一种可拆卸的机器人加长臂的制作方法
1.本实用新型涉及机器人领域,尤其涉及一种可拆卸的机器人加长臂。
背景技术:
2.随着社会的发展,工业的进步,传统的人工作业已近无法满足现代企业的生产需求,尤其在某些劳动密集型行业中,传统的人工作业在面对大强度、工作内容简单但重复次数多的劳动时,低下的生产效率制约了企业的发展。以工业机器人为代表的的自动化设备具备了明显的优势,持续工作时间长、生产效率高、次品率低的特点,助力现代企业飞速发展。
3.在目前主流技术研究中,机器人划分类别主要依据是根据机器人传动轴的数目,最常见也是技术相对最完善的工业机器人是四轴机器人和六轴机器人。但是在一些特定工作环境中,比如冲压生产线,其工作空间相对较小,不适用传统工业机器人的机械臂,如果针对空间狭小的工作场合研发专用机器人,那么研发成本就比较高,这样就会导致机器人的价格相比通用机器人更高,同时市场可能比较小,使得企业的投入产出比比较差,既加重了企业研发压力,也给企业带来了一定的经营风险。
技术实现要素:
4.本申请人针对上述现有生产技术中的缺点,提供一种可拆卸的机器人加长臂,使用本实用新型后,能够使得企业在需要的时候加装在现有机器人的输出终端上,既实现了在狭小空间中作业的目的,又减小了企业研发压力,降低企业经营风险。
5.本实用新型所采用的技术方案如下:
6.一种可拆卸的机器人加长臂,包括呈板状的臂板,所述臂板上开设若干个用于与机器人输出终端相连接的螺丝孔,臂板内部开设传动腔,所述传动腔内固定设置有主动轮和从动轮,所述主动轮和从动轮之间通过皮带相连接,臂板顶端与主动轮相对应的位置固定设置电机,理论上所述电机是低速电机的话,电机的输出端可以直接与主动轮的中心通过平键相连接,但更多的是电机和主动轮之间还设置有行星减速机,通过所述行星减速机降低电机的转速,电机的输出端与行星减速机相接,行星减速机的输出轴与主动轮的中心通过平键相连接;连接件由连接轴和连接盘一体构成,所述连接盘设置在连接轴的底端,连接轴与从动轮平键连接,且连接轴与从动轮同轴心;连接盘与臂板的底面之间存在空隙,连接盘与末端法兰固定连接,所述末端法兰用于视情况安装合适的抓手。
7.进一步地,所述臂板包括形状相对应的上盖板和下盖板,所述上盖板的底部开设传动腔,所述下盖板通过固定件(比如螺丝)固定在上盖板底部。
8.进一步地,所述臂板在与从动轮相对应的位置开设轴承槽,所述轴承槽内固定设置用于套装在连接轴外的轴承。
9.进一步地,所述轴承为滚珠轴承。
10.进一步地,所述臂板的顶面固定设置遮板,所述遮板的位置与从动轮相对应,遮板
用于遮盖轴承。
11.进一步地,所述臂板上开设有连接孔,所述连接孔用于更方便将臂板与机器人输出终端组装并固定连接。
12.本实用新型的有益效果如下:
13.本实用新型结构紧凑,通过连接孔将本实用新型固定安装在现有机器人的输出终端上,电机带动主动轮转动,主动轮通过皮带带动从动轮进而带动末端法兰上的抓手工作。由于臂板是呈板状的,因此非常适合在空间狭小的工作环境中工作。使用本实用新型后,不需要另行研发针对狭小空间工作的机器人,既实现了在狭小空间中作业的目的,又减小了企业研发压力,降低企业经营风险。
附图说明
14.图1为本实用新型的剖视图。
15.图2为图1在a处的放大图。
16.图3为本实用新型中臂板的剖视图。
17.图4为连接件的结构示意图。
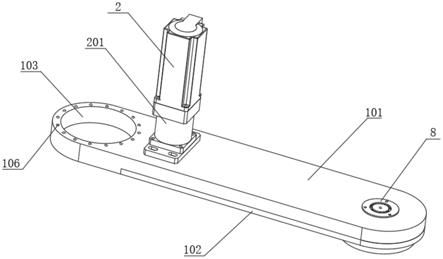
18.图5为本实用新型的立体图。
19.其中:1、臂板;101、上盖板;102、下盖板;103、连接孔;104、传动腔;105、轴承槽;106、螺丝孔;2、电机;201、行星减速机;3、从动轮;4、连接件;401、连接轴;402、连接盘;5、末端法兰;6、皮带;7、主动轮;8、遮板;9、滚珠轴承。
具体实施方式
20.下面结合附图,说明本实用新型的具体实施方式。
21.如图1~图5所示的一种可拆卸的机器人加长臂,包括呈板状的臂板1,臂板1包括形状相对应的上盖板101和下盖板102,上盖板101的底部开设传动腔104,下盖板102通过螺丝固定在上盖板101底部,上盖板101上开设用于更方便将臂板与机器人输出终端组装的连接孔103,连接孔103周围均匀开设若干个螺丝孔106,用于将上盖板101与机器人输出终端固定连接;传动腔104内固定设置有主动轮7和从动轮3,主动轮7和从动轮3之间通过皮带6相连接,上盖板101顶端与主动轮7相对应的位置由上往下依次固定设置电机2及行星减速机201,电机2的输出端与行星减速机201相接,行星减速机201的输出轴与主动轮7的中心通过平键相连接,行星减速机201用于降低电机7的转速;连接件4由连接轴401和连接盘402一体构成,连接盘402设置在连接轴401的底端,连接轴401与从动轮3平键连接,且连接轴401与从动轮3同轴心;上盖板101在与从动轮3相对应的位置开设轴承槽105,同样下盖板102在与从动轮3相对应的位置也开设轴承槽105,轴承槽105内固定设置用于套装在连接轴401外的滚珠轴承9;上盖板101的顶面固定设置遮板8,遮板8的位置与从动轮3相对应,遮板8用于遮盖轴承;连接盘402与下盖板102的底面之间存在空隙,连接盘402与末端法兰5固定连接,末端法兰5用于视情况安装合适的抓手。
22.通过连接孔103和螺丝孔106将本实用新型固定安装在现有机器人的输出终端上,电机2通过行星减速机201降低转速后带动主动轮7转动,主动轮7通过皮带6带动从动轮3进而带动末端法兰5上的抓手工作。由于臂板1是呈板状的,因此非常适合在空间狭小的工作
环境中工作。使用本实用新型后,不需要另行研发针对狭小空间工作的机器人,既实现了在狭小空间中作业的目的,又减小了企业研发压力,降低企业经营风险。
23.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在本实用新型的保护范围之内,可以作任何形式的修改。
技术特征:
1.一种可拆卸的机器人加长臂,其特征在于:包括呈板状的臂板(1),所述臂板(1)上开设若干个螺丝孔(106),臂板(1)内部开设传动腔(104),所述传动腔(104)内固定设置有主动轮(7)和从动轮(3),所述主动轮(7)和从动轮(3)之间通过皮带(6)相连接,臂板(1)顶端与主动轮(7)相对应的位置固定设置电机(2),所述电机(2)的输出端与主动轮(7)的中心通过平键相连接;连接件(4)由连接轴(401)和连接盘(402)一体构成,所述连接盘(402)设置在连接轴(401)的底端,连接轴(401)与从动轮(3)平键连接,且连接轴(401)与从动轮(3)同轴心;连接盘(402)与臂板(1)的底面之间存在空隙,连接盘(402)与末端法兰(5)固定连接。2.根据权利要求1所述的一种可拆卸的机器人加长臂,其特征在于:所述臂板(1)包括形状相对应的上盖板(101)和下盖板(102),所述上盖板(101)的底部开设传动腔(104),所述下盖板(102)通过固定件固定在上盖板(101)底部。3.根据权利要求1所述的一种可拆卸的机器人加长臂,其特征在于:所述臂板(1)在与从动轮(3)相对应的位置开设轴承槽(105),所述轴承槽(105)内固定设置轴承。4.根据权利要求3所述的一种可拆卸的机器人加长臂,其特征在于:所述轴承为滚珠轴承(9)。5.根据权利要求3所述的一种可拆卸的机器人加长臂,其特征在于:所述臂板(1)的顶面在与从动轮(3)相对应的位置固定设置有遮板(8)。6.根据权利要求3所述的一种可拆卸的机器人加长臂,其特征在于:所述臂板(1)上开设有连接孔(103)。7.根据权利要求1所述的一种可拆卸的机器人加长臂,其特征在于:所述电机(2)和主动轮之间还设置有行星减速机(201),电机(2)的输出端与行星减速机(201)相接,行星减速机(201)的输出轴与主动轮(7)的中心通过平键相连接。
技术总结
本实用新型涉及一种可拆卸的机器人加长臂,包括呈板状的臂板,臂板上开设若干个用于与机器人输出终端相连接的螺丝孔,臂板内部开设传动腔,传动腔内固定设置有主动轮和从动轮,主动轮和从动轮之间通过皮带相连接,臂板顶端与主动轮相对应的位置固定设置电机,电机的输出端与主动轮的中心通过平键相连接;连接件由连接轴和连接盘一体构成,连接盘设置在连接轴的底端,连接轴与从动轮平键连接,且连接轴与从动轮同轴心;连接盘与臂板的底面之间存在空隙,连接盘与末端法兰固定连接,末端法兰用于视情况安装合适的抓手。使用本实用新型后,能够使得企业在需要的时候加装在现有机器人的输出终端上,实现在狭小空间中作业的目的。的。的。
技术研发人员:张正峰 徐行康
受保护的技术使用者:九众九机器人有限公司
技术研发日:2020.12.30
技术公布日:2021/11/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1