一种机器人臂连杆定位调整装置的制作方法
1.本实用新型涉及机器人装配领域,尤其涉及一种机器人臂连杆定位调整装置。
背景技术:
2.随着信息化、自动化生产技术的发展,工业机器人在工业中收到越来越广泛的应用。工业机器人是一种多关节机械手或多自由度的机器装置,其具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工的特定工艺。相比于传统的工业设备或人工作业,工业机器人具有鲜明的优势,比如:工业机器人具有易用性、智能化水平高、生产效率高、安全性高及更易于管理,使得工业机器人帮助企业更好地进行生产制造。
3.部分工业机器人的结构上需要使用连杆来提高其整体强度。连杆的主要结构是在杆体的两端分别固定设置一个鱼眼轴承,鱼眼轴承的作用是将连杆固定设置在工业机器人的机器臂上。随着工业机器人运用越来越广泛,因此工业机器人也需要进行标准化以适应大规模的运用,同样的,连杆也需要进行标准化生产以适应大规模的运用,相同规格的连杆上两个鱼眼轴承中心距需要一致。但是由于鱼眼轴承形状相对特殊,因此在杆体的两端分别固定设置鱼眼轴承后,靠人工测量两个鱼眼轴承中心距存在较大误差,导致了连杆经常需要返工,大大影响了企业的生产进度。
技术实现要素:
4.本技术人针对上述现有生产技术中的缺点,提供一种机器人臂连杆定位调整装置,使用本实用新型后,能够保证相同规格的连杆两个鱼眼轴承中心距一定,更利于后期的工业机器人装配,提高企业生产效率,缩小企业生产周期。
5.本实用新型所采用的技术方案如下:
6.一种机器人臂连杆定位调整装置,包括工作平台,所述工作平台的操作面上可拆卸设置有若干对相对应的固定座和调整座,所述固定座的中心开设一个用于插销插入定位的固定插孔,所述调整座的中心开设一个用于插销插入的调整插孔。
7.进一步地,所述固定插孔内设置有导套,所述导套的中心开设有与鱼眼轴承的轴承内径相同直径的通孔,当固定插孔直径大于鱼眼轴承的轴承内径时,不使用导套的话可能插销在定位时倾斜,这样就不利于连杆的调整和定位,导套由于通孔直径与鱼眼轴承的轴承内径相同,在内置导套后保证插销能够垂直插入。
8.进一步地,所述调整插孔内设置有导套,所述导套的中心开设有与鱼眼轴承的轴承内径相同直径的通孔,当调整插孔直径大于鱼眼轴承的轴承内径时,不使用导套的话可能插销在定位时倾斜,这样就不利于连杆的调整和定位,导套由于通孔直径与鱼眼轴承的轴承内径相同,在内置导套后保证插销能够垂直插入。
9.进一步地,所述固定座的顶端可拆卸固定有垫片,所述垫片用于保证杆体在调整过程中水平。
10.进一步地,所述调整座的顶端可拆卸固定有垫片,所述垫片用于保证杆体在调整
过程中水平。
11.进一步地,所述工作平台的操作面开设有移动槽,方便将固定座或者调整座拆下后设置在移动槽内,改变固定座和调整座之间的距离,以适应不同规格的连杆进行定位调整。
12.本实用新型的有益效果如下:
13.本实用新型结构紧凑,操作方便,连杆包括杆体和两个鱼眼轴承,杆体的两端分别开有外螺纹,鱼眼轴承开设有与外螺纹相匹配的内螺纹,杆体与鱼眼轴承螺纹连接,杆体每端的外螺纹还螺纹连接有并帽。杆体与两端的鱼眼轴承及并帽先预装并调整至大致长度,连杆一端(比如左端)的鱼眼轴承放置在固定座的上端面,鱼眼轴承和固定插孔同心放置,插销依次插入鱼眼轴承和固定插孔从而定位,连杆另一端(比如右端)的鱼眼轴承放置在调整座上,通过旋转杆体来调整连杆的整体长度,当连杆另一端(比如右端)的鱼眼轴承与调整插孔同心时,插销能够依次插入鱼眼轴承和调整插孔从而定位,最后利用并帽将两端的鱼眼轴承位置固定。使用本实用新型后,就能够快速统一连杆两端鱼眼轴承的中心距,更利于后期的工业机器人装配,提高企业生产效率。
附图说明
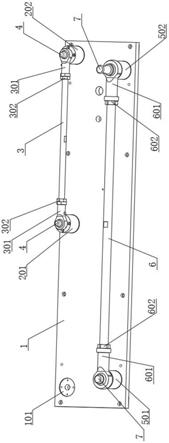
14.图1为本实用新型的立体示意图。
15.图2为本实用新型中的第一调整座和第一导套组合的剖视图。
16.图3为本实用新型中的第二调整座和第二导套组合的剖视图。
17.图4为本实用新型中的第二固定座和垫片组合的剖视图。
18.其中:1、工作平台;101、移动槽;201、第一固定座;202、第一调整座;2021、第一导套;3、第一杆体;301、第一鱼眼轴承;302、第一并帽;4、第一插销;501、第二固定座;502、第二调整座;5021、第二导套;6、第二杆体;601、第二鱼眼轴承;602、第二并帽;7、第二插销;8、垫片。
具体实施方式
19.下面结合附图,说明本实用新型的具体实施方式。
20.如图1~4所示的一种机器人臂连杆定位调整装置,包括工作平台1,工作平台1的操作面上通过螺丝设置有两对相对应的固定座和调整座,分别是第一固定座201和第一调整座202,以及第二固定座501和第二调整座502。第一固定座201的和第二固定座501中心分别开设第一固定插孔和第二固定插孔,第一固定插孔和第二固定插孔均是用于第一插销4和第二插销7插入并以此定位,第一调整座202和第二调整座502的中心分别开设第一调整插孔和第二调整插孔,第一调整插孔和第二调整插孔均是用于第一插销4和第二插销7插入并以此定位;第一调整插孔和第二调整插孔内内分别设置有第一导套2021和第二导套5021,所述第一导套2021和第二导套5021的中心均开设有通孔;第二固定座501的顶端通过螺丝固定有垫片8;工作平台1的操作面开设有移动槽101,方便将第一固定座201拆下后设置在移动槽101内,改变第一固定座201和第一调整座202之间的距离,以适应不同规格的连杆进行定位调整。
21.第一连杆包括第一杆体3、两个第一鱼眼轴承301和两个第一并帽302,第一杆体3
的左端通过螺纹转动连接一个第一鱼眼轴承301和一个第一并帽302,第一杆体3的右端通过螺纹转动连接一个第一鱼眼轴承301和一个第一并帽302,第一并帽302设置在第一鱼眼轴承301内侧;第二连杆包括第二杆体6、两个第二鱼眼轴承601和两个第二并帽602,第二杆体6的左端通过螺纹转动连接一个第二鱼眼轴承601和一个第二并帽602,第二杆体6的右端通过螺纹转动连接一个第二鱼眼轴承601和一个第二并帽602,第二并帽602设置在第二鱼眼轴承601内侧;第一连杆和第二连杆规格不同因而尺寸不同。第一调整插孔直径大于第一连杆右侧的第一鱼眼轴承301内径,第一导套2021的中心开设有与第一鱼眼轴承301的轴承内径相同直径的通孔,第一插销4的外径与第一鱼眼轴承301的轴承内径相对应,因此在第一调整插孔内设置第一导套2021后,防止第一插销4在定位时倾斜造成误差,保证第一插销4能够垂直依次插入第一鱼眼轴承301和第一调整座202;第二调整插孔直径大于第二连杆右侧的第二鱼眼轴承601内径,第二导套5021的中心开设有与第二鱼眼轴承601的轴承内径相同直径的通孔,第二插销7的外径与第二鱼眼轴承601的轴承内径相对应,因此在第二调整插孔内设置第二导套5021后,防止第二插销7在定位时倾斜造成误差,保证第二插销7能够垂直依次插入第二鱼眼轴承601和第二调整座502。
22.定位调整第一连杆时,首先将第一并帽302和第一鱼眼轴承301依次通过螺纹连接到第一杆体3的两端,并将两端的第一鱼眼轴承301调整至大致长度,第一连杆左端的第一鱼眼轴承301放置在第一固定座201的上端面并使得鱼眼轴承和固定插孔同心放置,第一插销4插入将左端的第一鱼眼轴承301定位,第一连杆右端的第一鱼眼轴承301放置在第一调整座202上,通过扳手(未画出)旋转第一杆体3来调整第一连杆的整体长度,当第一连杆右端的第一鱼眼轴承301与第一调整插孔同心时,第一插销4依次插入第一鱼眼轴承301和第一调整插孔从而定位,最后利用扳手(未画出)旋转两端的第一并帽302分别将两端的第一鱼眼轴承301位置固定。
23.同理,定位调整第二连杆时,首先将第二并帽602和第二鱼眼轴承601依次通过螺纹连接到第二杆体6的两端,并将两端的第二鱼眼轴承601调整至大致长度,由于第二固定座501高度低于第二调整座502高度,为了保证第二连杆水平放置,在第二固定座501的顶端通过螺丝固定有垫片8,第二连杆左端的第二鱼眼轴承601放置在第二固定座501的上端面并使得鱼眼轴承和固定插孔同心放置,第二插销7插入将左端的第二鱼眼轴承601定位,第二连杆右端的第二鱼眼轴承601放置在第二调整座502上,通过扳手(未画出)旋转第二杆体6来调整第二连杆的整体长度,当第二连杆右端的第二鱼眼轴承601与第二调整插孔同心时,第二插销7依次插入第二鱼眼轴承601和第二调整插孔从而定位,最后利用扳手(未画出)旋转两端的第二并帽602分别将两端的第二鱼眼轴承601位置固定。
24.因此使用本实用新型后,就能够快速统一连杆两端鱼眼轴承的中心距,更利于后期的工业机器人装配,提高企业生产效率。
25.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在本实用新型的保护范围之内,可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1