一种人形机器人骨架的制作方法
1.本实用新型涉及智能机器人技术领域,具体是涉及一种人形机器人骨架。
背景技术:
2.人形机器人,又称仿人机器人。人形机器人是一种智能化机器人,其运动的实现是通过组合在人形机器人骨架上的多个关节驱动器实现多个自由度的运动。人形机器人广泛应用于社会生活的各个领域,例如,玩具机器人、服务机器人等。
3.申请号为201510775674.3的中国发明专利申请公开了一种机器人内骨架,该机器人内骨架的头部可转动设在颈部上,颈部设在上身上,胯关节可转动设置在上身的下端,每条腿的下端设有一只脚,胯关节的下部设有两个腿部凹槽,每个腿部凹槽内设有一个腿部轴向转动关节,每个腿部轴向转动关节内水平设有一个腿部摆动轴,每条腿的上端可转动设置在一个腿部摆动轴上,上身的上部两侧分别设有一个上身凹槽,每个上身凹槽内设有一个手臂转动关节,每只手臂的上部设有一个手臂摆动轴,每个手臂摆动轴与每个手臂转动关节之间通过一个连接件连接,每只手臂与上身的上部两侧之间留有间隙。现有技术中的人形机器人大多是通过驱动装置实现的对机器人头部进行驱动实现头部转动。而不能对机器人的头部中的眼睛进行驱动。
技术实现要素:
4.为克服上述现有技术中的缺陷与不足,本实用新型提供一种人形机器人骨架。该人形机器人骨架的机器人头部驱动机构在驱动机器人头部转动的同时能够驱动机器人头部上的眼睛随着机器人的头部的转动而转动。
5.为实现上述目的本实用新型的技术方案是,一种人形机器人骨架,包括固定安装在胸腔上部的头部结构,所述头部结构包括头部驱动装置、变速齿轮组,所述头部驱动装置的转动输出轴具有花键齿,所述花键齿固定插入在底板上的连接套一端并与所述连接套的内花键齿固定啮合,所述连接套的另一端具有第一输入齿轮,所述第一输入齿轮与所述变速齿轮组的第二齿轮啮合,所述变速齿轮组的第三齿轮与第四齿轮啮合;所述第四齿轮具有径向凸出部,在所述径向凸出部上转动的固定连接有眼部装置。
6.优选的是,所述头部驱动装置置于所述胸腔内且处于所述胸腔的顶板底部;所述顶板与所述底板固定连接。。
7.在上述任一方案中优选的是,所述第二齿轮通过第一连接轴与所述第三齿轮同轴连接;所述第一连接轴的一端固定插入在顶板的第一连接孔内,另一端悬空。
8.在上述任一方案中优选的是,所述第四齿轮通过第二连接轴与所述第一输入齿轮同轴连接。
9.在上述任一方案中优选的是,在所述底板的顶部可拆卸的固定安装有头盖骨。
10.在上述任一方案中优选的是,在所述眼部装置上固定扣接有半圆形结构的固定架。
11.在上述任一方案中优选的是,所述固定架处于所述头盖骨和所述底板之间。
12.在上述任一方案中优选的是,在所述固定架的外围固定安装有半圆形结构的透明护目围板。
13.在上述任一方案中优选的是,所述护目围板处于所述头盖骨和所述底板之间。
14.在上述任一方案中优选的是,所述头部驱动装置为舵机。
15.与现有技术相比本实用新型的优点在于:该人形机器人骨架的头部转动的同时能够实现头部上的眼睛随着机器人的头部的转动而转动并且实现二者的差速转动。
附图说明
16.图1为按照本实用新型的人形机器人骨架一优选实施例的立体结构示意图。
17.图2为按照本实用新型的人形机器人骨架图1所示实施例的主视结构示意图。
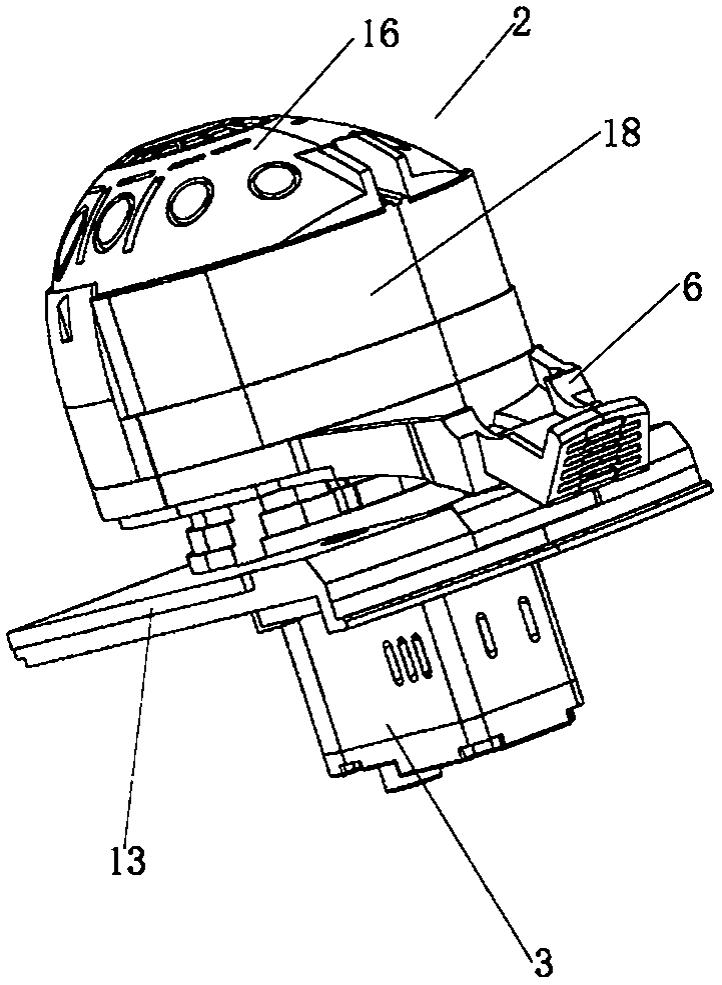
18.图3为按照本实用新型的人形机器人骨架图1所示实施例中头部结构的立体结构示意图。
19.图4为按照本实用新型的人形机器人骨架图3所示实施例的展开结构示意图。
20.图5为按照本实用新型的人形机器人骨架图3所示实施例中不带有头盖骨的头部结构示意图。
21.图6为按照本实用新型的人形机器人骨架图3所示实施例中安装有变速齿轮组的底板结构示意图。
具体实施方式
22.下面结合附图对本实用新型的优选实施例作进一步阐述说明;
23.在本实施例的描述中需要理解的是,术语“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量,由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
24.需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本实用新型中的具体含义。
25.实施例1:
26.如图1
‑
6所示,一种人形机器人骨架,在该骨架的外部可挂载外部机器人造型件。该人形机器人骨架,包括安装在胸腔1上部的头部结构2。图3为示出了该人形机器人骨架的头部结构的立体结构示意图。图4为图3的展开结构示意图。头部驱动装置3置于胸腔1内且处于胸腔1的顶板13底部。头部结构2,包括头部驱动装置3、变速齿轮组。所述变速齿轮组为加速齿轮组或减速齿轮组。在本实施例中,头部驱动装置3为舵机或电机。头部驱动装置3的转动输出轴4具有花键齿5。花键齿5固定插入在底板6上的连接套7一端并与连接套7的内花
键齿固定啮合。连接套7的另一端具有第一输入齿轮8。顶板13与底板6固定连接。转动输出轴4转动带动连接套7转动和底板6转动,继而带动整个头部结构2实现转动。
27.第一输入齿轮8与所述变速齿轮组的第二齿轮9啮合。所述变速齿轮组的第三齿轮10与第四齿轮11啮合。第四齿轮11具有径向凸出部12。在径向凸出部12上转动的固定连接有眼部装置13。第二齿轮9通过第一连接轴14与第三齿轮10同轴连接。第一连接轴14的一端固定插入在顶板13的第一连接孔内,另一端悬空。第四齿轮11通过第二连接轴15与第一输入齿轮8同轴连接。
28.在底板6的顶部可拆卸的固定安装有头盖骨16。在眼部装置13上固定扣接有半圆形结构的固定架17。固定架17处于头盖骨16和底板6之间。在固定架17的外围固定安装有半圆形结构的透明护目围板18。所述护目围板18处于头盖骨16和底板6之间。所述舵机通过控制器的控制实现转动输出轴4的转动,转动输出轴4通过连接套7转动带动底板6转动,继而带动整个头部结构2实现转动。由于连接套7的另一端具有第一输入齿轮8与本实施例中的所述变速齿轮组实现眼部装置13与头部结构2差速转动。
29.实施例2:
30.如图1
‑
6所示,一种人形机器入骨架,在该骨架的外部可挂载外部机器人造型件,在该人形机器人骨架的外部设置有多个用于连接机器人造型件的多个连接插口、插槽。机器人造型件通过多个插口和/或插槽实现安装在该人形机器人骨架上。图1示出了本实施例中人形机器人骨架的立体结构示意图。图2示出了该人形机器人骨架的主视结构示意图。该人形机器人骨架,包括安装在胸腔1上部的头部结构2,通过舵机可转动的安装在胸腔结构1上的左手臂19、右手臂20、左腿部21和右腿部22。左手臂19上通过连接架固定连接有多个舵机组合构成左手臂19的整体结构,同样右手臂20通过连接架固定连接有多个舵机组合构成右手臂20的整体结构。左腿部21和右腿部22分别通过舵机可转动地安装在胸腔结构1的下部。左腿部21通过连接架固定连接有多个舵机组合构成左腿部21的整体结构。右腿部22通过连接架固定连接有多个舵机组合构成右腿部22的整体结构。
31.头部驱动装置3置于胸腔1内且处于胸腔1的顶板13底部。头部结构2,包括头部驱动装置3、变速齿轮组。所述变速齿轮组为加速齿轮组或减速齿轮组。在本实施例中,头部驱动装置3为舵机,所述舵机通过线路电性连接有电源和控制器。通过所述控制器控制所述舵机的转动输出轴4转动。头部驱动装置3的转动输出轴4具有花键齿5。花键齿5固定插入在底板6上的连接套7一端并与连接套7的内花键齿固定啮合。连接套7的另一端具有第一输入齿轮8。顶板13与底板6固定连接。转动输出轴4转动带动连接套7转动和底板6转动,继而带动整个头部结构2实现转动。
32.第一输入齿轮8与所述变速齿轮组的第二齿轮9啮合。所述变速齿轮组的第三齿轮10与第四齿轮11啮合。第四齿轮11具有径向凸出部12。在径向凸出部12上转动的固定连接有眼部装置13。第二齿轮9通过第一连接轴14与第三齿轮10同轴连接。第一连接轴14的一端固定插入在顶板13的第一连接孔内,另一端悬空。第四齿轮11通过第二连接轴15与第一输入齿轮8同轴连接。
33.在底板6的顶部可拆卸的固定安装有头盖骨16。在眼部装置13上固定扣接有半圆形结构的固定架17。固定架17处于头盖骨16和底板6之间。在固定架17的外围固定安装有半圆形结构的透明护目围板18。所述护目围板18处于头盖骨16和底板6之间。所述舵机通过控
制器的控制实现转动输出轴4的转动,转动输出轴4通过带动连接套7转动带动底板6转动,继而带动整个头部结构2实现转动。由于连接套7的另一端具有第一输入齿轮8与本实施例中的所述变速齿轮组实现眼部装置13与头部结构2差速转动。
34.以上所述仅是本实用新型的优选实施例,并非对本实用新型作任何形式上的限制,凡是依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
35.阅读了本说明书后,本领域技术人员不难看出,本实用新型由现有技术的结合构成,这些构成实用新型的各部分的现有技术有些在此给予了详细描述,有些则出于说明书简明考虑并未事无巨细地赘述,但本领域技术人员阅读了说明书后便知所云。而且本领域技术人员也不难看出,为构成本实用新型而对这些现有技术的结合是饱含大量创造性劳动,是发明人多年理论分析和大量实验的结晶。本领域技术人员同样可以从说明书中看出,这里所披露的每个技术方案以及各个特征的任意组合都属于本实用新型的一部分。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1