实用新型的结构正视图;
12.图2为本实用新型的结构俯视图;
13.图3为本实用新型的结构示意图。
14.图中标记为:v型支架1、面板11、圆弧结构12、弧形面13、底部支撑面14、平面导板2、装配槽21。
具体实施方式
15.参见附图。本实施例所述的转换装置,包括倒v型支架1和平面导板2,倒v型支架1是整个重量的支撑主体,通常选取碳合金钢,并进行必要的淬火和热处理,使得倒v型支架不变形且具有的耐用性。
16.倒v型支架1由两个带有倒v开口的面板11组成,两面板均开口朝下,开口顶端为圆弧结构12,使得倒v型支架内侧为拱形结构,增强了抗压性;两面板通过左右两侧的弧形面13连接为一体,平面导板安装在两面板顶部。所述倒v型支架的两侧的弧形面13向面板底部延伸出底部支撑面14,底部支撑面与弧形面通过圆弧过渡连接。底部支撑面采用塑性合金铸造,具有高承载力,与地面接触紧密性高,并可防止刮花地面材料和地板等。
17.平面导板2是于承接机器人的工装、夹具及加工对象的固定接触主体和承接及受力面,平面导板采用磁性铝合金加工制造而成,具有磁性导通开关功能,当金属类物件放置在平面导板2上后,可以实现磁性吸合,固定效果较好,防止金属加工件散落及移动,在符合装配槽及滑块移动的情况下,磁性材料可以使得金属加工件在受力及拖拽时具有较强的韧性,平面导板与倒v型支架进行铆合链接、契合。平台承载面具有磨砂平整特性,可以实现钢化玻璃易碎、易爆材质的物品固定,也可以完成不锈钢、铜、铁、钴镍等稀有金属铸件、半成品的固定与加工。
18.平面导板2上表面设有多条平行设置的装配槽21,便于螺钉的固定,而装配槽的径向截面为倒t型,装配槽的开口朝上,更加便于加工件的铆合及固定;装配槽内设有橡胶内衬,使其适合更多尺寸的螺钉,适用范围更广。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1