一种用于超特高压变电站轨道式带电作业机器人的制作方法
1.本实用新型涉及一种机器人,更确切的说是一种用于超特高压变电站轨道式带电作业机器人。
背景技术:
2.公开(公告)号:cn205373774u公开了一种轨道式变电站巡检机器人,我们在应用中发现在这种机器人导轨的周围随着树木的不断生长,部分树枝会伸展到导轨的附近,在巡检机器人经过时,这些树枝有时会插入到悬杆、辊轮与导轨的间隙内部,导致机器人本体(3)无法行进,进而被卡在导轨上。影响机器人的正常使用。
技术实现要素:
3.本实用新型的目的是提供一种用于超特高压变电站轨道式带电作业机器人,能够在机器人本体的前部增加了树枝防护装置,树枝防护装置能够挡在辊轮和悬杆的前方,当机器人本体行进的过程中,树枝防护装置能够对靠近辊轮和悬杆的树枝起到一定的阻挡作用,从而避免树枝轻易插入到辊轮、悬杆和导轨之间的间隙内部,有效避免树枝影响机器人本体的行进。
4.本实用新型为实现上述目的,通过以下技术方案实现:
5.一种用于超特高压变电站轨道式带电作业机器人,包括机器人本体,机器人本体的上部连接悬杆,悬杆的上部安装辊轮,辊轮与导轨配合,机器人本体能够通过辊轮在导轨上行走,所述机器人本体的前部安装树枝防护装置,所述树枝防护装置包括支架,支架的一侧与机器人本体的外侧连接,支架的另一侧连接u形板,u形板为一侧开口的方形框状结构,u形板的一侧连接第二连接带,第二连接带的一侧连接定位板,定位板与u形板配合能够构成方形框状结构,定位板与u形板配合能够套在导轨上,定位板的一侧与u形板的一侧之间连接锁定装置,锁定装置能够将u形板和定位板锁定,u形板的外侧连接三个导向板,定位板的外侧连接一个导向板。
6.为了进一步实现本实用新型的目的,还可以采用以下技术方案:所述u形板的内侧连接三个毛刷,定位板的一侧连接一个毛刷,u形板和定位板上的四个毛刷能够分别贴合导轨的上下左右四个面。
7.所述三个导向板之间连接柔性塑料板,柔性塑料板的两侧分别与两侧的导向板连接。
8.所述机器人本体的底部连接步进电机,步进电机的输出轴连接摆臂,摆臂的一端连接安装座,安装座的一侧连接无线摄像头。
9.所述机器人本体的前部连接辅助防护装置,所述辅助防护装置包括探出板,探出板的一侧与机器人本体的前部连接,探出板的另一侧连接弹簧,弹簧的一端连接有机玻璃板,有机玻璃板能够挡在无线摄像头的前方。
10.所述锁定装置包括第一连接带,第一连接带的一侧与u形板的一侧连接,第一连接
带的另一侧连接固定板,固定板的一侧连接毛面粘扣,定位板的一侧连接钩面粘扣,钩面粘扣能够与毛面粘扣配合。
11.本实用新型的优点在于:本实用新型在机器人本体的前部增加了树枝防护装置,树枝防护装置能够挡在辊轮和悬杆的前方,当机器人本体行进的过程中,树枝防护装置能够对靠近辊轮和悬杆的树枝起到一定的阻挡作用,从而避免树枝轻易插入到辊轮、悬杆和导轨之间的间隙内部,有效避免树枝影响机器人本体的行进。
附图说明
12.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
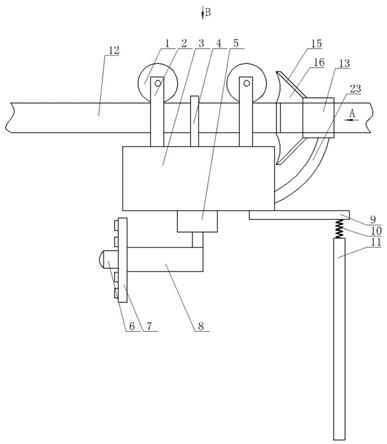
13.图1为本实用新型的结构示意图;
14.图2为图1的a向放大结构示意图;
15.图3为图1的b向放大结构示意图;
16.图4为有机玻璃板受到树枝阻挡后产生旋转的结构示意图。
17.标注部件:1辊轮 2悬杆 3机器人本体 4套环 5步进电机 6无线摄像头 7安装座 8摆臂 9探出板 10弹簧 11有机玻璃板 12导轨 13u形板 14毛刷 15导向板 16柔性塑料板 17第一连接带 18钩面粘扣 19毛面粘扣 20固定板 21定位板 22第二连接带 23支架。
具体实施方式
18.以下结合附图对本实用新型的优选实施例进行说明。
19.一种用于超特高压变电站轨道式带电作业机器人,如图1
‑
图4所示,包括机器人本体3,机器人本体3的上部连接悬杆2,悬杆2的上部安装辊轮1,辊轮1与导轨 12配合,机器人本体3能够通过辊轮1在导轨12上行走,其特征在于:所述机器人本体3的前部安装树枝防护装置,所述树枝防护装置包括支架23,支架23的一侧与机器人本体3的外侧连接,支架23的另一侧连接u形板13,u形板13为一侧开口的方形框状结构,u形板13的一侧连接第二连接带22,第二连接带22的一侧连接定位板21,定位板21与u形板13配合能够构成方形框状结构,定位板21与u形板13 配合能够套在导轨12上,定位板21的一侧与u形板13的一侧之间连接锁定装置,锁定装置能够将u形板13和定位板21锁定,u形板13的外侧连接三个导向板15,定位板21的外侧连接一个导向板15。
20.本实用新型在机器人本体3的前部增加了树枝防护装置,树枝防护装置能够挡在辊轮1和悬杆2的前方,当机器人本体3行进的过程中,树枝防护装置能够对靠近辊轮1和悬杆2的树枝起到一定的阻挡作用,从而避免树枝轻易插入到辊轮1、悬杆2 和导轨12之间的间隙内部,有效避免树枝影响机器人本体3的行进。
21.上述结构为本技术的必要技术特征。
22.适用范围、具体实施的选材和可行性分析:我们实际制作的样品以说明书附图作为图纸,按照说明书附图中各个部件的比例和配合方式实施,所述的连接为强力胶黏剂连接、焊接、23铆接、法兰连接、一体成型式连接等常用的连接方式,实际制作时可以根据实际连接强度需要无需创造性的选择对应的连接方式、连接点的厚度和强度。本实用新型的支架23可以采用万向管,从而能够方便树枝防护装置安装到导轨 12上,在树枝防护装置安装
到导轨12上时,使用者可以先将锁定装置打开,然后让 u形板13套在导轨12上,然后旋转定位板21,使定位板21与u形板13配合套在导轨12上,然后使用锁定装置将导轨12和定位板21锁定,从而使导向板15挡在辊轮 1和悬杆2的前方,从而在一定程度上防止树枝插入到辊轮1、悬杆2和导轨12的间隙内部。导轨12和定位板21套在导轨12上后,与导轨12之间存在间隙,从而有利于树枝防护装置在导轨12上滑动。同时,树枝防护装置能够在辊轮1与导轨12脱离时使机器人本体3与导轨12保持连接,从而避免导轨12坠落。
23.以下技术内容为本技术的非必要技术特征:
24.所述u形板13的内侧连接三个毛刷14,定位板21的一侧连接一个毛刷14,u 形板13和定位板21上的四个毛刷14能够分别贴合导轨12的上下左右四个面。
25.本实用新型的毛刷14一方面能够填补u形板13、定位板21与导轨12的间隙,避免竖直插入到u形板13、定位板21与导轨12的间隙中,同时毛刷14与导轨12 的表面接触相对于u形板13直接与导轨12接触,摩擦力更小,能够更加方便导轨12 与定位板21形成的包围结构在导轨12上滑动。本实用新型的毛刷14同时能够通过刷动导轨12的表面,从而对导轨12起到一定的清理作用,从而使机器人本体3能够更加方便地在导轨12上滑动。
26.所述三个导向板15之间连接柔性塑料板16,柔性塑料板16的两侧分别与两侧的导向板15连接。
27.本实用新型的柔性塑料板16能够填补相邻导向板15之间的间隙,从而对辊轮1 和悬杆2起到更好的防护作用。
28.所述机器人本体3的底部连接步进电机5,步进电机5的输出轴连接摆臂8,摆臂8的一端连接安装座7,安装座7的一侧连接无线摄像头6。
29.本实用新型的步进电机5具有对应的遥控装置、电源和控制器,使用者可以通过遥控装置和控制器控制步进电机5的旋转,步进电机5能够通过带动摆臂8转动从而带动无线摄像头6旋转拍摄。
30.所述机器人本体3的前部连接辅助防护装置,所述辅助防护装置包括探出板9,探出板9的一侧与机器人本体3的前部连接,探出板9的另一侧连接弹簧10,弹簧 10的一端连接有机玻璃板11,有机玻璃板11能够挡在无线摄像头6的前方。
31.本实用新型的辅助防护装置能够在树枝阻挡在无线摄像头6行进路径上时,优先与树枝接触,从而在无线摄像头6的前部倾城一个倾斜的斜面,从而避免树枝刮到无线摄像头6,从而保护无线摄像头6不受损伤。有机玻璃板11为透明有机玻璃板,能够避免阻挡无线摄像头6的拍摄。本实用新型的弹簧10能够在有机玻璃板11受到树枝的阻挡后使有机玻璃板11形成一个斜面,从而引导树枝在不碰撞无线摄像头6的情况下方便机器人本体3的通过。
32.所述锁定装置包括第一连接带17,第一连接带17的一侧与u形板13的一侧连接,第一连接带17的另一侧连接固定板20,固定板20的一侧连接毛面粘扣19,定位板 21的一侧连接钩面粘扣18,钩面粘扣18能够与毛面粘扣19配合。
33.本实用新型的锁定装置能够通过钩面粘扣18和毛面粘扣19的配合时定位板21 和u形板13锁定,从而使定位板21和u形板13形成一个包围结构套在导轨12上,钩面粘扣18和毛面粘扣19结合也嫩巩固方便固定板20与定位板21脱离,从而方便定位板21解锁。
34.每行驶500米现有技术与本技术受到树枝阻挡无法行进次数统计表:
[0035][0036][0037]
以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1