一种夹爪机构及变速箱壳体手爪的制作方法
1.本实用新型属于机械辅助工具技术领域,具体涉及一种夹爪机构及变速箱壳体手爪。
背景技术:
2.手爪是指机械制造过程中用来固定加工对象,使之占有正确的位置,以接受施工或检测的装置。变速箱壳体加工时需要能够将变速箱壳体固定良好便于加工的手爪,在汽车变速箱加工、装配、周转过程中,需要频繁对变速箱壳体进行移位、翻转等。
3.现有技术中的变速箱壳体手爪包括夹爪、定位板和稳定杆,定位板用于对变速箱壳体的定位,稳定杆用于在变速箱壳体进行移位、翻转等工序时保证整体的稳定性,在对变速箱壳体抓夹过程中仅是将夹爪穿过变速箱连接孔,并手动装卡以实现与定位板的固定,之后再将定位板固定在机床上,再对变速箱壳体进行加工;当一个工序加工完成后,拆下定位板,再将定位板固定在下一个机床上,整个工序的固定方式较为落后,使得加工效率低下,给企业的生产带来不便。同时,变速箱壳体相对于其他零部件,形状复杂、体积大、质量重,目前人工吊装效率低、劳动强度大、存在安全风险。
技术实现要素:
4.针对上述问题,本实用新型的目的是提供一种夹爪机构及变速箱壳体手爪,通过对部件结构的合理设置,整体实现对变速箱壳体的高效抓取、精确定位、降低劳动强度、降低安全风险以及自动化程度高,同时在对变速箱壳体进行移位、翻转等工序时保证整体的稳定性。
5.为实现上述目的,本实用新型采取的技术方案包括:
6.一种夹爪机构,包括第二安装板和三个垂直穿过第二安装板的导向杆,各导向杆间的距离相同且导向杆下端部水平设有卡爪;还包括设在第二安装板下方的安装座,安装座整体为柱形腔体结构,安装座内设有旋转组件,安装座下方周向设有固定环,导向杆自上而下依次穿过第二安装板和安装座,卡爪与固定环间配合留有固定变速箱壳体的空间。
7.优选的,旋转组件包括导向杆中部侧壁周向设置的螺旋槽,螺旋槽中活动设有限位块;旋转组件还包括安装座侧壁设置的限位槽,限位块卡设在限位槽内。
8.优选的,安装座下端面设有固定板,导向杆位于第二安装板和固定板的部分分别套设第一稳定环和第二稳定环。
9.优选的,还包括位于第二安装板上方的连接板,导向杆上端部周向均匀设在连接板下方;连接板和导向杆间还设有浮动接头。
10.一种变速箱壳体手爪,包括动力机构和动力机构下方的夹爪机构,夹爪机构为本实用新型公开的夹爪机构。
11.优选的,动力机构包括第一安装板和设在第一安装板上方的伸缩气缸,伸缩气缸下方的活塞杆自上而下穿过第一安装板、并连接夹爪机构上端。
12.优选的,还包括设在第二安装板下方的定位机构,定位机构包括第一定位组件和第二定位组件,第一定位组件和第二定位组件分别位于安装座两侧。
13.优选的,第一定位组件包括设在第二安装板下方的三爪定心气缸,三爪定心气缸下方周向均匀设有定心手指,定心手指外侧设有手指贴片;第二定位组件和第一定位组件的结构一致。
14.优选的,还包括设在第二安装板下方的稳定杆。
15.优选的,还包括设在第二安装板下方的视觉机构,视觉机构包括相机和环形光源。
16.与现有技术相比,本实用新型的优点为:
17.(1)本实用新型的夹爪机构,通过对部件结构的合理设置,导向杆在垂直方向直线运动的同时旋转运动,带动卡爪张开或收拢;同时安装座以及其下方的固定环和卡爪配合留有固定变速箱壳体的空间,当卡爪张开时用于实现变速箱壳体的抓夹,整体实现对变速箱壳体高效抓取、降低劳动强度以及降低安全风险。
18.(2)本实用新型的夹爪机构及变速箱壳体手爪,通过对部件结构的合理设置,动力机构为夹爪机构提供动力,带动三个导向杆3轴向往复运动,同时带动卡爪张开或收拢,实现变速箱壳体的抓夹,手爪整体实现对变速箱壳体高效抓取、降低劳动强度以及降低安全风险。
19.(3)本实用新型的夹爪机构及变速箱壳体手爪,通过对部件结构的合理设置,导向杆在直线运动和旋转运动时保持稳定和流畅,导向杆轴向直线运动受力均衡,提高手爪对变速箱壳体抓取的稳定性,同时在对变速箱壳体进行移位、翻转等工序时保证整体的稳定性。
20.(4)本实用新型的变速箱壳体手爪,通过对部件结构的合理设置,定位机构对实现变速箱壳体的精确定位,确保手爪对变速箱壳体高效抓取。
21.(5)本实用新型的一种变速箱壳体手爪,通过对部件结构的合理设置,提高变速箱壳体定位识别准确率,扩展变速箱壳体手爪应用的广泛性,同时在现有系统和软件的配合下,实现变速箱壳体手爪自动化。
附图说明
22.附图是用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本实用新型,但并不构成对本实用新型的限制。在附图中:
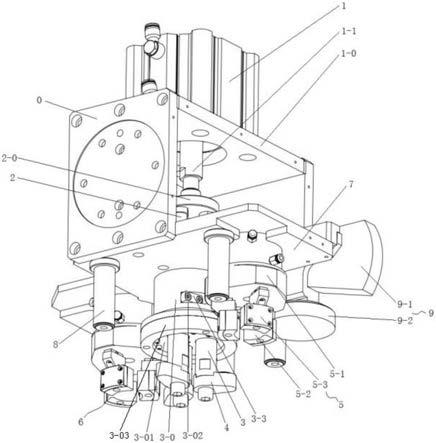
23.图1为本实用新型的变速箱壳体手爪的结构示意图;
24.图2为图1中连接板、浮动接头、导向杆、卡爪和限位块的结构示意图;
25.图3为图1中第一定位组件的仰视图;
26.图4为图1的仰视图;(其中,图4a为卡爪闭合时的使用状态图;图4b为卡爪张开时的使用状态图)
27.图中各标号表示为:
28.0法兰连接板;1伸缩气缸;1
‑
1活塞杆;1
‑
0第一安装板;2浮动接头;2
‑
0连接板;3导向杆;3
‑
1第一稳定环;3
‑
2第二稳定环;3
‑
3螺旋槽;3
‑
4限位块;3
‑
0安装座;3
‑
01固定板;3
‑
02限位槽;3
‑
03固定环;4卡爪;5第一定位组件;5
‑
1三爪定心气缸;5
‑
2定心手指;5
‑
3手指贴片;6第二定位组件;7第二安装板;8稳定杆;9视觉机构;9
‑
1相机;9
‑
2环形光源。
为连接板2
‑
0及其下方的导向杆3提供垂直往复的动力;夹爪机构上端的连接板2
‑
0用于连接动力机构和三个导向杆3。
44.其中,伸缩气缸1为现有设备,具体可优选acq系列标准气缸。
45.具体的,还包括设在第二安装板7下方的定位机构,定位机构包括第一定位组件5和第二定位组件6,第一定位组件5和第二定位组件6分别位于安装座3
‑
0两侧;其作用为:定位机构通过第一定位组件5和第二定位组件6共同实现变速箱壳体的精确定位。
46.具体的,第一定位组件5包括设在第二安装板7下方的三爪定心气缸5
‑
1,三爪定心气缸5
‑
1下方周向均匀设有定心手指5
‑
2,定心手指5
‑
2外侧设有手指贴片5
‑
3;第二定位组件6和第一定位组件5的结构一致。
47.其中,三爪定心气缸5
‑
1为现有设备,具体可优选hfcq系列标准三爪气缸;手指贴片5
‑
3采用铜制,避免挤压和划伤变速箱壳体定位孔。
48.具体的,还包括设在第二安装板7下方的稳定杆8;其作用为:稳定杆8使得手爪在对变速箱壳体进行移位、翻转等工序时保证整体的稳定性。
49.其中,稳定杆8的数量和位置根据所夹持的变速箱壳体形状可调整。
50.具体的,还包括设在第二安装板7下方的视觉机构9,视觉机构9包括相机9
‑
1和环形光源9
‑
2;其作用为:通过相机9
‑
1和环形光源9
‑
2的配合极大地提高变速箱壳体定位识别准确率,扩展变速箱壳体手爪应用的广泛性;同时在现有系统和软件的配合下,实现变速箱壳体手爪自动化。
51.具体的,还包括垂直设在第一安装板1
‑
0两侧且连接第二安装板7的法兰连接板0;其作用为:法兰连接板0用于将手爪整体连接并在关节机器人第六轴末端法兰盘端面,与机器人形成完整连接。
52.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
53.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
54.此外,本发公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所发明的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1