一种双臂移动机器人的制作方法
1.本实用新型属于机器人领域,具体是一种双臂移动机器人。
背景技术:
2.移动机器人技术是机器人技术的一个重要分支,是研究应用人工智能技术在复杂环境下自主推理、规划和控制的技术。双臂轮式移动机器人是集智能感知识别、大数据、人工智能等技术于一身的产品,具有不同自由度的差异机械臂具有更加灵活的手臂操作空间,兼具移动性和可操作性的特点,环境适应性强,在面临复杂的工作环境下,以较高的速度及精度执行任务,可以用来执行传统移动机器人无法完成的工作。
技术实现要素:
3.本实用新型的目的在于提供一种双臂移动机器人,以解决上述背景技术中提出的问题。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种双臂移动机器人,包括头壳、手臂壳、身体上壳、身体下壳、激光雷达、电源开关、头部旋转电机、第一立柱、底盘、电气箱、底板、摄像头固定板、手臂电机、第一腕关节和手连接盘,所述头壳的顶端设置有麦克风,头壳内部设置有头部,头部的上方设置有头部旋转电机,头部旋转电机上安装有头壳固定件,头壳固定于头部的头壳固定件上;所述头壳内部的下方连接有肩板,肩板上安装有摄像头固定板,头壳外部的下方连接有身体上壳,身体上壳的右侧安装有右臂,右臂设置为七自由度手臂,右臂的最左端设置有手臂固定件,右臂通过手臂固定件与身体上壳相连,手臂固定件的下方安装有手臂电机,手臂固定件的右侧连接有手臂壳,手臂壳固定于手臂上,能随着电机运动,手臂壳的右侧连接有肩关节,肩关节的右侧连接有大臂,大臂的右侧连接有肘关节,肘关节的右侧连接有小臂,小臂的右侧连接有第一腕关节,第一腕关节的右侧连接有第二腕关节,第二腕关节的右侧设置有手连接盘,身体上壳的左侧安装有左臂,左臂的最左侧安装有手臂固定件,手臂固定件上安装有手臂电机,手臂电机的右侧连接有肩关节,身体上壳外侧的正面安装有摄像头,身体上壳外侧的后面安装有电源开关,身体上壳内部的上方设置有躯干,躯干的周围设置有第一立柱,第一立柱的上端连接有肩板,第一立柱远离肩板的一端连接有腰板,肩板与腰板通过第一立柱固定连接,腰板的下方设置有第二立柱,腰板和第二立柱的两侧均固定连接有把手固定板,把手固定板用于安装把手;所述身体上壳的下方连接有身体下壳,身体下壳外侧正面的下方设置有激光雷达槽,激光雷达槽中设置有激光雷达,激光雷达上方的右侧设置有喇叭,身体下壳外侧的后面设置有数据及充电接口,身体上壳和身体下壳均分为两部分,用螺钉连接组装而成;所述第二立柱远离腰板的一端连接有底盘,底盘的中部安装有激光雷达,底盘内部的上方安装有下腰板,下腰板和腰板通过第二立柱相连,第二立柱远离下腰板的一端连接有底板,下腰板的下方设置有电气箱;所述底板的后部设置有两个万向轮,底板前部的左右两侧均安装有驱动轮,底板中部安装有电池;所述头壳、手臂壳、身体上壳和身体下
壳均由非金属材质构成。
6.作为本实用新型的进一步方案:所述头壳上安装有显示屏。
7.作为本实用新型的进一步方案:所述头部旋转电机的下方连接有头部支撑。
8.作为本实用新型的进一步方案:所述电源开关的下方安装有急停开关。
9.作为本实用新型的再进一步方案:所述底板的上方安装有散热风扇。
10.与现有技术相比,本实用新型设置有摄像头、激光雷达和驱动轮,具有自主避障、自主导航和运动规划功能,有良好的结构刚度,承载能力强;设置有左臂和右臂,具有差异自由度的两只手臂末端具有良好的手臂操作空间,更高的灵活性,双臂可实现协作工作,整机控制精度高,环境适应性强,具有优良的运动稳定性、灵活性、可操作性、能量利用率高,能够应用于科研,教学与服务机器人行业等。
附图说明
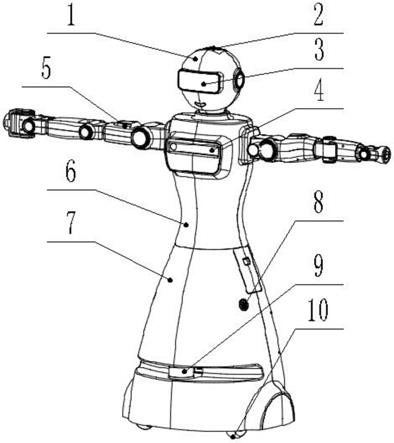
11.图1为一种双臂移动机器人整机正视的结构示意图。
12.图2为一种双臂移动机器人后视的结构示意图。
13.图3为一种双臂移动机器人的身体结构示意图。
14.图4为一种双臂移动机器人底板的结构示意图。
15.图5为一种双臂移动机器人躯干的结构示意图。
16.图6为一种双臂移动机器人右臂七自由度的结构示意图。
17.图7为一种双臂移动机器人左臂六自由度的结构示意图。
18.图中:1、头壳;2、麦克风;3、显示屏;4、摄像头;5、手臂壳;6、身体上壳;7、身体下壳;8、喇叭;9、激光雷达;10、驱动轮;11、电源开关;12、急停开关;13、数据及充电接口;14、头部旋转电机;15、头部;16、肩板;17、右臂;18、第一立柱;19、腰板;20、躯干;21、底盘;22、手臂结构件;23、左臂;24、下腰板;25、电气箱;26、散热风扇;27、底板;28、电池;29、万向轮;30、头壳固定件;31、头部支撑;32、摄像头固定板;33、小臂;34、大臂;35、手臂固定件;36、手臂电机;37、肩关节;38、肘关节;39、第一腕关节;40、第二腕关节;41、手连接盘;42、第三腕关节;43、把手固定板;44、第二立柱。
具体实施方式
19.下面结合具体实施方式对本专利的技术方案作进一步详细地说明。
20.请参阅图1-7,一种双臂移动机器人,包括头壳1、手臂壳5、身体上壳6、身体下壳7、激光雷达9、电源开关11、头部旋转电机14、第一立柱18、底盘21、电气箱25、底板27、摄像头固定板32、手臂电机36、第一腕关节39和手连接盘41;所述头壳1的顶端设置有麦克风2,头壳1上安装有显示屏3,头壳1内部设置有头部15,头部15的上方设置有头部旋转电机14,头部旋转电机14的下方连接有头部支撑31,头部旋转电机14 上安装有头壳固定件30,头壳1固定于头部15的头壳固定件30上,由头部旋转电机14 驱动,具有一个水平转动自由度;所述头壳1内部的下方连接有肩板16,肩板16上安装有摄像头固定板32,头壳1外部的下方连接有身体上壳6,身体上壳6的右侧安装有右臂 17,右臂17设置为七自由度手臂,右臂17的最左端设置有手臂固定件35,右臂17通过手臂固定件35与身体上壳6相连,手臂固定件35的下方安装有手臂电机36,手臂固定件 35的右侧连接有手臂壳5,手臂壳5固定于手臂上,能
随着电机运动,手臂壳5的右侧连接有肩关节37,肩关节37的右侧连接有大臂34,大臂34的右侧连接有肘关节38,肘关节38的右侧连接有小臂33,小臂33的右侧连接有第一腕关节39,第一腕关节39的右侧连接有第二腕关节40,第二腕关节40的右侧设置有手连接盘41,身体上壳6的左侧安装有左臂23,左臂23的最左侧安装有手臂固定件35,手臂固定件35上安装有手臂电机36,手臂电机36的右侧连接有肩关节37,肩关节37的右侧连接有大臂34,大臂34的右侧连接有肘关节38,肘关节38的右侧连接有小臂33,小臂33的右侧连接有第三腕关节42,第三腕关节42的右侧连接有手连接盘41,底座和肩关节37的电机能实现肩膀的转动和摆动,大臂34电机实现小臂33的转动,肘关节38的电机实现小臂33的摆动,肘关节38的电机实现腕关节的转动,第一腕关节39和第二腕关节40的电机实现末端的两个垂直轴向的摆动,第三腕关节42的电机实现手爪的两个垂直轴向的摆动,身体上壳6外侧的正面安装有摄像头4,身体上壳6外侧的后面安装有电源开关11,电源开关11的下方安装有急停开关12,身体上壳6内部的上方设置有躯干20,躯干20的周围设置有第一立柱18,第一立柱18的上端连接有肩板16,第一立柱18远离肩板16的一端连接有腰板19,肩板16 与腰板19通过第一立柱18固定连接,腰板19的下方设置有第二立柱44,腰板19和第二立柱44的两侧均固定连接有把手固定板43,把手固定板43用于安装把手;所述身体上壳 6的下方连接有身体下壳7,身体下壳7外侧正面的下方设置有激光雷达槽,激光雷达槽中设置有激光雷达9,激光雷达9上方的右侧设置有喇叭8,身体下壳7外侧的后面设置有数据及充电接口13,身体上壳6和身体下壳7均分为两部分,用螺钉连接组装而成;所述第二立柱44远离腰板19的一端连接有底盘21,底盘21的中部安装有激光雷达9,底盘21内部的上方安装有下腰板24,下腰板24和腰板19通过第二立柱44相连,第二立柱 44远离下腰板24的一端连接有底板27,下腰板24的下方设置有电气箱25;所述底板27 的后部设置有两个万向轮29,底板27前部的左右两侧均安装有驱动轮10,左右两个驱动轮10设置存在一定的差速,底板27中部安装有电池28,底板27的上方安装有散热风扇 26;所述头壳1、手臂壳5、身体上壳6和身体下壳7均由非金属材质构成,身体上壳6 和身体下壳7分别固定在底盘21和躯干20的机械机构上,方便拆卸和安装,底盘21、手臂、躯干20和头部15组成机身,手臂壳5、身体上壳6和身体下壳7组成外壳,外壳和机身组成机器人。
21.本实用新型的工作原理是:机器人在运动过程中通过激光雷达9能辨别出前进道路上是否有障碍物,如果有机器人能自主躲避障碍物,还能通过设置激光雷达9实现自动导航的功能,通过控制左臂23和右臂17能协作工作,节省工作人员的时间,驱动轮10能进一步提高机器人的灵活性,能让机器人快速到达指定的位置帮助工作。
22.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
23.上面对本专利的较佳实施方式作了详细说明,但是本专利并不限于上述实施方式,在本领域的普通技术人员所具备的知识范围内,还可以在不脱离本专利宗旨的前提下作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1